一种跨越式避障行走复合机器人设备的制作方法
本发明属于船舶甲板片体焊接设备,具体地说是一种跨越式避障行走复合机器人设备。
背景技术:
1、目前在船舶甲板片体焊接作业中,由于涉及零部件种类多样,尺寸范围较大,且船舶甲板片体或面板单元等会对传统智能焊接工作站的移动形成障碍,因此与传统智能焊接工作站的移动生产方式匹配度不高,所以行业内还由人工焊接作业为主,智能化水平急需提高。
技术实现思路
1、针对船舶甲板片体或面板单元等会对传统智能焊接工作站的移动形成障碍的问题,本发明的目的在于提供一种跨越式避障行走复合机器人设备,用于安装焊接设备主体部分。
2、本发明的目的是通过以下技术方案来实现的:
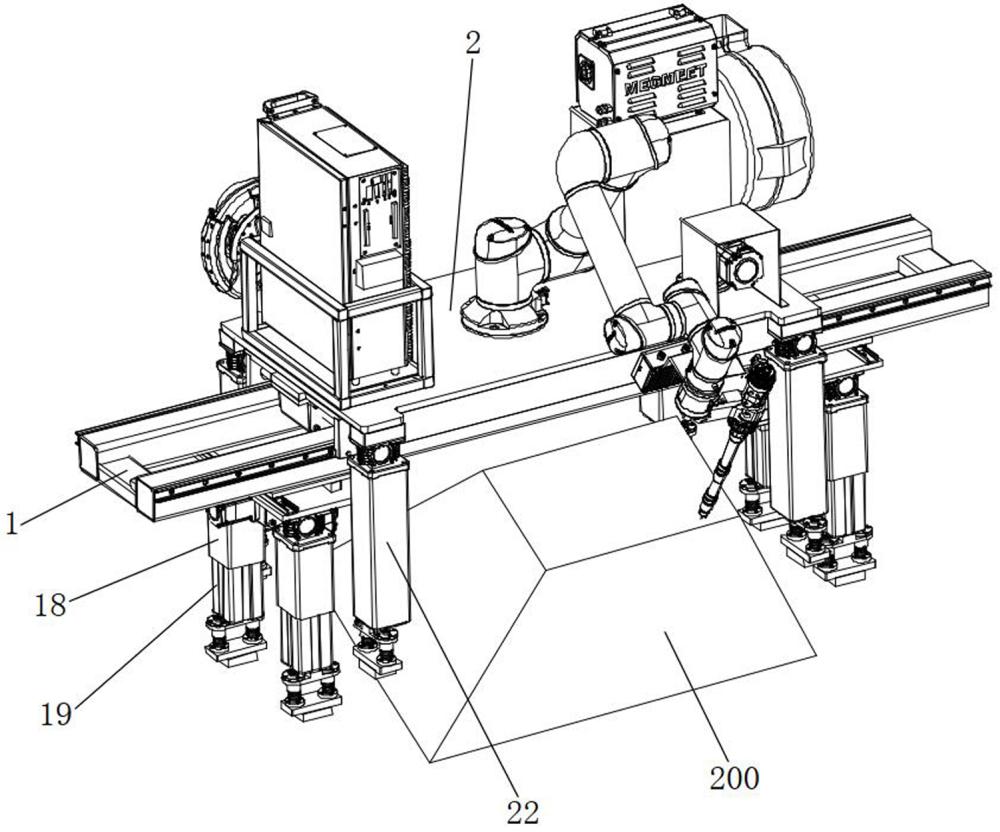
3、一种跨越式避障行走复合机器人设备,包括主机架、纵向滑台板、纵向驱动件、纵向驱动结构、横向滑台板、横向驱动件、横向驱动结构、伸缩支腿组件a、伸缩支腿组件b及电磁铁;
4、所述纵向滑台板设置于所述主机架上方、并通过所述纵向驱动结构与所述主机架连接,所述纵向驱动件与所述纵向驱动结构连接、并使所述纵向滑台板与主机架之间沿所述主机架的长度方向产生位移;
5、所述主机架的下方至少设有两个平行设置的所述横向滑台板,每个所述横向滑台板分别通过一组横向驱动结构与所述主机架连接,每个所述横向滑台板上分别安装有一个所述横向驱动件,每个所述横向驱动件分别与对应的一组所述横向驱动结构连接、并使该横向驱动件所连接的横向滑台板与主机架之间沿所述主机架的宽度方向产生位移;
6、所述纵向滑台板上设有所述伸缩支腿组件a,所述伸缩支腿组件a具有能够在所述纵向滑台板的下方上下伸缩的伸缩端,每个所述横向滑台板上分别设有所述伸缩支腿组件b,所述伸缩支腿组件b具有能够在所连接的横向滑台板的下方上下伸缩的伸缩端,所述伸缩支腿组件a的伸缩端上及所述伸缩支腿组件b的伸缩端上均设有所述电磁铁。
7、所述纵向驱动结构包括纵向齿条及纵向导轨,所述纵向齿条及纵向导轨分别安装于所述主机架上,所述纵向滑台板上与所述纵向导轨相对应处均设有纵向滑块,各所述纵向滑块分别与对应的所述纵向导轨滑动连接;所述纵向驱动件的驱动端上安装有驱动齿轮a,所述驱动齿轮a与所述纵向齿条相啮合。
8、所述纵向导轨至少设有两个,各所述纵向导轨分别位于所述纵向齿条的长度方向的两侧的位置上。
9、所述纵向齿条的长度方向及各所述纵向导轨的长度方向均平行于所述主机架的长度方向。
