一种自动翻转装夹机械臂的制作方法
本技术涉及机械臂,尤其涉及的是一种自动翻转装夹机械臂。
背景技术:
1、在对发电机转子轴进行直纹加工时,需要将电机转子轴放置到滚扎机上进行直纹滚扎,而一台滚扎机一次只能针对一根转子轴进行加工,因此需要机械臂不断得进行上下料的工作。在申请号为cn202220129484.x的专利公开了一种发电机转子轴直纹自动加工装置,其在进行上下料时,分别采用上料单元与卸料单元,而上料单元与卸料单元均单独采用驱动件进行驱动,这在一定程度上增加了制作成本,且在工作时,只有当卸料单元完成卸料复位后,上料单元方能进行工作,整个工作流程所耗费的时间较多,这使得整个加工效率降低。
2、有鉴于此,本发明人针对现有技术中的上述缺陷深入研究,遂有本案产生。
技术实现思路
1、本实用新型的主要目的在于提供一种自动翻转装夹机械臂,解决了上述背景技术中提出的问题。
2、为了达成上述目的,本实用新型的解决方案是:
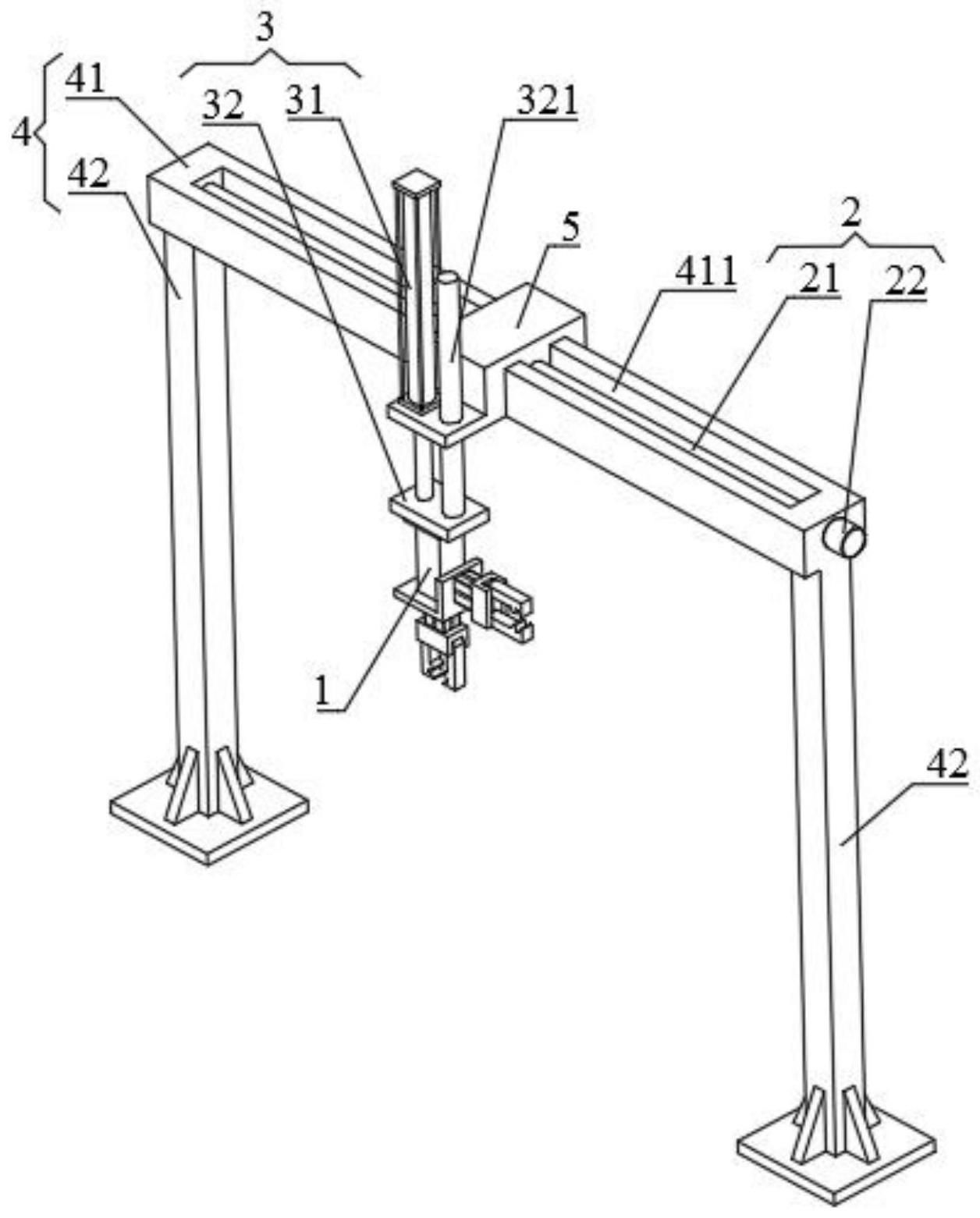
3、一种自动翻转装夹机械臂,包括夹持机构、驱动夹持机构横向移动的横向驱动组件、驱动夹持机构纵向移动的纵向驱动组件、以及安装架;所述安装架包括横梁、以及位于横梁两端的支撑柱;所述夹持机构包括上料夹持单元、下料夹持单元、侧姿气缸以及连接件;所述连接件包括第一连接板以及第二连接板,所述第二连接板垂直连接在所述第一连接板的端部;所述上料夹持单元安装在所述第一连接板的外侧,所述下料夹持单元连接在所述第二连接板的外侧;所述第一连接板的内侧与所述侧姿气缸活动连接。
4、进一步,所述上料夹持单元包括第一夹持气缸、以及两个对称安装在所述第一夹持气缸上的第一爪夹;所述下料夹持单元包括第二夹持气缸以及两个对称安装在第二夹爪气缸上的第二爪夹;所述第一夹持气缸固定安装在所述第一连接板上,所述第二夹持气缸固定安装在所述第二连接板上。
5、进一步,所述横向驱动组件包括丝杆以及电机;所述横梁的顶部沿横梁的长度方向形成有滑槽,所述丝杆转动安装在所述滑槽内,所述电机固定安装在所述横梁的端部,所述电机的输出轴与所述丝杆的端部传动连接。
6、进一步,所述横梁上滑动安装有活动块,所述活动块的底部形成有与所述滑槽配合的滑块所述滑块上形成有与所述丝杆配合的螺纹孔;所述活动块的一侧还设有承载板。
7、进一步,所述纵向驱动组件包括固定安装在所述承载板顶部的驱动气缸、以及安装所述侧姿气缸的安装板,所述安装板固定连接在所述驱动气缸的活塞杆的端部;所述安装板的顶部形成有导向杆,所述承载板上形成有与所述导向杆配合的导向孔。
8、进一步,所述侧姿气缸固定安装在所述安装板的底部。
9、采用上述结构后,本实用新型涉及的一种自动翻转装夹机械臂,与现有技术相比,本案将上料夹持单元与下料夹持单元集成在一个“l”形的连接件上,并且通过侧姿气缸驱动连接件实现90度的翻转;当需要上下料时,上料夹持单元先预夹一个待加工工件,然后通过横向驱动组件与纵向驱动组件移动到加工装置上,通过下料夹持单元将加工完成后的工件取下,接着通过侧姿气缸驱动连接件转动90°,使上料夹持单元对着加工装置,将待加工的工件放置在加工装置上即可,如此,只需要移动一次夹持机构,既可完成对工件的上料与下料,提高了整个加工的效率。
