转子夹持机构及转子搬运机器人的制作方法
本技术涉及转子,尤其涉及一种转子夹持机构及转子搬运机器人。
背景技术:
1、随着社会的发展,环境污染问题越来越严重,为了取代传统能源产生的环境污染问题,新能源如电能、风能等,在汽车领域较为凸出,逐步取代传统能源如石油等,具体地,传统的燃油汽车,尾气的排放造成的环境污染问题尤为严重,新能源汽车,如电动汽车逐步呈取代旧燃油汽车的趋势,得到广泛的应用发展。
2、电桥驱动部分是新能源汽车中最为核心的三个部件之一,其生产质量以及效率对新能源汽车尤为重要,而转子则是电桥驱动部分的核心部件之一,对于转子的装配,现有技术中一般雇佣操作人员手动进行装配,一方面,由于人工质量的不可控,导致装配误差出现较大的现象,另一方面,人工装配的效率相对较低,影响整个电桥驱动部分的生产效率。
技术实现思路
1、本实用新型的目的在于提供一种通过机器进行转子夹持的转子夹持机构及转子搬运机器人。
2、为达此目的,本实用新型采用以下技术方案:
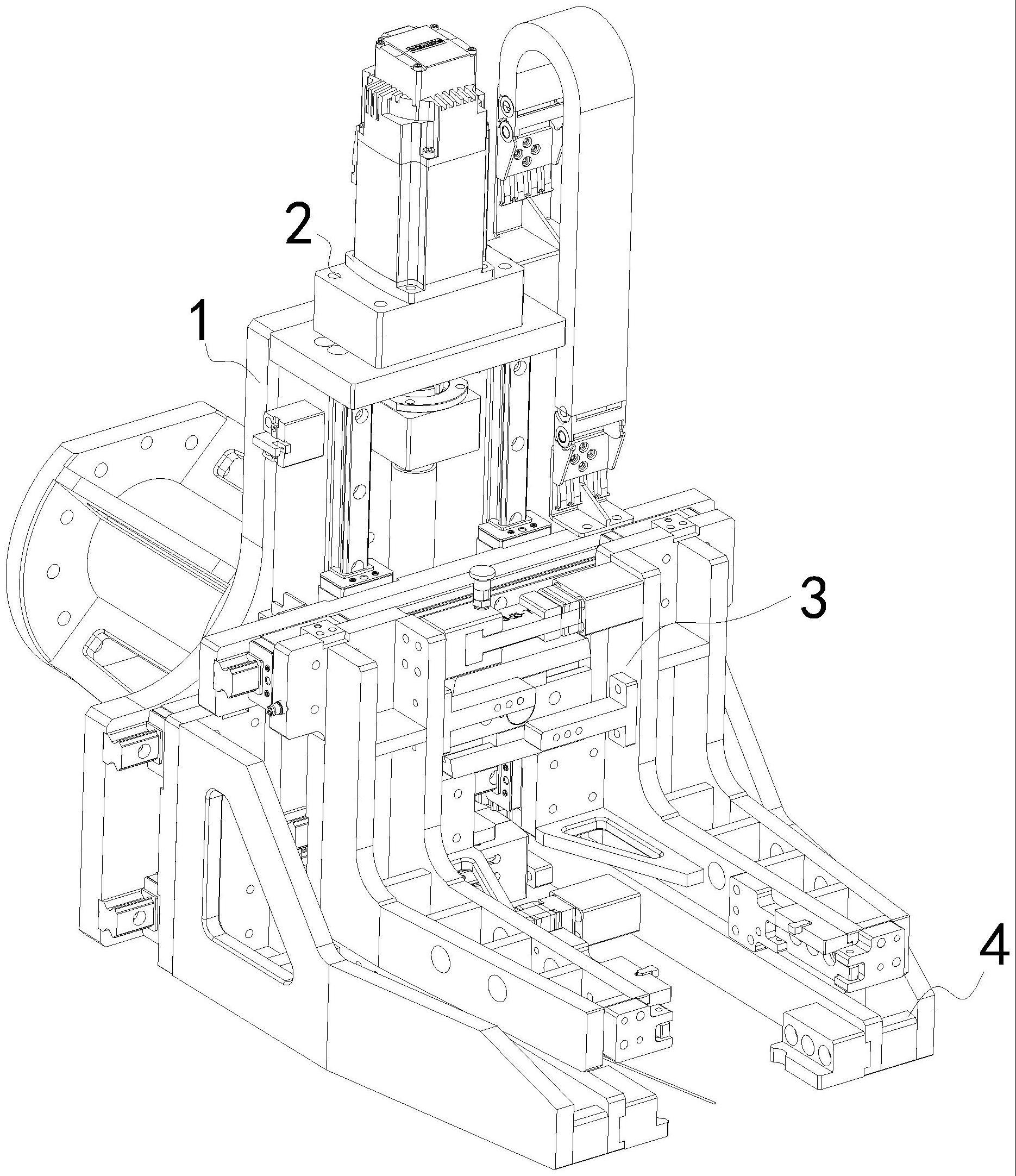
3、本实用新型提供一种转子夹持机构,包括:
4、基座;
5、升降机构,所述升降机构设置在所述基座上;
6、上夹爪机构,所述上夹爪机构设置在所述升降机构上,所述升降机构能够带动所述上夹爪机构上下移动;
7、下夹爪机构,所述下夹爪机构设置在所述基座上,且位于所述上夹爪机构的下方。
8、作为优选,所述下夹爪机构包括下驱动机构以及对称设置的两个下夹爪,所述下驱动机构与所述基座连接,两个所述下夹爪均与所述下驱动机构连接,并由所述下驱动机构驱动进行相对运动。
9、作为优选,所述下夹爪的夹爪端设有第一夹持件,所述第一夹持件形成有第一夹持平面和支撑平面,所述第一夹持平面与所述支撑平面相互垂直。
10、作为优选,所述第一夹持件上设有定位凹槽。
11、作为优选,所述下夹爪机构还包括下限位挡块,所述下限位挡块设置在两个所述下夹爪相向的一面,且至少一个下限位挡块上设有下调节挡块。
12、作为优选,所述上夹爪机构包括上驱动机构以及对称设置的两个上夹爪,所述上驱动机构与所述升降机构连接,两个所述上夹爪均与所述上驱动机构连接,并由所述上驱动机构驱动进行相对运动。
13、作为优选,所述上夹爪的夹爪端设有第二夹持件,所述第二夹持件形成有第二夹持平面和压合平面,所述第二夹持平面与所述压合平面相互垂直。
14、作为优选,所述第二夹持件上设有定位销。
15、作为优选,所述上夹爪机构还包括上限位挡块,所述上限位挡块设置在两个所述上夹爪相向的一面,且至少一个上限位挡块上设有上调节挡块。
16、本实用新型还公开一种转子搬运机器人,包括上述的转子夹持机构。
17、本实用新型的有益效果:
18、本实用新型的转子夹持机构,能够利用上夹爪机构和下夹爪机构分别夹持转子的顶部位置以及底部位置,并且能够利用升降机构实现上夹爪机构的先夹持后抵接的动作,在满足夹持动作的同时,还能实现限位作用,提高转子夹持后的稳定性,一方面,提高了装配质量,另一方面,由于采用机器动作,提高了装配效率。
技术特征:
1.一种转子夹持机构,其特征在于,包括:
