一种用于机器人折弯的自动化生产线的制作方法
本技术涉及中厚板加工设备,更具体地说,它涉及一种用于机器人折弯的自动化生产线。
背景技术:
1、在液压支架侧板折弯加工时,通常采用人工折弯、工件拆分焊接两种方式,如果采用人工折弯,会带来以下问题:(1)人工折弯操作时安全风险较大;(2)工件折弯质量受到操作人员状态、操作熟练度等多种人为因素的影响,加工质量无法保持稳定。如果采用工件拆分焊接,又会带来以下问题:(1)焊接工作量翻倍增加,降低产能;(2)焊工技能水平不一致导致焊接质量参差不齐,影响产品质量。因此亟需一种用于机器人折弯的自动化生产线,用以解决目前折弯加工工艺存在的以上问题。
技术实现思路
1、针对现有技术存在的不足,本实用新型的目的在于提出一种用于机器人折弯的自动化生产线,用以解决目前折弯加工工艺存在的以上问题。
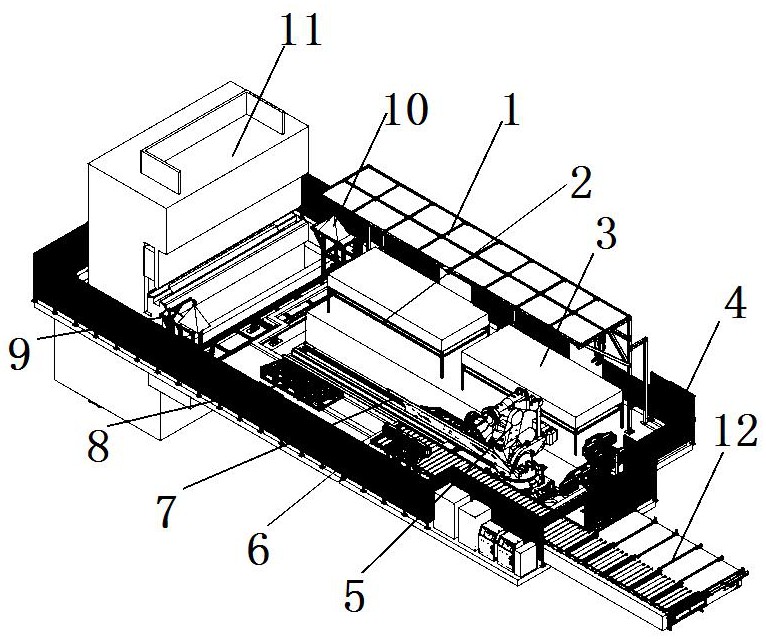
2、本实用新型提供了如下技术方案:一种用于机器人折弯的自动化生产线,包括来料系统、机器人搬运系统、折弯系统、出料机构,来料系统包括物料周转agv、视觉识别装置,视觉识别装置包括视觉支架和安装在视觉支架上的视觉监测机构,视觉支架的下方具有至少一个用于放置来料托盘的来料托盘位,视觉监测机构用于对下方来料托盘的物料种类、情况进行监测识别,物料周转agv用于周转来料托盘;机器人搬运系统与来料系统并行设置,包括行走地轨、搬运机器人、抓手支架,搬运机器人上端设置抓手座和抓手,所述抓手用于抓取来料托盘位的物料,抓手支架用于放置不同抓手、供搬运机器人快速更换抓手,搬运机器人沿行走地轨移动、对物料进行转运;折弯系统位于机器人搬运系统的后方,包括用于对搬运机器人送来的物料进行折弯加工的折弯机,出料机构位于机器人搬运系统的前方,折弯后物料受到搬运机器人作用送至出料机构向下一工序输送。
3、进一步的,机器人搬运系统还包括旋转对中装置,旋转对中装置位于行走地轨旁靠近折弯系统的一侧,用于对物料进行旋转、对中。
4、进一步的,折弯系统还包括设置在折弯机进出料位置处的钢板测厚装置和前托料机构,钢板测厚装置用于对物料厚度进行检测,前托料机构用于在物料折弯加工过程中跟随物料进行承托。
5、进一步的,用于机器人折弯的自动化生产线还包括位于来料系统、机器人搬运系统、折弯系统、出料机构外围的安全防护系统,安全防护系统包括安全围栏、安全光栅和安全门。
6、进一步的,所述出料机构为辊道线。
7、有益效果:使用本实用新型加工生产液压支架侧板(也能用于加工其他机械领域折弯件)过程如下:叠放有多个物料的来料托盘受到物料周转agv转运,被搬运放置到来料托盘位处,视觉监测机构监测来料托盘位上的物料种类与数量,并上传至控制中心,控制中心根据物料种类确定搬运机器人抓取方式与折弯加工方式,搬运机器人通过相应抓手抓取物料并将物料沿行走地轨向后运输,抓手支架上的多种抓手可供搬运机器人根据物料种类快速选择与更换,满足不同物料抓取需求,物料运输至行走地轨后端时经旋转对中装置旋转摆正,保证物料以正确姿态进入折弯机内部,之后经过钢板测厚装置检测,保证物料厚度合格再进入折弯机内部进行加工,折弯过程中由前托料机构跟随物料进行承托辅助,保证物料成型质量,之后再经过搬运机器人送至辊道线,以送至下一工序;综合以上过程中,可以发现,本实用新型具有自动上料、转运、摆正、加工、下料的功能,工作覆盖范围大、通用性好,根据物料种类选择不同加工模式,可实现工件精准定位、加工,加工效率高,大大节省人力物力并保证加工质量与一致性。
