一种适用于真空焊接异形件机械手的制作方法
本技术涉及机械手,具体涉及一种适用于真空焊接异形件机械手。
背景技术:
1、真空焊接的定义,简单来说就是在真空环境下完成焊接过程,但又分为我们常见的常规的二保焊、氩弧焊、激光焊等和焊接pcb板、芯片封装、功率器件这些的回流焊接。
2、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。在异形件机械零件加工时,为提高生产效率,会使用机械手替代人工拿取工件进行上料和下料,便于自动化生产。
3、针对现有技术存在以下问题:
4、1、现有的适用于真空焊接异形件机械手,在使用的过程中,因为处于真空的原因,工件在进行夹持时,只能凭借肉眼观察,不能确定工件是否完全夹持了,使用时有一定的误差;
5、2、现有的适用于真空焊接异形件机械手,在使用的过程中,机械手一般是不能升降的,使得焊接工件底部和顶部的时候存在一定的不便利,功能性较差;
6、3、现有的适用于真空焊接异形件机械手,在使用的过程中,机械手对异型件的夹持比较松弛。容易在焊接时脱落,从而导致损坏,使得工件报废,比较浪费。
技术实现思路
1、为解决上述技术问题,本实用新型所采用的技术方案是:
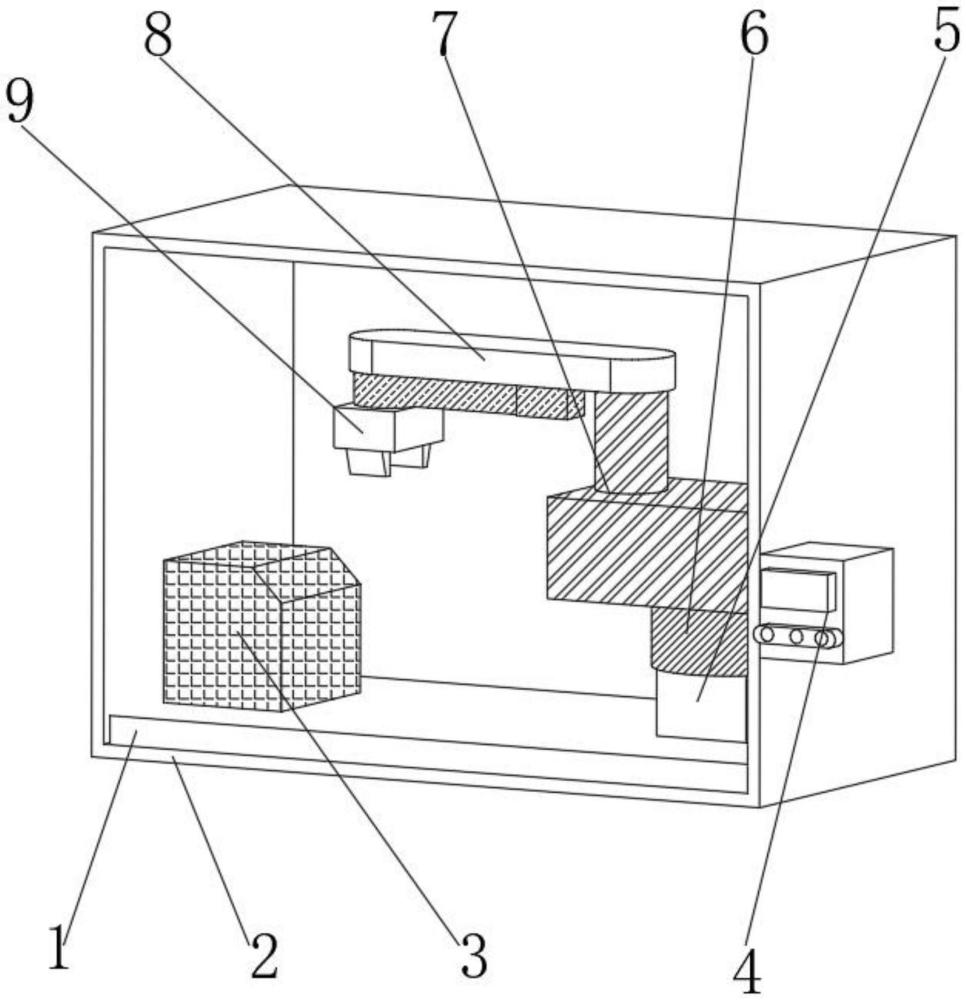
2、一种适用于真空焊接异形件机械手,包括主体,所述主体的下端设置有真空室,所述主体一侧的上端安装有焊接机构,所述真空室的一端设置有提醒装置,所述主体另一侧的上端安装有安装块,所述安装块的上端安装有旋转机构,所述旋转机构的上端设置有升降装置,所述升降装置的一端安装有延伸板,所述延伸板的下端设置有夹持装置;所述提醒装置包括安装座,所述安装座的一端与真空室的一端固定连接,所述安装座的下端设置有感应传感器,所述安装座内部的下端设置有控制器,所述安装座一端的正面安装有指示灯,所述安装座的一端安装有操作按钮,所述安装座另一端的正面设置有显示屏;所述升降装置包括升降底座,所述升降底座的下端与旋转机构的上端固定连接,所述升降底座内部的下端设置有升降电机,所述升降电机的上端安装有第一齿轮,所述第一齿轮的一端啮合有齿块柱,所述齿块柱的下端安装有第一转槽,所述齿块柱内部的一端安装有伸缩柱,所述伸缩柱的上端安装有连接块。
3、本实用新型技术方案的进一步改进在于:所述安装座的下端与感应传感器的上端固定连接。
4、本实用新型技术方案的进一步改进在于:所述安装座另一端的正面与显示屏的背面固定连接。
5、本实用新型技术方案的进一步改进在于:所述升降底座内部的下端与升降电机的下端固定连接。
6、本实用新型技术方案的进一步改进在于:所述伸缩柱的上端与连接块的下端固定连接。
7、本实用新型技术方案的进一步改进在于:所述夹持装置包括夹持底座,所述夹持底座的上端与延伸板的下端固定连接,所述夹持底座内部的上端设置有双向电机,所述双向电机的一端安装有第二齿轮,所述第二齿轮的一端啮合有齿轮柱,所述齿轮柱的一端安装有第二转槽,所述齿轮柱的另一端设置有活动块,所述活动块的下端安装有夹持块。
8、本实用新型技术方案的进一步改进在于:所述夹持底座内部的上端与双向电机的上端固定连接,活动块的下端与夹持块的上端固定连接。
9、由于采用了上述技术方案,本实用新型相对现有技术来说,取得的技术进步是:
10、1、本实用新型提供一种适用于真空焊接异形件机械手,通过安装座、感应传感器、控制器、指示灯、操作按钮和显示屏的共同作用下,增加了异型件机械手在夹持工件后可以对使用人员进行提醒的功能,此改动通过感应传感器感应到机械手将工件夹持时,会将数据传输到控制器上,然后控制器会将数据显示在显示屏上,同时使指示灯的黄灯亮起,当感应传感器感应到机械手将工件夹持完成时,将数据传输给控制器,然后使指示灯变成绿灯,当机械手故障时,控制器会使指示灯变成后灯来对使用人员进行提醒。
