一种柔性自动打磨机器人系统的制作方法
本发明涉及自动打磨设备,具体涉及一种柔性自动打磨机器人系统。
背景技术:
1、现有的工件因定位或者装配要求需要对表面进行打磨抛光处理,特别是有些工件有多个表面均需处理的情况。如果通过人工使用打磨机进行打磨费时费力,且质量一致性差。也可用机器进行打磨,但现有机器在打磨时通常是仅对一个工件一个表面进行完全部精磨、粗磨、抛光后,依此对所有表面处理完后再对下一个工件进行打磨,这样的打磨效率低下,特别是工件为基础件且体积较小数量较多时。因此,亟需开发一种能满足多工件多表面同时打磨的柔性自动打磨机。
技术实现思路
1、本发明的目的在于提供一种柔性自动打磨机器人系统,解决现有打磨方法费时费力、效率低下的问题。
2、为解决上述的技术问题,本发明采用以下技术方案:一种柔性自动打磨机器人系统,其特征在于:包括机架,机架中部设置有机器人,机器人上设置有工件抓取夹具,机架上设置工作平台,工作平台上一侧设置有零件托盘组件,另一侧设置有工件除尘装置,工作平台位于机器人的正前方设置有柔性打磨机构;所述柔性打磨机构包括工件固定工装台、工件浮动压紧装置、打磨电机组、电机升降装置和水平移动装置,工件固定工装台上设置有多个工件定位装置,工件浮动压紧装置压紧工件顶部,电机升降装置驱动打磨电机组上下移动,打磨电机组包括多组并行设置的不同打磨精度的打磨电机,水平移动装置驱动打磨电机组水平移动。
3、更进一步的技术方案是所述工件固定工装台包括固定基板,固定基板两侧相对设置有支撑板,支撑板顶部通过固定顶板连接,固定顶板上设置有多个工件限位座,固定顶板上设置有多个可供打磨电机伸出的让位孔。
4、更进一步的技术方案是所述水平移动装置包括导杆气缸组和移动座板,导杆气缸组固定端与固定基板连接,导杆气缸组移动端与移动座板连接,移动座板底部的滑块与固定基板顶部的导轨相适配。
5、更进一步的技术方案是所述打磨电机组包括电机固定板,电机固定板上沿水平方向依次设置有粗磨电机组、精磨电机组、抛光电机组,各打磨电机的打磨头穿过电机固定板且位于工件下方,电机升降装置包括升降气缸和导向板,导向板底部固定在移动座板上,导向板侧面的导轨与电机固定板侧面的滑块相适配。
6、更进一步的技术方案是所述工件浮动压紧装置包括摆动气缸,摆动气缸与固定顶板转动连接,摆动气缸端部通过杆端轴承与转动支架一端连接,转动支架底部通过固定轴和轴承与固定顶板转动连接,转动支架另一端设置有压板,压板上设置有多根压杆,摆动气缸带动转动支架转动,使得压杆压紧或松开工件。
7、更进一步的技术方案是所述转动支架靠近压板一侧下表面上设置有喷管固定板,喷管固定板内设置有压缩气管,喷管固定板底部设置有多对喷管组,喷管组为两根相对设置的喷管,喷管端部朝向打磨机的打磨头。
8、更进一步的技术方案是所述工作平台上相对设置有零点定位卡盘,固定基板底部设置有与零点定位卡盘相匹配的定位柱。
9、更进一步的技术方案是所述工件除尘装置包括方形导管,方形导管底部固定在工作平台上,方形导管侧壁顶部开设有让位槽,方形导管外设置有导气管,导气管上设置有出气孔,导气管与压缩气体提供装置连接,出气孔位于让位槽内;方形导管底部通过集尘管与吸尘器连接,集尘管与吸尘器均设置在工作平台下方。
10、更进一步的技术方案是所述零件托盘组件上方设置有高清摄像头,高清摄像头与机器人信号连接。
11、更进一步的技术方案是所述工件抓取夹具包括连接法兰板,连接法兰板下方设置有分气块,分气块侧壁上设置有多个膨胀夹具。
