一种全自动的高精密度磨床的制作方法
1.本实用新型涉及磨床技术领域,更具体的,涉及一种全自动的高精密度磨床。
背景技术:
2.在工业生产过程中,一些具有内孔的零件或外方内圆的管状的零件,在应用过程中需要对其内壁进行打磨,而现有的打磨装置,在整个打磨过程中,不能进行精准的定位,打磨易出现偏差,这就对零件造成不可逆的伤害,使零件的尺寸不精准,甚至造成零件报废。因此设计一种全自动的高精密度磨床解决上述问题。
技术实现要素:
3.本实用新型旨在于解决上述背景中提出的提出问题,从而提供一种全自动的高精密度磨床。
4.为实现上述目的,本实用新型提供如下技术方案:一种全自动的高精密度磨床,包括台面、支撑腿、t型轨道、滑块、第一电动伸缩杆、凹形支架和第二电动伸缩杆,所述台面的底部表面四个角落均焊接设置有支撑腿,所述台面的上表面左侧焊接设置有t型轨道,所述 t型轨道的上方嵌入设置有滑块,所述滑块的底部表面嵌入设置有t 型槽,所述t型轨道的上表面左侧焊接设置有第一电动伸缩杆,所述第一电动伸缩杆的输出端焊接于滑块的左侧表面上方,所述滑块的上表面焊接设置有凹形支架,所述凹形支架的上表面中央通过螺栓固定设置有第二电动伸缩杆,所述凹形支架的内部嵌入设置有打磨装置,所述台面的上表面右侧通过螺栓固定设置有电动液压缸,所述电动液压缸的输出端焊接设置有活动板,所述活动板的左侧表面中央焊接设置有工件固定管;
5.所述打磨装置包括有工字型块、电机安装块、旋转电机、旋转杆、细打磨盘、粗打磨盘和红外线发射器,所述工字型块的右侧表面焊接设置有电机安装块,所述电机安装块的上表面通过螺栓固定设置有旋转电机,所述旋转电机的输出端焊接设置有旋转杆,所述旋转杆的外表面左侧固定设置有细打磨盘,所述旋转杆的右侧固定设置有粗打磨盘,所述旋转杆的右侧表面中央通过螺栓固定设置有红外线发射器;
6.所述工件固定管包括有电磁块、贯穿孔和红外线接收板,所述工件固定管的内部表面中央固定设置有电磁块,所述电磁块的中央贯穿设置有贯穿孔,所述工件固定管的内部表面右侧固定设置有红外线接收板。
7.优选的,所述台面的底部表面固定设置有控制器,且控制器、第一电动伸缩杆、第二电动伸缩杆、旋转电机、红外线发射器、电磁块、红外线接收板和电动液压缸均通过电线与外部电源呈电性连接。
8.优选的,所述第一电动伸缩杆、第二电动伸缩杆、旋转电机、红外线发射器和电动液压缸与控制器均呈电性连接,且控制器上设置有第一电动伸缩杆、第二电动伸缩杆、旋转电机、红外线发射器、电磁块和电动液压缸所用的开关。
9.优选的,所述t型轨道贯穿于t型槽内。
10.优选的,所述第二电动伸缩杆的输出端焊接于工字型块的上表面。
11.有益效果:该种全自动的高精密度磨床设置有红外线发射器和红外线接收器,需要打磨时,通过将需要打磨的工件放置于工件固定管内,而通过开启电磁块使得电磁块将需要打磨的工件固定于工件固定管内,而通过开启红外线发射器,使得红外线发射器发射出红外线,通过开启第一电动伸缩杆,使得滑块带动凹形支架往右侧移动,通过开启第二电动伸缩杆,使得第二电动伸缩杆带动打磨装置上下移动,从而使得旋转电机和红外线发射器上线上下移动,当红外线发射器发射出的红外线从贯穿孔处照射到红外线接收板上后,发处信号给控制器,控制器控制第二电动伸缩杆停止运动,达到精准定位加工件的效果,同时控制电动液压缸开启,使得电动液压缸带动活动板往左侧移动,旋转电机开启,使得旋转电机带动粗打磨盘和细打磨盘旋转,对工件进行打磨。
附图说明
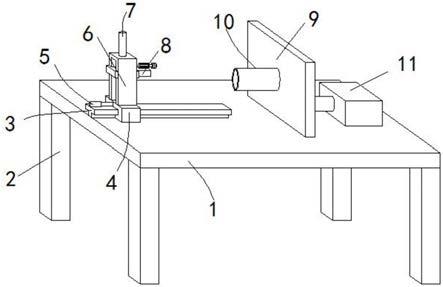
12.图1为本实用新型的整体结构示意图。
13.图2为本实用新型的滑块构结构示意图。
14.图3为本实用新型的打磨装置结构示意图。
15.图4为本实用新型的工件固定管结构示意图。
16.图1
‑
4中:1
‑
台面,2
‑
支撑腿,3
‑
t型轨道,4
‑
滑块,401
‑
t型槽,5
‑
第一电动伸缩杆,6
‑
凹形支架,7
‑
第二电动伸缩杆,8
‑
打磨装置,801
‑
工字型块,802
‑
电机安装块,803
‑
旋转电机,804
‑
旋转杆, 805
‑
细打磨盘,806
‑
粗打磨盘,807
‑
红外线发射器,9
‑
活动板,10
‑ꢀ