11、2、本实用新型提供一种适用于真空焊接异形件机械手,通过升降底座、升降电机、第一齿轮、齿块柱、第一转槽、伸缩柱和连接块的共同作用下,增加了异型件机械手可以根据实际的需求进行自身升降的功能,此改动通过正启动升降电机,使升降电机带动第一齿轮进行旋转,从而通过第一转槽将与第一齿轮啮合的齿块柱进行旋转,然后齿块柱在旋转的过程中将内部的伸缩柱挤出,使伸缩柱通过连接块带动异型件机械手进行上升,反之下降。
12、3、本实用新型提供一种适用于真空焊接异形件机械手,通过夹持底座、双向电机、第二齿轮、齿轮柱、第二转槽、活动块和夹持块的共同作用下,增加了异型件机械手可以更快速、更稳定的对异型件进行夹持的功能,此改动通过反启动双向电机,使双向电机带动第二齿轮进行旋转,然后第二齿轮会通过第二转槽带动齿轮柱进行旋转,此时齿轮柱上的活动块会带动夹持块向一侧移动,从而留出足够的空间,然后将异型件放入,然后反转双向电机,使活动块带动夹持块向异型件靠近,从而将异型件夹持,同时因为两边都设有夹持块,使得夹持速度和稳定性都提高了很多。
技术特征:
1.一种适用于真空焊接异形件机械手,包括主体(1),其特征在于:所述主体(1)的下端设置有真空室(2),所述主体(1)一侧的上端安装有焊接机构(3),所述真空室(2)的一端设置有提醒装置(4),所述主体(1)另一侧的上端安装有安装块(5),所述安装块(5)的上端安装有旋转机构(6),所述旋转机构(6)的上端设置有升降装置(7),所述升降装置(7)的一端安装有延伸板(8),所述延伸板(8)的下端设置有夹持装置(9);
2.根据权利要求1所述的一种适用于真空焊接异形件机械手,其特征在于:所述安装座(41)的下端与感应传感器(42)的上端固定连接。
3.根据权利要求2所述的一种适用于真空焊接异形件机械手,其特征在于:所述安装座(41)另一端的正面与显示屏(46)的背面固定连接。
4.根据权利要求1所述的一种适用于真空焊接异形件机械手,其特征在于:所述升降底座(71)内部的下端与升降电机(72)的下端固定连接。
5.根据权利要求4所述的一种适用于真空焊接异形件机械手,其特征在于:所述伸缩柱(76)的上端与连接块(77)的下端固定连接。
6.根据权利要求1所述的一种适用于真空焊接异形件机械手,其特征在于:所述夹持装置(9)包括夹持底座(91),所述夹持底座(91)的上端与延伸板(8)的下端固定连接,所述夹持底座(91)内部的上端设置有双向电机(92),所述双向电机(92)的一端安装有第二齿轮(93),所述第二齿轮(93)的一端啮合有齿轮柱(94),所述齿轮柱(94)的一端安装有第二转槽(95),所述齿轮柱(94)的另一端设置有活动块(96),所述活动块(96)的下端安装有夹持块(97)。
7.根据权利要求6所述的一种适用于真空焊接异形件机械手,其特征在于:所述夹持底座(91)内部的上端与双向电机(92)的上端固定连接,活动块(96)的下端与夹持块(97)的上端固定连接。
技术总结
本技术公开了一种适用于真空焊接异形件机械手,涉及机械手技术领域,包括主体,所述主体的下端设置有真空室,所述主体一侧的上端安装有焊接机构,所述真空室的一端设置有提醒装置,所述主体另一侧的上端安装有安装块,所述安装块的上端安装有旋转机构,所述旋转机构的上端设置有升降装置,所述升降装置的一端安装有延伸板。本技术通过感应传感器感应到机械手将工件夹持时,会将数据传输到控制器上,然后控制器会将数据显示在显示屏上,同时使指示灯的黄灯亮起,当感应传感器感应到机械手将工件夹持完成时,将数据传输给控制器,然后使指示灯变成绿灯,当机械手故障时,控制器会使指示灯变成后灯来对使用人员进行提醒。
技术研发人员:赵海燕,赵文彪,李超
受保护的技术使用者:沈阳精创真空技术有限公司
技术研发日:20230703
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!