一种铅酸蓄电池智能全自动铸焊机械手机构的制作方法
1.本实用新型涉及机械手技术领域,具体为一种铅酸蓄电池智能全自动铸焊机械手机构。
背景技术:
2.铅酸电池,是一种电极主要由铅及其氧化物制成,电解液是硫酸溶液的蓄电池。铅酸电池放电状态下,正极主要成分为二氧化铅,负极主要成分为铅;充电状态下,正负极的主要成分均为硫酸铅。
3.中国专利授权公众号cn211840100u,公告日2020-11-03,公开了一种铅酸蓄电池智能全自动铸焊生产线,其包括输入线、至少一组切刷设备及至少一组铸焊设备,输入线用于输入待铸焊的铅酸电池,其上的输出工位与邻设的切刷设备上的进料工位正对设置,切刷设备的出料工位处邻设有对应的铸焊设备,其通过利用切刷设备、第二抓料机械手、输送线及中转机械手的相互配合,对铅酸电池进行转移输送与切刷加工,并且实现对多组的铸焊机交替进行自动上料与卸料工作,解决现有铅酸电池自动加工过程中,加工效率低的技术问题。本发明详细记载了一种铅酸蓄电池智能全自动铸焊的生产线,里面使用机械手夹持电池包,用以加工铅酸蓄电池。
4.在上述的现有技术方案中存在以下缺陷,上述技术方案中,机械手直接使用,电池包在生产过程中,可能会发生泄漏事件,泄漏出的电解液具有强腐蚀性,在机械手与泄漏的电池包进行接触时,机械手表面残留电解质溶液,清洗不便,导致表面被电解质溶液进行腐蚀。为此,我们提供一种铅酸蓄电池智能全自动铸焊机械手机构,以解决上述问题。
技术实现要素:
5.本实用新型的目的在于提供一种铅酸蓄电池智能全自动铸焊机械手机构,以解决上述背景技术中提出的机械手直接使用,电池包在生产过程中,可能会发生泄漏事件,泄漏出的电解液具有强腐蚀性,在机械手与泄漏的电池包进行接触时,机械手表面残留电解质溶液,清洗不便,导致表面被电解质溶液进行腐蚀的问题。
6.为实现上述目的,本实用新型提供如下技术方案:一种铅酸蓄电池智能全自动铸焊机械手机构,包括:
7.翻转壳体,所述翻转壳体的内部固定安装有翻转电机;
8.夹持臂,其转动安装在所述翻转壳体的右侧,所述夹持臂的两侧对称设有两个清洗罐,所述夹持臂的右侧开设有滑槽;
9.安装底座,其固定安装在所述翻转壳体的左侧。
10.优选的,所述输送架还设有:
11.转动电机,其固定安装在所述输送架的后方一侧;
12.第二电缸,其设置在所述输送架的中部下方一侧。
13.优选的,所述夹持臂还设有:
14.夹持气缸,其固定安装在所述夹持臂的内部;
15.夹持头,其对称设置在所述夹持气缸的上下两侧,所述夹持头与所述滑槽的形状相互吻合。
16.优选的,所述夹持头还设有:
17.防腐夹持件,其对称活动连接在所述夹持头靠近所述夹持臂竖直中心线的一侧,所述防腐夹持件的两侧对称设有若干个夹持件卡块,所述防腐夹持件设为四氟乙烯材质。
18.优选的,所述清洗罐还设有:
19.连接管,其固定连接在所述清洗罐的一侧,所述连接管从所述防腐夹持件的中轴线穿出。
20.优选的,所述清洗罐还设有:
21.搅拌电机,其固定安装在所述清洗罐的内部;
22.搅拌轴,其键连接在所述搅拌电机的右侧;
23.搅拌扇,其呈螺旋状设置在所述搅拌轴的外表面。
24.优选的,所述翻转电机还设有:
25.旋转轴,其设置在所述翻转电机的右侧,所述翻转壳体的右端穿出有所述旋转轴。
26.优选的,所述安装底座还设有:
27.滑动丝杆,其螺纹连接在所述安装底座的内部,所述滑动丝杆与所述安装底座连接处的两端均设有轴承,所述轴承固定嵌入在所述安装底座上。
28.与现有技术相比,本实用新型提供了一种铅酸蓄电池智能全自动铸焊机械手机构,具备以下有益效果:该铅酸蓄电池智能全自动铸焊机械手机构,可以对铸焊机械手进行清洁,能够避免铸焊机械手在对电池包进行夹持时,电池包发生泄漏,将电解液滴落在铸焊机械手表面,导致铸焊机械手发生腐蚀,并且能够对粘附在表面的电解液进行中和。
29.1.本实用新型通过夹持气缸能够带动夹持头向内进行移动,从而可使夹持头夹持电池包,对电池包进行移动;通过设置的防腐夹持件,采用四氟乙烯材质,与电池包接触时,能够避免电池包与机械手表面进行接触,同时电池包如果发生泄漏,硫酸与防腐夹持件进行接触,能够大大降低硫酸对机械手的腐蚀;
30.2.本实用新型通过设置的清洗罐,能够将清洁液从连接管处流出,中和防腐夹持件表面粘附的硫酸溶液,清洁液采用小苏打溶液,与硫酸进行中和,产生无毒的二氧化碳气体进行排放;通过设置的搅拌轴与搅拌扇,能够对小苏打溶液进行配置,从而加速小苏打与水的溶解速度;