技术特征:
1.一种自动翻转装夹机械臂,其特征在于,包括夹持机构、驱动夹持机构横向移动的横向驱动组件、驱动夹持机构纵向移动的纵向驱动组件、以及安装架;所述安装架包括横梁、以及位于横梁两端的支撑柱;所述夹持机构包括上料夹持单元、下料夹持单元、侧姿气缸以及连接件;所述连接件包括第一连接板以及第二连接板,所述第二连接板垂直连接在所述第一连接板的端部;所述上料夹持单元安装在所述第一连接板的外侧,所述下料夹持单元连接在所述第二连接板的外侧;所述第一连接板的内侧与所述侧姿气缸活动连接。
2.根据权利要求1所述的一种自动翻转装夹机械臂,其特征在于,所述上料夹持单元包括第一夹持气缸、以及两个对称安装在所述第一夹持气缸上的第一爪夹;所述下料夹持单元包括第二夹持气缸以及两个对称安装在第二夹爪气缸上的第二爪夹;所述第一夹持气缸固定安装在所述第一连接板上,所述第二夹持气缸固定安装在所述第二连接板上。
3.根据权利要求1所述的一种自动翻转装夹机械臂,其特征在于,所述横向驱动组件包括丝杆以及电机;所述横梁的顶部沿横梁的长度方向形成有滑槽,所述丝杆转动安装在所述滑槽内,所述电机固定安装在所述横梁的端部,所述电机的输出轴与所述丝杆的端部传动连接。
4.根据权利要求3所述的一种自动翻转装夹机械臂,其特征在于,所述横梁上滑动安装有活动块,所述活动块的底部形成有与所述滑槽配合的滑块,所述滑块上形成有与所述丝杆配合的螺纹孔;所述活动块的一侧还设有承载板。
5.根据权利要求4所述的一种自动翻转装夹机械臂,其特征在于,所述纵向驱动组件包括固定安装在所述承载板顶部的驱动气缸、以及安装所述侧姿气缸的安装板,所述安装板固定连接在所述驱动气缸的活塞杆的端部;所述安装板的顶部形成有导向杆,所述承载板上形成有与所述导向杆配合的导向孔。
6.根据权利要求5所述的一种自动翻转装夹机械臂,其特征在于,所述侧姿气缸固定安装在所述安装板的底部。
技术总结
本技术涉及机械臂技术领域,公开了一种自动翻转装夹机械臂,包括夹持机构、驱动夹持机构横向移动的横向驱动组件、驱动夹持机构纵向移动的纵向驱动组件、以及安装架;所述安装架包括横梁、以及位于横梁两端的支撑柱;所述夹持机构包括上料夹持单元、下料夹持单元、侧姿气缸以及连接件;所述连接件包括第一连接板以及第二连接板,所述第二连接板垂直连接在所述第一连接板的端部;所述上料夹持单元安装在所述第一连接板的外侧,所述下料夹持单元连接在所述第二连接板的外侧;所述第一连接板的内侧与所述侧姿气缸活动连接。本案通过侧姿气缸驱动连接件转动90°如此,只需要移动一次夹持机构,既可完成对工件的上料与下料,提高了整个加工的效率。
技术研发人员:柯昌平,孙林,柯沛,卓成义,彭刚
受保护的技术使用者:重庆市浩帆机械有限公司
技术研发日:20230523
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!