复杂曲面叶片的机器人磨削设备及其打磨方法与流程
【】本发明涉及智能机器人磨削加工自动化,尤其涉及一种复杂曲面叶片的机器人磨削设备及其打磨方法。
背景技术
0、
背景技术:
1、目前,复杂曲面的加工广泛存在于航空、航天、能源、医疗、五金等行业领域中。单体、连体叶片是其中极具代表性的零件,为保持流体具有均匀的轴向速度、确保流场稳定、减少流体能量损失,叶片从叶根到叶尖,扭角是变化的,从而造成叶片型面是一个不规则的空间复杂曲面。
2、国内外主要在铣削加工成型后,主要采用人工手工磨削,去除叶片表面铣刀纹理或修型处理,人工磨削主要存在以下问题:1)人工磨削加工效率低下,需要反复进行靠形测量与修磨加工;2)熟练人员熟练度不同导致磨削表面质量和几何精度稳定性无法保证;3)叶片磨削过程中会产生大量的粉尘和噪声,对人体有很大伤害。
3、根据以上问题,目前机器人磨削得到一定地应用,但实际加工中存在以下缺陷:1)机器人装夹叶片时由于装夹精度误差,导致实际装夹叶片位置基准与理论装夹位置基准产生偏差,需要进行试加工校准位置基准;2)现有机器人在加工前需要通过人工进行离线仿真生成加工轨迹,操作复杂,极大地降低了加工效率,影响了机器人磨削设备的推广应用。
技术实现思路
0、
技术实现要素:
1、本发明的目的在于提供一种复杂曲面叶片的机器人磨削设备及其打磨方法,该发明实现了对叶片的高精度、高质量和高效率的打磨加工。
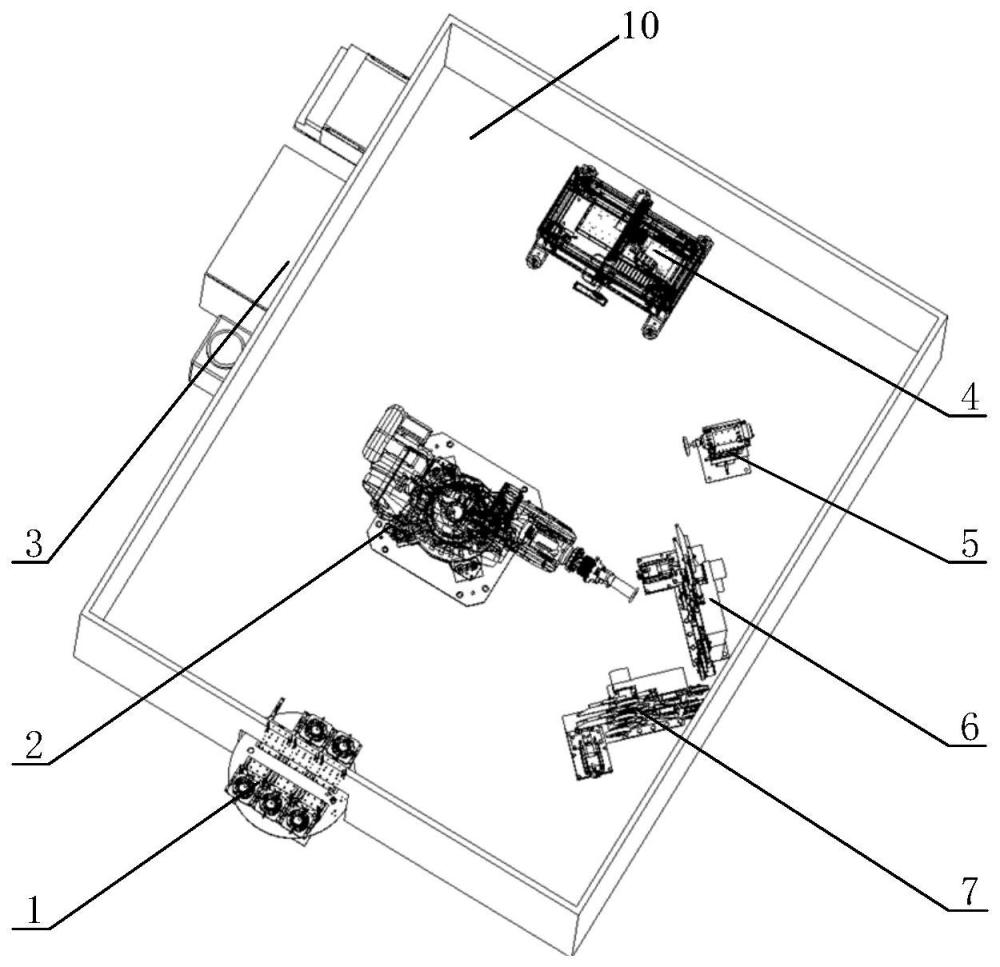
2、为实现上述发明目的之一,本发明提供了一种复杂曲面叶片的机器人磨削设备,其中,所述机器人磨削设备包括均位于打磨房内的上下料转台、工业机器人、自动扫描装置、打磨窄砂带磨削装置、抛光窄砂带磨削装置和去毛刺/倒角装置,所述机器人磨削设备还包括位于打磨房之外的控制系统;
3、所述工业机器人用于将上下料转台上的叶片夹持并运输至各个工位;
4、所述自动扫描装置根据所述控制系统规划路径,并对叶片进行点云数据扫描,以获取叶片基准与叶片外形云数据;
5、所述打磨窄砂带磨削装置根据云数据对叶片进行打磨,所述抛光窄砂带磨削装置根据云数据对叶片进行抛光。
6、作为本发明一实施方式的进一步改进,所述控制系统包括自动扫描子模块、自主轨迹规划子模块、控制打磨子模块和控制抛光子模块,所述自动扫描子模块用于控制自动扫描装置进行叶片的基准与外形扫描,并进行工业机器人的tcp坐标校准与模型匹配,所述自主轨迹规划子模块用于对工业机器人进行打磨轨迹规划和抛光轨迹规划,控制打磨子模块控制所述打磨窄砂带磨削装置对叶片进行打磨,控制抛光子模块控制所述抛光窄砂带磨削装置对叶片进行抛光。
7、作为本发明一实施方式的进一步改进,所述上下料转台一部分位于打磨房外侧为准备工位,所述上下料转台另一部分位于打磨房内侧为待取工位。
