一种基于协作焊接机器人的刀盘焊接装置的制作方法
本发明属于隧道施工用焊接,具体涉及一种基于协作焊接机器人的刀盘焊接装置。
背景技术:
1、盾构机作为地下工程的重要施工装备,在隧道建设方面发挥着越来越重要的作用。由于盾构机体积和质量庞大,不得不将其拆将运输,到工作地点后再将其组装。
2、其中,盾构机刀盘作为盾构机的核心部件,其组装采用焊接的方式,其超长的焊缝导致焊接工作强度非常高,而且目前主要采用人工焊接,传统的固定式焊接机器人,在焊接好一个位置的焊缝后,需要人工调整到下一个焊缝处,盾构机体积庞大焊缝繁多,极大降低了焊接效率。并且工作环境恶劣,人为焊接的方式导致焊接效率低且焊接质量无法保证,甚至无法顺利完成焊接工作,对施工造成不利影响。
技术实现思路
1、本发明的目的在于提供一种基于协作焊接机器人的刀盘焊接装置,以解决人工焊接的焊接效率低且焊接质量无法保证的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于协作焊接机器人的刀盘焊接装置,包括:
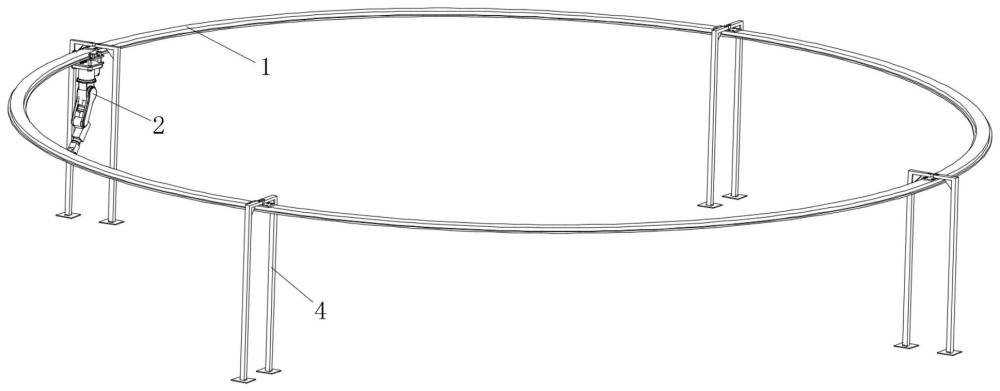
3、导轨机构,所述导轨机构包括若干个弧形导轨,若干个所述弧形导轨首尾连接,若干个所述弧形导轨上分别设置有内导轨和外壁导轨,若干个所述弧形导轨的连接处分别设置有支撑机构,所述支撑机构用于抬高所述弧形导轨与地面的高度;
4、焊接机构,所述焊接机构包括机械臂和底座,所述机械臂上设置有激光视觉传感器,所述底座固定连接在所述机械臂的一端;
5、驱动机构,所述驱动机构活动安装在所述弧形导轨上,且下侧与焊接机构固定连接,所述驱动机构包括主轮和辅助轮,所述主轮转动安装在所述内导轨内,所述辅助轮转动安装在所述外壁导轨上。
6、优选的,所述驱动机构还包括上底板、下底板、驱动电机、斜齿轮一和斜齿轮二,所述上底板滑动连接在所述弧形导轨下侧的外壁,所述驱动电机固定安装在所述上底板下侧的外壁,所述斜齿轮一固定安装在所述驱动电机的输出端,所述斜齿轮二转动安装在所述上底板下侧的外壁,且其一端延伸至所述上底板的上侧,且一端与所述主轮固定连接,所述斜齿轮一与所述斜齿轮二啮合;
7、所述底座固定安装在所述下底板下侧的外壁。
8、优选的,所述支撑机构包括支撑柱和固定板,所述支撑柱呈倒置l型,所述支撑柱的l型拐角处设置有加强筋,所述支撑柱对称设置在所述固定板相对两侧的外壁,所述支撑柱的下侧外壁固定安装有支撑底板,所述支撑底板的面积大于所述支撑柱,所述弧形导轨的两端均固定安装在所述固定板下侧的外壁。
9、优选的,所述固定板上设置有若干个对称的固定孔,所述弧形导轨与所述支撑柱分别通过所述固定孔固定安装在所述固定板上。
10、优选的,所述弧形导轨的数量为四个,四个所述弧形导轨均为四分之一圆弧形状,所述弧形导轨首尾相连形成圆形。
11、优选的,所述辅助轮的数量为四个,四个所述辅助轮对称设置,且均转动安装在所述上底板上侧的外壁。
12、优选的,所述内导轨呈t字形,所述主轮位于所述内导轨内,且与所述内导轨相对两侧的外壁相触。
13、优选的,所述外壁导轨呈l形,且关于所述内导轨对称。
14、优选的,所述主轮上设置有橡胶层,所述橡胶层固定连接在所述主轮的外壁。
15、本发明的技术效果和优点:在进行焊接工作时,安装好导轨并将焊接机构固定在驱动机构上,与导轨机构配合的支撑机构将弧形导轨组成的圆形轨道向上支撑,使得导轨机构悬空于地面,以使驱动机构带动焊接机构运动时,机械臂具有多种调整角度,避免使用的局限性;通过驱动电机驱使斜齿轮一旋转,带动斜齿轮二旋转,进而带动与斜齿轮二固定连接的主轮旋转在内导轨的内部,以达到调整焊接机构位置的目的;通过机械臂运动、激光视觉传感器扫描一周、通过计算机制定合适的焊接路线,识别所有焊缝并制定焊接路线,最后可准确、自动的完成焊接工作,实现自动焊接,提高焊接效率和焊接质量的。
