成膜装置以及成膜方法与流程
1.本发明涉及成膜装置以及成膜方法。
背景技术:
2.公知有具有用于对处理容器内的压力进行测定的压力传感器的成膜装置(例如,参照专利文献1、2)。另外,公知有在处理容器内于载置台和喷头之间形成扩散空间,使气体的置换性提高而进行处理的原子层沉积(ald:atomic layer deposition)装置(例如,参照专利文献3)。
3.《现有技术文献》
4.《专利文献》
5.专利文献1:日本国特开2002-241943号公报
6.专利文献2:日本国特开2013-040398号公报
7.专利文献3:日本国特开2015-175060号公报
技术实现要素:
8.《本发明要解决的问题》
9.本发明提供一种能够以高精度检测基板附近的压力的技术。
10.《用于解决问题的手段》
11.根据本发明的一个方式的成膜装置具有:处理容器,其能够对内部进行减压;喷头,其用于向上述处理容器内供给气体,该喷头包括形成有多个气体孔的下部件、以及在与该下部件之间形成用于使上述气体扩散的扩散空间的上部件;载置台,其与上述喷头相对配置,并且在与上述喷头之间形成处理空间;升降机构,其用于使上述载置台进行升降;筒状部,其贯通上述喷头而与上述处理空间连通;以及压力传感器,其以气密的方式设于上述筒状部的内部,用于对上述处理空间的压力进行测定。
12.《发明的效果》
13.根据本发明,能够以高精度检测基板附近的压力。
附图说明
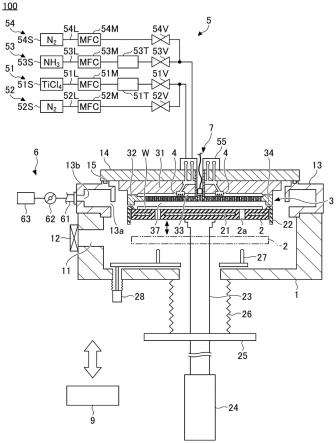
14.图1是示出第一实施方式的成膜装置的一个例子的剖视图。
15.图2是示出图1的成膜装置的喷头的剖视图。
16.图3是示出图1的成膜装置的喷头的立体图。
17.图4是示出图1的成膜装置的气体供给部的立体图。
18.图5是示出图1的成膜装置的气体供给部的纵剖视图。
19.图6是自下方观察图1的成膜装置的喷头的图。
20.图7是示出第一实施方式的成膜方法的一个例子的图。
21.图8是示出第二实施方式的成膜装置的喷头的剖视图。
22.图9是示出第二实施方式的成膜装置的喷头的平面图。
23.图10是示出处理容器内的压力的时间变化的图。
24.图11是示出ticl4分压的时间变化的图。
25.图12是示出台阶覆盖性与ticl4分压的关系的图。
具体实施方式
26.以下,参照附图,对本发明举例示出的非限定的实施方式进行说明。在全部附图中,对于相同或对应的部件或零件,付与相同或对应的参照附图标记,省略重复的说明。
27.〔第一实施方式〕
28.(成膜装置)
29.参照图1~图6,对第一实施方式的成膜装置的一个例子进行说明。第一实施方式的成膜装置构成为能够实施基于原子层沉积(ald:atomic layer deposition)法的成膜的装置。
30.成膜装置100具有处理容器1、载置台2、喷头3、气体供给部4、气体导入部5、排气部6、压力测定部7、以及控制部9等。
31.处理容器1是能够对内部进行减压的真空容器。处理容器1由铝等的金属构成,其具有大致圆筒状。处理容器1用于容纳基板的一个例子即半导体晶圆(以下称为“晶圆w”。)。在处理容器1的侧壁上形成有用于将晶圆w搬入或搬出的搬入搬出口11。搬入搬出口11通过门阀12进行开闭。在处理容器1的主体之上,设有剖面呈矩形的圆环状的排气管道13。在排气管道13中,沿内周面形成有缝隙13a。在排气管道13的外壁形成有排气口13b。在排气管道13的上表面以封闭处理容器1的上部开口的方式设有顶板部件14。排气管道13和顶板部件14之间被密封环15气密密封。