12、工作原理:将需要打磨的工件放置在零件托盘组件内,启动柔性自动打磨机。高清摄像头采集工件位置坐标信息并传送给机器人的控制系统,机器人的工件抓取夹具的膨胀夹具将工件固定并抓起,并放置在工件固定工装台的工件限位座内,放置好后,工件浮动压紧装置的摆动气缸带动转动支架转动,使得压杆压紧工件,工件抓取夹具放开工件。电机升降装置将打磨电机组升起直到其打磨头与工件待打磨面接触,启动打磨电机进行粗磨,粗磨完成后,电机升降装置将打磨电机组降下,水平移动装置推动打磨电机组水平往前移动,使精磨电机组位于工件下方,电机升降装置将打磨电机组升起直到其打磨头与工件待打磨面接触,启动打磨电机进行精磨。依此步骤依次完成粗磨、精磨和抛光后,压杆放开工件,工件抓取夹具将磨好一个面的工件取下,放入另一个工件限位座内,对另一个待磨面进行粗磨、精磨、抛光,直到所有待磨面均处理完成后,将工件取下并放入工件除尘装置内,通过压缩气体吹扫表面,除尘后的工件放置到零件托盘组件内,吹扫过程中的粉尘由吸尘器进行收集。
13、与现有技术相比,本发明的有益效果是:
14、通过工件固定工装台摆放和限位多个工件,工件浮动压紧装置将其压紧,电机升降装置驱动不通过打磨精度的打磨电机依次对工件表面进行粗磨、精磨和抛光,再通过工件抓取夹具调换到另一个打磨面,一次对多个工件进行打磨,提高打磨效率。
15、电机升降装置实现打磨电机的提升和降低,从工件下方对其表面进行打磨,避免打磨过程的粉尘聚积在工件表面上,便于处理;通过多组不同打磨精度的打磨电机结合水平移动装置分别进行粗磨、精磨和抛光,便于对打磨质量的一致性进行控制。
16、通过摆动气动、转动支架和压杆的设置,便于将工件从顶部进一步压紧,方便打磨电机进行打磨。
17、通过从导气管的出气孔中排出压缩空气对工件表面进行吹扫,将其清理干净,被吹起的粉尘通过吸尘器进行收集,便于工件清理也避免粉尘逸出影响环境。
技术特征:
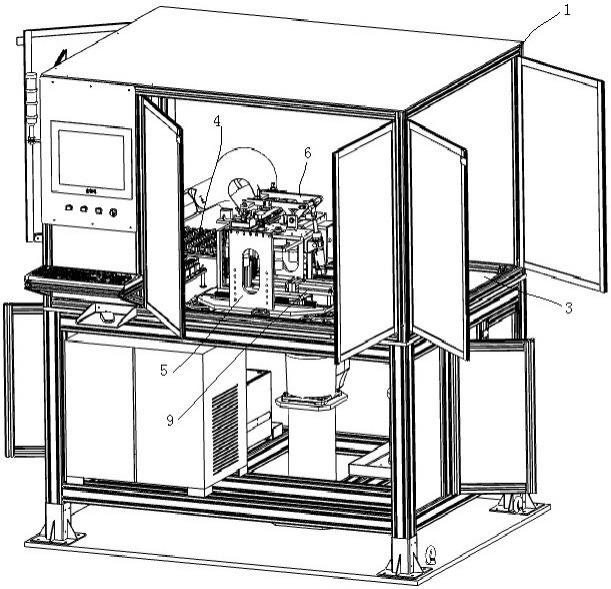
1.一种柔性自动打磨机器人系统,其特征在于:包括机架(1),机架(1)中部设置有机器人,机器人上设置有工件抓取夹具(2),机架(1)上设置工作平台(3),工作平台(3)上一侧设置有零件托盘组件(4),另一侧设置有工件除尘装置(15),工作平台(3)位于机器人的正前方设置有柔性打磨机构;所述柔性打磨机构包括工件固定工装台(5)、工件浮动压紧装置(6)、打磨电机组(7)、电机升降装置(8)和水平移动装置(9),工件固定工装台(5)上设置有多个工件定位装置,工件浮动压紧装置(6)压紧工件(10)顶部,电机升降装置(8)驱动打磨电机组(7)上下移动,打磨电机组(7)包括多组并行设置的不同打磨精度的打磨电机,水平移动装置(9)驱动打磨电机组(7)水平移动。
2.根据权利要求1所述的一种柔性自动打磨机器人系统,其特征在于:所述工件固定工装台(5)包括固定基板(501),固定基板(501)两侧相对设置有支撑板(502),支撑板(502)顶部通过固定顶板(503)连接,固定顶板(503)上设置有多个工件限位座(504),固定顶板(503)上设置有多个可供打磨电机伸出的让位孔。
3.根据权利要求2所述的一种柔性自动打磨机器人系统,其特征在于:所述水平移动装置(9)包括导杆气缸组(11)和移动座板(901),导杆气缸组(11)固定端与固定基板(501)连接,导杆气缸组(11)移动端与移动座板(901)连接,移动座板(901)底部的滑块与固定基板(501)顶部的导轨相适配。