技术特征:
1.一种基于协作焊接机器人的刀盘焊接装置,其特征在于,包括:
2.根据权利要求1所述的一种基于协作焊接机器人的刀盘焊接装置,其特征在于,所述驱动机构(3)还包括上底板(33)、下底板(34)、驱动电机(35)、斜齿轮一(36)和斜齿轮二(37),所述上底板(33)滑动连接在所述弧形导轨(11)下侧的外壁,所述驱动电机(35)固定安装在所述上底板(33)下侧的外壁,所述斜齿轮一(36)固定安装在所述驱动电机(35)的输出端,所述斜齿轮二(37)转动安装在所述上底板(33)下侧的外壁,且其一端延伸至所述上底板(33)的上侧,且一端与所述主轮(31)固定连接,所述斜齿轮一(36)与所述斜齿轮二(37)啮合;
3.根据权利要求2所述的一种基于协作焊接机器人的刀盘焊接装置,其特征在于,所述支撑机构(4)包括支撑柱(41)和固定板(42),所述支撑柱(41)呈倒置l型,所述支撑柱(41)的l型拐角处设置有加强筋(44),所述支撑柱(41)对称设置在所述固定板(42)相对两侧的外壁,所述支撑柱(41)的下侧外壁固定安装有支撑底板(43),所述支撑底板(43)的面积大于所述支撑柱(41),所述弧形导轨(11)的两端均固定安装在所述固定板(42)下侧的外壁。
4.根据权利要求3所述的一种基于协作焊接机器人的刀盘焊接装置,其特征在于,所述固定板(42)上设置有若干个对称的固定孔(45),所述弧形导轨(11)与所述支撑柱(41)分别通过所述固定孔(45)固定安装在所述固定板(42)上。
5.根据权利要求4所述的一种基于协作焊接机器人的刀盘焊接装置,其特征在于,所述弧形导轨(11)的数量为四个,四个所述弧形导轨(11)均为四分之一圆弧形状,所述弧形导轨(11)首尾相连形成圆形。
6.根据权利要求4所述的一种基于协作焊接机器人的刀盘焊接装置,其特征在于,所述辅助轮(32)的数量为四个,四个所述辅助轮(32)对称设置,且均转动安装在所述上底板(33)上侧的外壁。
7.根据权利要求2所述的一种基于协作焊接机器人的刀盘焊接装置,其特征在于,所述内导轨(12)呈t字形,所述主轮(31)位于所述内导轨(12)内,且与所述内导轨(12)相对两侧的外壁相触。
8.根据权利要求5所述的一种基于协作焊接机器人的刀盘焊接装置,其特征在于,所述外壁导轨(13)呈l形,且关于所述内导轨(12)对称。
9.根据权利要求5所述的一种基于协作焊接机器人的刀盘焊接装置,其特征在于,所述主轮(31)上设置有橡胶层,所述橡胶层固定连接在所述主轮(31)的外壁。
技术总结
本发明公开了一种基于协作焊接机器人的刀盘焊接装置,包括:导轨机构,导轨机构包括若干个弧形导轨,若干个弧形导轨首尾连接,若干个弧形导轨的连接处分别设置有支撑机构,支撑机构用于驱使弧形导轨抬高于地面,若干个弧形导轨上分别设置有内导轨和外壁导轨;焊接机构,焊接机构包括机械臂和底座,机械臂上设置有激光视觉传感器;驱动机构,驱动机构活动安装在弧形导轨上,且下侧与焊接机构固定连接。本发明提供基于协作焊接机器人的刀盘焊接装置,通过机械臂运动、激光视觉传感器扫描一周、通过计算机制定合适的焊接路线,识别所有焊缝并制定焊接路线,可准确、自动的完成焊接工作,实现自动焊接,提高焊接效率和焊接质量的。
技术研发人员:王德福,黄书华,陈建福,陆法猛,郭善霄,郭守志,田兆平,葛晶晶,薛强,苏颂,马俞瑞,梁子卓
受保护的技术使用者:中铁十四局集团有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!