32.载置台2在处理容器1内将晶圆w支承为水平。载置台2具有比晶圆w大的圆板状,其由氮化铝(aln)等的陶瓷材料、铝、镍合金等的金属材料构成。在载置台2的内部埋入有用于对晶圆w进行加热的加热器21。加热器21由加热器电源(未图示)供电而发热。并且,通过设于载置台2的上表面的附近的热电偶(为图示)的温度信号来控制加热器21的输出,从而将晶圆w控制为规定的温度。在载置台2中以覆盖上表面的外周区域以及侧面的方式设有由氧化铝等的陶瓷形成的罩部件22。
33.载置台2被支承部件23支承。支承部件23自载置台2的底面中央贯通形成于处理容器1的底壁的孔部而向处理容器1的下方延伸,其下端与升降机构24连接。载置台2通过升降机构24而在图1所示的处理位置与其下方的双点划线所示的可输送晶圆w的输送位置之间进行升降。在支承部件23的位于处理容器1的下方安装有凸缘部25。在处理容器1的底面和凸缘部25之间设有波纹管26。波纹管26将处理容器1内的氛围气和外部气体划分,其随着载置台2的升降动作而进行伸缩。
34.在处理容器1的底面附近,以自升降板向上方突出的方式设有三根(仅图示了两根)晶圆支承销27。晶圆支承销27通过设于处理容器1的下方的升降机构28而借助升降板进行升降。晶圆支承销27插入设于位于输送位置的载置台2的贯通孔2a,从而能够相对于载置台2的上表面突出没入。通过使晶圆支承销27进行升降,在输送机器人(未图示)与载置台2之间进行晶圆w的交接。
35.喷头3用于在处理容器1内以淋浴状供给处理气体。喷头3由例如金属材料形成,其与载置台2相对配置。喷头3具有与载置台2大致相同直径。喷头3包括上部件31以及下部件32。上部件31固定于顶板部件14的下表面。下部件32连接于上部件31之下。在上部件31和下部件32之间,形成有用于使气体扩散的扩散空间33。在扩散空间33中以贯通顶板部件14以及上部件31的方式设有气体导入路36。气体自气体导入部5经由后述进气块55被导入气体导入路36。在下部件32的周缘部以向下方突出的方式形成有环状突起部34。下部件32中的环状突起部34的内侧的平坦面中形成有许多的气体孔35。在载置台2移动至处理位置的状态下,在载置台2与下部件32之间形成狭小的处理空间37,罩部件22的上表面与环状突起部34接近而形成环状间隙38。
36.许多的气体孔35包括多个倾斜孔35a以及多个未倾斜孔35b。多个倾斜孔35a配置于后述筒状部71的周围,其自扩散空间33一侧朝向处理空间37一侧向筒状部71的中心方向倾斜。优选多个倾斜孔35a配置为越接近筒状部71的中心倾斜角越大。由此,气体也向未配置气体孔35的筒状部71的下方喷出,从而面内均匀性提高。多个未倾斜孔35b配置于多个倾斜孔35a的周围,其自扩散空间33一侧朝向处理空间37一侧不具有倾斜。
37.气体供给部4在扩散空间33内例如设有八个。八个气体供给部4配置为圆环状地等间隔包围喷头3的中心。需要说明的是,设于扩散空间33内的气体供给部4的个数不限于八个的情况。例如只要至少两个、优选三个以上的气体供给部4设于包围喷头3的中心的环上的彼此离开的位置,则能够以短时间在喷头3内均匀地供给气体。需要说明的是,多个气体供给部4所设置的环的形状不限于圆环,例如可以配置于四边形的环上。
38.如图4以及图5所示,各气体供给部4具有紧固于上部件31的台座部43、以及设于台座部43的下表面侧且内部为中空的头部41。在上部件31的下表面形成供台座部43插入的凹部,使台座部43嵌合于该凹部内时,头部41成为自上部件31的下表面向扩散空间33内突出的状态。
39.在台座部43中形成螺纹孔43a,通过使螺钉43b与螺纹孔43a以及形成于上部件31侧的凹部内的螺纹孔螺纹结合,从而台座部43相对于上部件31被紧固。
40.若处理气体进入台座部43和上部件31之间而形成膜,并且台座部43以及上部件31被固定在一起,则成为在拆下气体供给部4等时产生颗粒的原因。于是,本例子的台座部43成为能够抑制这样的颗粒的产生的构成。