工件固定管,1001
‑
电磁块,1002
‑
贯穿孔,1003
‑
红外线接收板。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.请参阅图1至4,本实用新型实施例中,一种全自动的高精密度磨床,包括台面1、支撑腿2、t型轨道3、滑块4、第一电动伸缩杆 5、凹形支架6和第二电动伸缩杆7,台面1的底部表面四个角落均焊接设置有支撑腿2,台面1的上表面左侧焊接设置有t型轨道3,t 型轨道3的上方嵌入设置有滑块4,滑块4的底部表面嵌入设置有t 型槽401,t型轨道3的上表面左侧焊接设置有第一电动伸缩杆5,第一电动伸缩杆5的输出端焊接于滑块4的左侧表面上方,滑块4的上表面焊接设置有凹形支架6,凹形支架6的上表面中央通过螺栓固定设置有第二电动伸缩杆7凹形支架6的内部嵌入设置有打磨装置8,台面1的上表面右侧通过螺栓固定设置有电动液压缸11,电动液压缸11的输出端焊接设置有活动板9,活动板9的左侧表面中央焊接设置有工件固定管10;
19.打磨装置8包括有工字型块801、电机安装块802、旋转电机803、旋转杆804、细打磨盘805、粗打磨盘806和红外线发射器807,工字型块801的右侧表面焊接设置有电机安装块802,电机安装块802 的上表面通过螺栓固定设置有旋转电机803,旋转电机803的输出端焊接设置有旋转杆804,旋转杆804的外表面左侧固定设置有细打磨盘805,旋转杆804的右侧
固定设置有粗打磨盘806,旋转杆804的右侧表面中央通过螺栓固定设置有红外线发射器807;
20.工件固定管10包括有电磁块1001、贯穿孔1002和红外线接收板1003,工件固定管10的内部表面中央固定设置有电磁块1001,电磁块1001的中央贯穿设置有贯穿孔1002,工件固定管10的内部表面右侧固定设置有红外线接收板1003。
21.本实施例中,台面1的底部表面固定设置有控制器,且控制器、第一电动伸缩杆5、第二电动伸缩杆7、旋转电机803、红外线发射器807、电磁块1001、红外线接收板1003和电动液压缸11均通过电线与外部电源呈电性连接,使得外部电源为控制器、第一电动伸缩杆 5、第二电动伸缩杆7、旋转电机803、红外线发射器807、电磁块1001、红外线接收板1003和电动液压缸11提供电源。
22.本实施例中,第一电动伸缩杆5、第二电动伸缩杆7、旋转电机 803、红外线发射器807和电动液压缸11与控制器均呈电性连接,且控制器上设置有第一电动伸缩杆5、第二电动伸缩杆7、旋转电机803、红外线发射器807、电磁块1001和电动液压缸11所用的开关,使得控制器可控制第一电动伸缩杆5、第二电动伸缩杆7、旋转电机803、红外线发射器807、电磁块1001和电动液压缸11的开启和关闭。
23.本实施例中,t型轨道3贯穿于t型槽401内,方便滑块沿着t 型轨道3左右滑动。
24.本实施例中,第二电动伸缩杆7的输出端焊接于工字型块801的上表面,使得第二电动伸缩杆7可带动打磨装置8上下移动。
25.在使用本实用新型一种全自动的高精密度磨床时,首先将装置好,需要打磨时,通过将需要打磨的工件放置于工件固定管10内,而通过开启电磁块1001使得电磁块1001将需要打磨的工件固定于工件固定管10内,而通过开启红外线发射器807,使得红外线发射器807 发射出红外线,通过开启第一电动伸缩杆5,使得滑块4带动凹形支架6往右侧移动,通过开启第二电动伸缩杆7,使得第二电动伸缩杆 7带动打磨装置8上下移动,从而使得旋转电机803和红外线发射器 807上线上下移动,当红外线发射器807发射出的红外线从贯穿孔 1002处照射到红外线接收板1003上后,发处信号给控制器,控制器控制第二电动伸缩杆7停止运动,达到精准定位加工件的效果,同时控制电动液压缸11开启,使得电动液压缸11带动活动板9往左侧移动,旋转电机803开启,使得旋转电机803带动粗打磨盘806和细打磨盘805旋转,对工件进行打磨。
26.以上的仅是本实用新型的优选实施方式,应当指出,对于本领域的技术人员来说,在不脱离本实用新型构思的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1