2.根据权利要求1所述的转子夹持机构,其特征在于,所述下夹爪机构(4)包括下驱动机构(401)以及对称设置的两个下夹爪(402),所述下驱动机构(401)与所述基座(1)连接,两个所述下夹爪(402)均与所述下驱动机构(401)连接,并由所述下驱动机构(401)驱动进行相对运动。
3.根据权利要求2所述的转子夹持机构,其特征在于,所述下夹爪(402)的夹爪端设有第一夹持件(403),所述第一夹持件(403)形成有第一夹持平面(4031)和支撑平面(4032),所述第一夹持平面(4031)与所述支撑平面(4032)相互垂直。
4.根据权利要求3所述的转子夹持机构,其特征在于,所述第一夹持件(403)上设有定位凹槽(4033)。
5.根据权利要求2-4任意一项所述的转子夹持机构,其特征在于,所述下夹爪机构(4)还包括下限位挡块(404),所述下限位挡块(404)设置在两个所述下夹爪(402)相向的一面,且至少一个下限位挡块(404)上设有下调节挡块(405)。
6.根据权利要求1所述的转子夹持机构,其特征在于,所述上夹爪机构(3)包括上驱动机构(301)以及对称设置的两个上夹爪(302),所述上驱动机构(301)与所述升降机构(2)连接,两个所述上夹爪(302)均与所述上驱动机构(301)连接,并由所述上驱动机构(301)驱动进行相对运动。
7.根据权利要求6所述的转子夹持机构,其特征在于,所述上夹爪(302)的夹爪端设有第二夹持件(303),所述第二夹持件(303)形成有第二夹持平面(3031)和压合平面(3032),所述第二夹持平面(3031)与所述压合平面(3032)相互垂直。
8.根据权利要求7所述的转子夹持机构,其特征在于,所述第二夹持件(303)上设有定位销(3033)。
9.根据权利要求6-8任意一项所述的转子夹持机构,其特征在于,所述上夹爪机构(3)还包括上限位挡块(304),所述上限位挡块(304)设置在两个所述上夹爪(302)相向的一面,且至少一个上限位挡块(304)上设有上调节挡块(305)。
10.一种转子搬运机器人,其特征在于,包括权利要求1-9任意一项所述的转子夹持机构。
技术总结
本技术属于转子技术领域,公开了转子夹持机构及转子搬运机器人,其中转子夹持机构包括:基座;升降机构,所述升降机构设置在所述基座上;上夹爪机构,所述上夹爪机构设置在所述升降机构上,所述升降机构能够带动所述上夹爪机构上下移动;下夹爪机构,所述下夹爪机构设置在所述基座上,且位于所述上夹爪机构的下方。本技术的转子夹持机构能够利用上夹爪机构和下夹爪机构分别夹持转子的顶部位置以及底部位置,并且能够利用升降机构实现上夹爪机构的先夹持后抵接的动作,在满足夹持动作的同时,还能实现限位作用,提高转子夹持后的稳定性,一方面,提高了装配质量,另一方面,由于采用机器动作,提高了装配效率。
技术研发人员:陈松,苏建良
受保护的技术使用者:上海克来机电自动化工程股份有限公司
技术研发日:20230208
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!