41.如图5所示,台座部43形成为比上部件31侧的凹部小一圈,在台座部43的外周面和上部件31侧的凹部的内周面之间形成例如约0.1~1mm的间隙31a。另外,朝向上部侧突出的扁平的环状的突部43c在台座部43中的螺纹孔43a的上端部突出。台座部43通过该突部43c的上表面侧的接触面与上部件31接触,在台座部43的上表面和上部件31侧的凹部的下表面之间也形成与侧面侧相同程度的间隙31a。
42.进一步在台座部43中以在上下方向贯通台座部43的方式,形成有与在上部件31中形成的气体导入路36连通的气体路43d。在气体路43d的上端侧的开口部的周围,设有将气体导入路36和气体路43d气密连接的密封部件即o型环43e。
43.其结果,与上部件31接触的部分被限定为突部43c的上表面侧的接触面以及o型环43e,在其他部分处,在台座部43和上部件31之间形成相对较大的间隙31a。因此,即使处理气体进入台座部43和上部件31而形成膜,台座部43与上部件31也难以被固定在一起。其结
果,能够抑制拆下气体供给部4时等的颗粒的产生。
44.另外,与上部件31接触的部分被限定为突部43c的上表面侧的接触面、以及o型环43e,这些接触部分设于距反应气体进入的位置较远的台座部43的上表面侧。因此,反应气体难以进入突部43c的接触面、o型环43e和上部件31之间。另外,即使进入其面积也较小。其结果,能够抑制拆下气体供给部4等时的颗粒的产生。
45.头部41以自台座部43的下表面侧覆盖气体路43d的下端侧的开口部的方式设置,其是例如直径为8~20mm的范围内的例如20mm的扁平的圆筒形状的罩。在头部41的侧面,形成有沿周向隔开间隔设置的多个气体喷出口42。优选气体喷出口42相对于各头部41设置例如三个以上,在本例中设有十二个。另外,由于头部41的下表面被封闭而未设置气体喷出口42,因此流入头部41内的气体以自各气体喷出口42朝向横向均匀扩散的方式被喷出。
46.如上所述,气体供给部4构成为能够使气体朝向周向均匀扩散。自这些气体供给部4的气体喷出口42喷出的气体在喷头3内充分扩散后经由气体孔35被供给至处理空间37。由此,气体被均匀地供给至载置台2之上的晶圆w的表面。
47.气体导入部5将各种气体供给至喷头3。气体导入部5具有原料气体供给部51、第一吹扫气体供给部52、氮化气体供给部53、第二吹扫气体供给部54以及进气块55。
48.原料气体供给部51包括原料气体源51s、气体供给管线51l、流量控制器51m、储存容器51t以及阀51v。原料气体源51s经由气体供给管线51l将原料气体的一个例子即氯化钛气体(ticl4)供给至处理容器1内。气体供给管线51l是自原料气体源51s延伸的管线。气体供给管线51l与进气块55连接。在气体供给管线51l中,自原料气体源51s侧依次设有流量控制器51m、储存容器51t以及阀51v。流量控制器51m控制流过气体供给管线51l的ticl4的流量。流量控制器51m例如为质量流量控制器(mfc:mass flow controller)。储存容器51t用于临时储存ticl4。通过设置储存容器51t,能够在处理容器1内以短时间供给大流量的ticl4。储存容器51t也被称为缓冲容器、填充容器(日文原文:
フイルタンク
)。阀51v是用于在ald时切换气体的供给和停止的阀。阀51v是例如能够高速开闭的ald阀。优选ald阀能够以0.01秒~1.0秒的间隔进行开闭。
49.第一吹扫气体供给部52包括吹扫气体源52s、气体供给管线52l、流量控制器52m以及阀52v。吹扫气体源52s经由气体供给管线52l将吹扫气体的一个例子即氮气(n2)供给至处理容器1内。气体供给管线52l是自吹扫气体源52s延伸的管线。气体供给管线52l与气体供给管线51l连接。在气体供给管线52l中,自吹扫气体源52s侧依次设有流量控制器52m以及阀52v。流量控制器52m控制流过气体供给管线52l的n2的流量。流量控制器52m为例如质量流量控制器。阀52v是用于在ald时切换气体的供给和停止的阀。阀52v为例如能够以高速进行开闭可能的ald阀。优选ald阀能够以0.01秒~1.0秒的间隔进行开闭。