技术特征:
1.一种用于机器人折弯的自动化生产线,其特征是,包括来料系统、机器人搬运系统、折弯系统、出料机构,来料系统包括物料周转agv、视觉识别装置,视觉识别装置包括视觉支架和安装在视觉支架上的视觉监测机构,视觉支架的下方具有至少一个用于放置来料托盘的来料托盘位,视觉监测机构用于对下方来料托盘的物料种类、情况进行监测识别,物料周转agv用于周转来料托盘;机器人搬运系统与来料系统并行设置,包括行走地轨、搬运机器人、抓手支架,搬运机器人上端设置抓手座和抓手,所述抓手用于抓取来料托盘位的物料,抓手支架用于放置不同抓手、供搬运机器人快速更换抓手,搬运机器人沿行走地轨移动、对物料进行转运;折弯系统位于机器人搬运系统的后方,包括用于对搬运机器人送来的物料进行折弯加工的折弯机,出料机构位于机器人搬运系统的前方,折弯后物料受到搬运机器人作用送至出料机构向下一工序输送。
2.如权利要求1所述的一种用于机器人折弯的自动化生产线,其特征是,机器人搬运系统还包括旋转对中装置,旋转对中装置位于行走地轨旁靠近折弯系统的一侧,用于对物料进行旋转、对中。
3.如权利要求1所述的一种用于机器人折弯的自动化生产线,其特征是,折弯系统还包括设置在折弯机进出料位置处的钢板测厚装置和前托料机构,钢板测厚装置用于对物料厚度进行检测,前托料机构用于在物料折弯加工过程中跟随物料进行承托。
4.如权利要求1或2或3所述的一种用于机器人折弯的自动化生产线,其特征是,还包括位于来料系统、机器人搬运系统、折弯系统、出料机构外围的安全防护系统,安全防护系统包括安全围栏、安全光栅和安全门。
5.如权利要求1或2或3所述的一种用于机器人折弯的自动化生产线,其特征是,所述出料机构为辊道线。
技术总结
本技术涉及一种用于机器人折弯的自动化生产线,包括来料系统、机器人搬运系统、折弯系统、出料机构,来料系统包括物料周转AGV、视觉识别装置,视觉监测机构用于对下方来料托盘的物料种类、情况进行监测识别,机器人搬运系统包括行走地轨、搬运机器人、抓手支架,抓手用于抓取来料托盘位的物料,搬运机器人沿行走地轨移动、对物料进行转运;折弯系统位于机器人搬运系统的后方,包括用于对搬运机器人送来的物料进行折弯加工的折弯机,出料机构位于机器人搬运系统的前方,折弯后物料受到搬运机器人作用送至出料机构向下一工序输送。本技术能够解决目前折弯加工工艺存在的问题,具有自动化生产折弯、智能识别加工的功能。
技术研发人员:冯晓闯,王东安,赵旭,赵祥宇,王如冬
受保护的技术使用者:郑州煤机数耘智能科技有限公司
技术研发日:20230817
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!