10、每组所述横向驱动结构均包括横向基座、横向齿条及横向导轨,每组所述横向驱动结构的横向基座均固定安装于所述主机架的底部,每组所述横向驱动结构的横向齿条安装于同组横向驱动结构的横向基座的底面上,每组所述横向驱动结构的横向导轨安装于对应的横向滑台板上,每组所述横向驱动结构的横向基座上与所述横向导轨对应处均设有横向滑块,各所述横向滑块分别与对应的所述横向导轨滑动连接;所述横向驱动件的驱动端上安装有驱动齿轮b,所述驱动齿轮b与所述横向齿条相啮合。
11、每组所述横向驱动结构的横向导轨至少设有两个,每组所述横向驱动结构的各横向导轨分别位于同组横向驱动结构的横向齿条的长度方向的两侧的位置上。
12、所有所述横向齿条的长度方向及所有所述横向导轨的长度方向均平行于所述主机架的宽度方向。
13、每个所述横向滑台板上分别设有一组所述伸缩支腿组件b,每组所述伸缩支腿组件b均包括一个伸缩驱动电机b、一个双输出轴减速机b、两个传动螺杆b、两个螺旋升降机b、两个固定外套筒b、两个伸缩内套筒b,每组所述伸缩支腿组件b的双输出轴减速机b的外壳安装于对应的所述横向滑台板上,每组所述伸缩支腿组件b的伸缩驱动电机b的外壳与同组伸缩支腿组件b的双输出轴减速机b的外壳固接,每组所述伸缩支腿组件b的伸缩驱动电机b的输出轴与同组伸缩支腿组件b的双输出轴减速机b的输入轴连接,每组所述伸缩支腿组件b的双输出轴减速机b均具有两个输出轴,每个所述双输出轴减速机b的两个输出轴分别对称位于该双输出轴减速机b的两侧、并分别与同组伸缩支腿组件b的一个传动螺杆b的一端连接,每组所述伸缩支腿组件b的螺旋升降机b分别具有外壳、动力输入端、驱动丝杆及驱动丝母,每组所述伸缩支腿组件b的各螺旋升降机b的动力输入端分别与同组伸缩支腿组件b的对应的一个传动螺杆b的另一端连接,每组所述伸缩支腿组件b的各螺旋升降机b的外壳分别与对应的横向滑台板及同组伸缩支腿组件b的对应的一个固定外套筒b的顶部连接,每组所述伸缩支腿组件b的各螺旋升降机b的驱动丝杆分别延伸至同组伸缩支腿组件b的对应的一个固定外套筒b中、并通过螺纹连接有该螺旋升降机b的驱动丝母,每组所述伸缩支腿组件b的各伸缩内套筒b的上端分别套设于同组伸缩支腿组件b的对应的一个固定外套筒b中、并与该固定外套筒b中的螺旋升降机b的驱动丝母连接,每组所述伸缩支腿组件b的伸缩内套筒b均作为该组伸缩支腿组件b的伸缩端;