50.氮化气体供给部53包括氮化气体源53s、气体供给管线53l、流量控制器53m、储存容器53t以及阀53v。氮化气体源53s经由气体供给管线53l将氮化气体的一个例子即氨气(nh3)供给至处理容器1内。气体供给管线53l是自氮化气体源53s延伸的管线。气体供给管线53l与进气块55连接。在气体供给管线53l中,自氮化气体源53s侧依次设有流量控制器53m、储存容器53t以及阀53v。流量控制器53m控制流过气体供给管线53l的nh3的流量。流量控制器53m为例如质量流量控制器。储存容器53t用于临时储存nh3。通过设置储存容器53t,能够向处理容器1内以短时间供给大流量的nh3。储存容器53t也被称为缓冲容器、填充容
器。阀53v是用于在ald时切换气体的供给和停止的阀。阀53v为例如能够以高速进行开闭可能的ald阀。优选ald阀能够以0.01秒~1.0秒的间隔进行开闭。
51.第二吹扫气体供给部54包括吹扫气体源54s、气体供给管线54l、流量控制器54m以及阀54v。吹扫气体源54s经由气体供给管线54l将吹扫气体的一个例子即氮气(n2)供给至处理容器1内。气体供给管线54l是自吹扫气体源54s延伸的管线。气体供给管线54l与气体供给管线53l连接。在气体供给管线54l中,自吹扫气体源54s侧依次设置流量控制器54m以及阀54v。流量控制器54m控制流过气体供给管线54l的n2的流量。流量控制器54m为例如质量流量控制器。阀54v是用于在ald时切换气体的供给和停止的阀。阀54v为例如能够以高速进行开闭可能的ald阀。优选ald阀能够以0.01秒~1.0秒的间隔进行开闭。
52.进气块55具有内部为中空的圆筒形状,其设于顶板部件14之上。进气块55配置于顶板部件14的中心。在进气块55的内部形成有气体流路55a。气体流路55a与气体供给管线51l、53l以及气体导入路36连通,其将自气体供给管线51l、53l供给的气体向气体导入路36进行供给。
53.排气部6通过对处理容器1的内部进行排气,对该处理容器1内进行减压。排气部6包括排气配管61、压力控制器62以及真空泵63。排气配管61与排气口13b连接。压力控制器62设于排气配管61。压力控制器62可以为例如通过调整开度来控制排气配管61内的电导的阀。真空泵63设于排气配管61。
54.压力测定部7包括筒状部71以及压力传感器72。筒状部71具有内部为中空的圆筒形状。筒状部71在厚度方向贯通顶板部件14以及喷头3而与处理空间37连通。筒状部71设于顶板部件14的中心。由此,在俯视中,筒状部71的中空部与进气块55的中空部连通。压力传感器72设于筒状部71的内部,其用于对处理空间37的压力进行测定。压力传感器72将测定值发送至控制部9。
55.控制部9通过成膜装置100的各部分的动作的控制,实施后述成膜方法。控制部9可以为例如计算机等。用于进行成膜装置100的各部分的动作的计算机的程序存储于存储介质中。存储介质可以为例如软盘、光盘、硬盘、闪存、dvd等。
56.但是,以往在减压cvd装置、减压ald装置中,为了测定处理容器内的压力,将电容压力计等的压力传感器设置于处理容器的侧壁,进行压力测定。但是,如上述成膜装置100那样在处理容器1内在载置台2和喷头3之间形成狭小的处理空间37,使气体的置换性提高而进行处理的ald装置中,不能测定处理空间37的正确的压力。因此,由于为了确保工艺性能,必须改变条件,多次试行工艺,从而难以确保工艺性能。