4.根据权利要求3所述的一种柔性自动打磨机器人系统,其特征在于:所述打磨电机组(7)包括电机固定板(701),电机固定板(701)上沿水平方向依次设置有粗磨电机组、精磨电机组、抛光电机组,各打磨电机的打磨头穿过电机固定板(701)且位于工件(10)下方,电机升降装置(8)包括升降气缸(12)和导向板(801),导向板(801)底部固定在移动座板(901)上,导向板(801)侧面的导轨与电机固定板(701)侧面的滑块相适配。
5.根据权利要求2所述的一种柔性自动打磨机器人系统,其特征在于:所述工件浮动压紧装置(6)包括摆动气缸(13),摆动气缸(13)与固定顶板(503)转动连接,摆动气缸(13)端部通过杆端轴承(17)与转动支架(601)一端连接,转动支架(601)底部通过固定轴和轴承与固定顶板(503)转动连接,转动支架(601)另一端设置有压板(602),压板(602)上设置有多根压杆(603),摆动气缸(13)带动转动支架(601)转动,使得压杆(603)压紧或松开工件(10)。
6.根据权利要求5所述的一种柔性自动打磨机器人系统,其特征在于:所述转动支架(601)靠近压板(602)一侧下表面上设置有喷管固定板(14),喷管固定板(14)内设置有压缩气管,喷管固定板(14)底部设置有多对喷管组,喷管组为两根相对设置的喷管,喷管端部朝向打磨机的打磨头。
7.根据权利要求2所述的一种柔性自动打磨机器人系统,其特征在于:所述工作平台(3)上相对设置有零点定位卡盘(16),固定基板(501)底部设置有与零点定位卡盘(16)相匹配的定位柱。
8.根据权利要求1所述的一种柔性自动打磨机器人系统,其特征在于:所述工件除尘装置(15)包括方形导管(151),方形导管(151)底部固定在工作平台(3)上,方形导管(151)侧壁顶部开设有让位槽,方形导管(151)外设置有导气管(152),导气管(152)上设置有出气孔,导气管(152)与压缩气体提供装置连接,出气孔位于让位槽内;方形导管(151)底部通过集尘管(153)与吸尘器(154)连接,集尘管(153)与吸尘器(154)均设置在工作平台(3)下方。
9.根据权利要求1所述的一种柔性自动打磨机器人系统,其特征在于:所述零件托盘组件(4)上方设置有高清摄像头,高清摄像头与机器人信号连接。
10.根据权利要求1所述的一种柔性自动打磨机器人系统,其特征在于:所述工件抓取夹具(2)包括连接法兰板(201),连接法兰板(201)下方设置有分气块(202),分气块(202)侧壁上设置有多个膨胀夹具(203)。
技术总结
本发明公开了一种柔性自动打磨机器人系统,涉及自动打磨设备技术领域。打磨机机架中部设置有机器人,机器人上设置有工件抓取夹具,工作平台上一侧设置有零件托盘组件,另一侧设置有工件除尘装置,工作平台位于机器人的正前方设置有柔性打磨机构;柔性打磨机构的工件固定工装台上设置有多个工件定位装置,工件浮动压紧装置压紧工件顶部,电机升降装置驱动打磨电机组上下移动,打磨电机组包括多组并行设置的不同打磨精度的打磨电机,水平移动装置驱动打磨电机组水平移动。通过工件固定工装台摆放和限位多个工件,工件浮动压紧装置将其压紧,电机升降装置驱动打磨电机依次对工件表面进行粗磨、精磨和抛光,一次对多个工件进行打磨,提高打磨效率。
技术研发人员:杨灏泉,李亚平,杨政荣,李焕,张平
受保护的技术使用者:云南柔控科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!