31.3.本实用新型通过设置的翻转电机,能够使机械手达到翻转效果,从而带动夹持的电池包进行翻转运动;通过设置的滑动丝杆,能够使安装底座在滑动丝杆上进行上下移动,从而完成电池包的移动。
附图说明
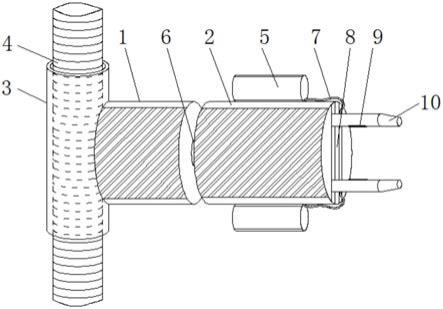
32.图1为本实用新型整体结构示意图;
33.图2为本实用新型整体的内部结构示意图;
34.图3为本实用新型图2中a处放大结构示意图;
35.图4为本实用新型防腐夹持件的结构示意图。
36.图中:1、翻转壳体;2、夹持臂;3、安装底座;4、滑动丝杆;5、清洗罐;6、旋转轴;7、连接管;8、滑槽;9、防腐夹持件;10、夹持头;11、夹持件卡块;12、翻转电机;13、搅拌电机;14、搅拌轴;15、搅拌扇;16、夹持气缸。
具体实施方式
37.请参阅图1-4,本实用新型提供一种技术方案:一种铅酸蓄电池智能全自动铸焊机械手机构,包括:
38.翻转壳体1,翻转壳体1的内部固定安装有翻转电机12;
39.夹持臂2,其转动安装在翻转壳体1的右侧,夹持臂2的两侧对称设有两个清洗罐5,夹持臂2的右侧开设有滑槽8;
40.安装底座3,其固定安装在翻转壳体1的左侧。
41.夹持臂2还设有:
42.夹持气缸16,其固定安装在夹持臂2的内部;
43.夹持头10,其对称设置在夹持气缸16的上下两侧,夹持头10与滑槽8的形状相互吻合,通过夹持气缸16能够带动夹持头10向内进行移动,从而可使夹持头10夹持电池包,对电池包进行移动;
44.夹持头10还设有:
45.防腐夹持件9,其对称活动连接在夹持头10靠近夹持臂2竖直中心线的一侧,防腐夹持件9的两侧对称设有若干个夹持件卡块11,防腐夹持件9设为四氟乙烯材质,通过设置的防腐夹持件9,采用四氟乙烯材质,与电池包接触时,能够避免电池包与机械手表面进行接触,同时电池包如果发生泄漏,硫酸与防腐夹持件9进行接触,能够大大降低硫酸对机械手的腐蚀;
46.清洗罐5还设有:
47.连接管7,其固定连接在清洗罐5的一侧,连接管7从防腐夹持件9的中轴线穿出,通过设置的清洗罐5,能够将清洁液从连接管7处流出,中和防腐夹持件9表面粘附的硫酸溶液,清洁液采用小苏打溶液,与硫酸进行中和,产生无毒的二氧化碳气体进行排放;
48.清洗罐5还设有:
49.搅拌电机13,其固定安装在清洗罐5的内部;
50.搅拌轴14,其键连接在搅拌电机13的右侧;
51.搅拌扇15,其呈螺旋状设置在搅拌轴14的外表面,通过设置的搅拌轴14与搅拌扇15,能够对小苏打溶液进行配置,从而加速小苏打与水的溶解速度;
52.翻转电机12还设有:
53.旋转轴6,其设置在翻转电机12的右侧,翻转壳体1的右端穿出有旋转轴6,通过设置的翻转电机12,能够使机械手达到翻转效果,从而带动夹持的电池包进行翻转运动;
54.安装底座3还设有:
55.滑动丝杆4,其螺纹连接在安装底座3的内部,滑动丝杆4与安装底座3连接处的两端均设有轴承,轴承固定嵌入在安装底座3上,通过设置的滑动丝杆4,能够使安装底座3在滑动丝杆4上进行上下移动,从而完成电池包的移动。
56.工作原理:在使用该铅酸蓄电池智能全自动铸焊机械手机构时,将安装底座3套在
滑动丝杆4的外部,通过驱动装置,驱动滑动丝杆4进行转动,调整安装底座3的位置,启动夹持臂2内部的夹持气缸16,夹持气缸16带动夹持头10进行移动,一侧夹持头10保持固定,另一侧夹持头10在滑槽8内进行滑动,防腐夹持件9与电池包相互接触,从而避免电池包与夹持头10表面发生接触,能够避免硫酸腐蚀夹持头10表面,当少量硫酸粘附在防腐夹持件9的表面时,可启动清洗罐5内的搅拌电机13,搅拌电机13驱动搅拌轴14进行转动,带动搅拌扇15进行转动,从而对内部的小苏打溶液进行搅拌,避免小苏打沉淀,打开连接管7上的阀门,小苏打溶液从连接管7的末端喷出,从而与防腐夹持件9表面粘附的硫酸溶液进行中和,启动翻转壳体1内部的翻转电机12,翻转电机12可驱动旋转轴6进行转动,带动夹持臂2进行翻转,从而带动电池包进行翻转,配合生产线上的其他加工结构,对电池包进行生产加工,这就是该铅酸蓄电池智能全自动铸焊机械手机构的工作原理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1