57.与此相对,根据实施方式的成膜装置100,具有贯通喷头3而与处理空间37连通的筒状部71、以及气密地设于该筒状部71的内部而用于对处理空间37的压力进行测定的压力传感器72。由此,能够以高精度测定处理空间37的压力、即晶圆w附近的压力。
58.(成膜方法)
59.参照图7,对实施方式的成膜方法的一个例子进行说明。实施方式的成膜方法具有搬入工序、成膜工序以及搬出工序。
60.在搬入工序中,将晶圆w搬入处理容器1内。在搬入工序中,在使载置台2下降至输送位置的状态下打开门阀12,通过输送机器人(未图示)将晶圆w经由搬入搬出口11搬入处理容器1内,并且将其载置于被加热器21加热至规定温度的载置台2之上。接下来,使载置台
2上升至处理位置,使处理容器1内减压至规定压力。
61.成膜工序在搬入工序之后进行。在成膜工序中,将包括ticl4供给步骤、ticl4吹扫步骤、nh3供给步骤以及nh3吹扫步骤的一系列的动作作为一个循环,通过控制循环数,形成期望的膜厚的氮化钛(tin)膜。
62.ticl4供给步骤是将ticl4供给至处理空间37的步骤。在ticl4供给步骤中,首先,打开阀52v、54v,自吹扫气体源52s、54s经由气体供给管线52l、54l持续供给n2气体。另外,通过打开阀51v,自原料气体供给部51经由气体供给管线51l将ticl4供给至处理空间37。此时,ticl4暂时存储于储存容器51t后被供给至处理容器1内。另外,在ticl4供给步骤中,控制部9通过基于压力传感器72的测定值来控制压力控制器62,从而将处理空间37内控制为期望的压力。
63.ticl4吹扫步骤是对处理空间37的剩余的ticl4等进行吹扫的步骤。在ticl4吹扫步骤中,在持续经由气体供给管线52l、54l的n2气体的供给的状态下,关闭阀51v,停止自气体供给管线51l的ticl4的供给。
64.nh3供给步骤是将nh3气体供给至处理空间37的步骤。在nh3供给步骤中,在持续经由气体供给管线52l、54l的n2气体的供给的状态下,打开阀53v。由此,自氮化气体源53s经由气体供给管线53l将nh3气体供给至处理空间37。此时,nh3在临时储存于储存容器53t后被供给至处理容器1内。通过nh3供给步骤,吸附于晶圆w之上的ticl4被还原。此时的nh3的流量可以设定为充分进行还原反应的量。另外,在nh3供给步骤中,控制部9基于压力传感器72的测定值控制压力控制器62,从而将处理空间37内控制为期望的压力。
65.nh3吹扫步骤是对处理空间37的剩余的nh3进行吹扫的步骤。在nh3吹扫步骤中,在持续经由气体供给管线52l、54l的n2气体的供给的状态下,关闭阀53v,停止自气体供给管线53l的nh3的供给。
66.将包括以上说明的ticl4供给步骤、ticl4吹扫步骤、nh3供给步骤以及nh3吹扫步骤的一系列的动作作为一个循环,通过控制循环数,能够形成期望的膜厚的tin膜。
67.搬出工序在成膜工序结束后执行。在搬出工序中,在使载置台2下降至输送位置的状态下打开门阀12,通过输送机器人(未图示)将晶圆w经由搬入搬出口11搬出至处理容器1外。
68.另外,在存在接下来要处理的晶圆w的情况下,在搬出工序之后,再次返回搬入工序,执行成膜工序以及搬出工序。由此,对于下一个晶圆w,能够形成期望的膜厚的tin膜。
69.根据以上说明的实施方式的成膜方法,基于在贯通喷头3而与处理空间37连通的筒状部71的内部气密地设置的压力传感器72的测定值,对压力控制器62进行控制,从而将处理空间37内控制为期望的压力。由此,能够以较高的精度控制晶圆w附近的压力,从而能够容易地实现期望的工艺性能。