14、所述纵向滑台板上至少设有两组相互平行的所述伸缩支腿组件a,每组所述伸缩支腿组件a均包括一个伸缩驱动电机a、一个双输出轴减速机a、两个传动螺杆a、两个螺旋升降机a、两个固定外套筒a、两个伸缩内套筒a,每组所述伸缩支腿组件a的双输出轴减速机a的外壳安装于所述纵向滑台板上,每组所述伸缩支腿组件a的伸缩驱动电机a的外壳与同组伸缩支腿组件a的双输出轴减速机a的外壳固接,每组所述伸缩支腿组件a的伸缩驱动电机a的输出轴与同组伸缩支腿组件a的双输出轴减速机a的输入轴连接,每组所述伸缩支腿组件a的双输出轴减速机a均具有两个输出轴,每个所述双输出轴减速机a的两个输出轴分别对称位于该双输出轴减速机a的两侧、并分别与同组伸缩支腿组件a的一个传动螺杆a的一端连接,每组所述伸缩支腿组件a的螺旋升降机a分别具有外壳、动力输入端、驱动丝杆及驱动丝母,每组所述伸缩支腿组件a的各螺旋升降机a的动力输入端分别与同组伸缩支腿组件a的对应的一个传动螺杆a的另一端连接,每组所述伸缩支腿组件a的各螺旋升降机a的外壳分别与纵向滑台板及同组伸缩支腿组件a的对应的一个固定外套筒a的顶部连接,每组所述伸缩支腿组件a的各螺旋升降机a的驱动丝杆分别延伸至同组伸缩支腿组件a的对应的一个固定外套筒a中、并通过螺纹连接有该螺旋升降机a的驱动丝母,每组所述伸缩支腿组件a的各伸缩内套筒a的上端分别套设于同组伸缩支腿组件a的对应的一个固定外套筒a中、并与该固定外套筒a中的螺旋升降机a的驱动丝母连接,每组所述伸缩支腿组件a的伸缩内套筒a均作为该组伸缩支腿组件a的伸缩端。
15、所有所述伸缩内套筒a的下端及所有所述伸缩内套筒b的下端均连接有弹簧连接座,每个所述弹簧连接座的下端分别通过若干个缓冲弹簧连接有一个电磁铁安装座,每个所述电磁铁安装座的下端与所述电磁铁连接。
16、每个所述伸缩内套筒a的外周面上均沿竖直方向设有若干个导向凹槽,每个所述固定外套筒a的内壁上与位于该固定外套筒a中的伸缩内套筒a上的各导向凹槽的对应处分别设有导向凸块,每个所述伸缩内套筒b的外周面上也均沿竖直方向开设有若干个导向凹槽,每个所述固定外套筒b的内壁上与位于该固定外套筒b中的伸缩内套筒b上的各导向凹槽的对应处分别设有导向凸块,各所述导向凸块分别伸入至对应的所述导向凹槽中。
17、本发明的优点与积极效果为:
18、本发明的跨越式避障行走复合机器人设备可以实现在甲板片体或面板单元等上纵向及横向避障行走,且通过使伸缩支腿组件a及伸缩支腿组件b伸缩能够实现跨越障碍的效果,从而可在安装焊接设备主体部分后使形成的行走及焊接机器人设备整体在整个甲板片体不受阻碍地移动,以便对甲板片体各待焊接处进行焊接,提高焊接效率,有效节省人工,智能化水平高。
- 还没有人留言评论。精彩留言会获得点赞!