70.需要说明的是,在图2所示例子中,虽然在压力传感器72和喷头3的与晶圆w相对的面之间存在死角(dead space)73,但是从抑制气体的滞留/残留的观点出发,优选以压力传感器72和喷头3的与晶圆w相对的面成为同一面的方式,对压力传感器72进行配置。
71.〔第二实施方式〕
72.参照图8以及图9,对第二实施方式的成膜装置的一个例子进行说明。图8是示出第二实施方式的成膜装置的喷头的一个例子的概略剖视图。图9是示出第二实施方式的成膜
装置的喷头的一个例子的概略俯视图。需要说明的是,图8示出了在图9中的点划线viii-viii处进行切断的剖面。
73.如图8以及图9所示,第二实施方式的成膜装置100a在于进气块55之上设有阀51v~54v这点与第一实施方式的成膜装置100不同。需要说明的是,对于其他的构成,可以为与第一实施方式的成膜装置100相同的构成。
74.根据第二实施方式的成膜装置100a,由于在处理空间37的附近设有阀51v~54v,因此能够缩短在打开阀51v~54v后直至处理气体被供给至处理空间37为止的时间间隔(时间迟延)。而且由于能够缩短自阀51v~54v至处理空间37的距离,因此能够减少在关闭阀51v~54v后残留于阀51v~54v的二次侧的气体流路内的气体的量。其结果,能够在短时间内顺利地进行ald工艺中的气体的切换。
75.〔实施例〕
76.在实施例中,对通过上述实施方式的成膜方法形成tin膜时的、改变ticl4的供给时刻时的ticl4分压进行了比较。
77.在ald工艺中,一边以高速切换气体、处理容器1内的压力,一边进行成膜,由于需要在处理容器1内的压力变动(脉动)时对气体进行供给,因此向反应区域(处理空间37)供给的原料气体(ticl4)的压力也易于变得不稳定。
78.图10是示出处理容器1内的压力的时间变化的图。图10中,横轴表示时间(秒),纵轴表示处理容器1内的压力(torr)。图11是示出ticl4分压的时间变化的图。图11中,横轴表示时间(秒),纵轴表示ticl4分压(torr)。在图10以及图11中,实线、虚线以及点划线表示在处理容器1内的压力分别为1.5torr(200pa)、3.0torr(400pa)以及5.0torr(667pa)的时刻向处理容器1内供给ticl4时的结果。
79.如图10以及图11所示,在处理容器1内的压力变动时对原料气体(ticl4)进行供给的情况下,可知仅通过监视处理容器1内的压力难以唯一地求出原料气体(ticl4)分压。因此,认为在喷头中设置压力传感器,测定基板附近的压力,对于获知ticl4分压是重要的。
80.图12是示出台阶覆盖性与ticl4分压的关系的图。图12中,横轴表示在形成有包括凹部的图案的图案基板上形成tin膜时的台阶覆盖性(%),纵轴表示ticl4分压(torr)。
81.如图12所示,可知台阶覆盖性与ticl4分压之间存在正的相关。自该结果,可以说通过提高ticl4分压,能够提高台阶覆盖性。
82.自以上结果,可以说在喷头中设置压力传感器,测定基板附近的压力,对于把握工艺性能(例如台阶覆盖性)是重要的。
83.应认为本发明的实施方式的全部的点为例示,不进行限制。上述实施方式在不超出附上的权利要求书及其主旨的范围内,可以以各种方式进行省略、置换、变更。
84.在上述实施方式中,对于筒状部以及压力传感器设于喷头的中心的情况进行了说明,但是本发明不限于此。例如,筒状部以及压力传感器可以设于喷头的中心之外。另外,例如筒状部以及压力传感器可以设于喷头的面内的多个位置。由此,能够对基板面内的压力分布进行测定。
85.在上述实施方式中,虽然对于交替间歇供给ticl4气体以及nh3气体而形成tin膜的ald装置进行了说明,但是本发明不限于此,本发明也可以应用于利用其他的气体而形成其他的膜的ald装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1