8、作为本发明一实施方式的进一步改进,所述自动扫描装置包括控制机柜、四自由度运动平台以及扫描单元;四自由度运动平台设置于所述控制机柜上,所述扫描单元设置于四自由度运动平台的端面上,工业机器人夹持叶片至扫描工位,自动扫描装置与工业机器人配合,且工业机器人夹持工件保持位姿固定,四自由度运动平台的各轴根据控制系统规划路径。
9、作为本发明一实施方式的进一步改进,所述上下料转台包括转台、快换支架及叶片夹持工装。
10、作为本发明一实施方式的进一步改进,所述去毛刺/倒角装置包括机架、设置于所述机架上的力控顺应装置和设置于所述力控顺应装置上的电主轴。
11、作为本发明一实施方式的进一步改进,当所述工业机器人处于初始状态时,所述上下料转台和所述自动扫描装置设置于所述工业机器人相对的两侧。
12、作为本发明一实施方式的进一步改进,所述打磨窄砂带磨削装置和抛光窄砂带磨削装置相垂直布置。
13、为实现上述另一发明目的,本发明还提供了一种复杂曲面叶片的机器人磨削设备的打磨方法,其中,所述打磨方法包括如下步骤:
14、步骤1:在上下料转台准备工位上夹持待加工叶片,且上下料转台转动180°,使上下料转台进入工业机器人待取工位;
15、步骤2:工业机器人从待取工位抓取叶片至扫描工位,自动扫描装置根据控制系统对叶片进行叶片的基准及外形扫描;
16、步骤3:控制系统的自动扫描子模块控制自动扫描装置对叶片进行基准与外形扫描,并进行工业机器人的tcp坐标校准与模型匹配;
17、步骤4:控制系统的自主轨迹规划子模块根据模型匹配结果与模型进行叶片自动轨迹规划,生成工业机器人加工指令;
18、步骤5:工业机器人夹持待磨削叶片进入叶片表面磨削工位,通过打磨窄砂带磨削装置进行叶面打磨加工,在打磨加工完成后通过抛光窄砂带磨削装置进行叶片抛光加工;
19、步骤6:在叶片表面加工完成后,工业机器人夹持叶片进入叶片根部磨削工位,通过去毛刺/倒角装置进行叶片根部的倒圆角与去毛刺加工;
20、步骤7:叶片整体打磨完成后,工业机器人将叶片放入原待取工位,同时工业机器人抓取另一个待加工叶片。
21、作为本发明一实施方式的进一步改进,所述自动扫描装置包括控制机柜、四自由度运动平台以及扫描单元;四自由度运动平台设置于所述控制机柜上,所述扫描单元设置于四自由度运动平台的端面上,工业机器人夹持叶片至扫描工位,自动扫描装置与工业机器人配合,且工业机器人夹持工件保持位姿固定,四自由度运动平台的各轴根据控制系统规划路径。
22、与现有技术相比,本发明具有如下有益效果:本发明替代人工对复杂曲面叶片的磨削加工,实现了对叶片的高精度、高质量和高效率的打磨抛光加工,并可有效应用于其它中小型复杂曲面、磨削精度要求较高的零构件打磨抛光加工。
技术特征:
1.一种复杂曲面叶片的机器人磨削设备,其特征在于,所述机器人磨削设备包括均位于打磨房内的上下料转台、工业机器人、自动扫描装置、打磨窄砂带磨削装置、抛光窄砂带磨削装置和去毛刺/倒角装置,所述机器人磨削设备还包括位于打磨房之外的控制系统;
2.根据权利要求1所述的机器人磨削设备,其特征在于,所述控制系统包括自动扫描子模块、自主轨迹规划子模块、控制打磨子模块和控制抛光子模块,所述自动扫描子模块用于控制自动扫描装置进行叶片的基准与外形扫描,并进行工业机器人的tcp坐标校准与模型匹配,所述自主轨迹规划子模块用于对工业机器人进行打磨轨迹规划和抛光轨迹规划,控制打磨子模块控制所述打磨窄砂带磨削装置对叶片进行打磨,控制抛光子模块控制所述抛光窄砂带磨削装置对叶片进行抛光。
3.根据权利要求1所述的机器人磨削设备,其特征在于,所述上下料转台一部分位于打磨房外侧为准备工位,所述上下料转台另一部分位于打磨房内侧为待取工位。
4.根据权利要求1所述的机器人磨削设备,其特征在于,所述自动扫描装置包括控制机柜、四自由度运动平台以及扫描单元;四自由度运动平台设置于所述控制机柜上,所述扫描单元设置于四自由度运动平台的端面上,工业机器人夹持叶片至扫描工位,自动扫描装置与工业机器人配合,且工业机器人夹持工件保持位姿固定,四自由度运动平台的各轴根据控制系统规划路径。
5.根据权利要求1所述的机器人磨削设备,其特征在于,所述上下料转台包括转台、快换支架及叶片夹持工装。
6.根据权利要求1所述的机器人磨削设备,其特征在于,所述去毛刺/倒角装置包括机架、设置于所述机架上的力控顺应装置和设置于所述力控顺应装置上的电主轴。
7.根据权利要求1所述的机器人磨削设备,其特征在于,当所述工业机器人处于初始状态时,所述上下料转台和所述自动扫描装置设置于所述工业机器人相对的两侧。
8.根据权利要求1所述的机器人磨削设备,其特征在于,所述打磨窄砂带磨削装置和抛光窄砂带磨削装置相垂直布置。
9.一种复杂曲面叶片的机器人磨削设备的打磨方法,其特征在于,所述打磨方法包括如下步骤:
10.根据权利要求9所述的机器人磨削设备的打磨方法,其特征在于,所述自动扫描装置包括控制机柜、四自由度运动平台以及扫描单元;四自由度运动平台设置于所述控制机柜上,所述扫描单元设置于四自由度运动平台的端面上,工业机器人夹持叶片至扫描工位,自动扫描装置与工业机器人配合,且工业机器人夹持工件保持位姿固定,四自由度运动平台的各轴根据控制系统规划路径。
技术总结
本发明提供了一种复杂曲面叶片的机器人磨削设备及其打磨方法,所述机器人磨削设备包括均位于打磨房内的上下料转台、工业机器人、自动扫描装置、打磨窄砂带磨削装置、抛光窄砂带磨削装置和去毛刺/倒角装置,所述机器人磨削设备还包括位于打磨房之外的控制系统;所述工业机器人用于将上下料转台上的叶片夹持并运输至各个工位;所述自动扫描装置根据所述控制系统规划路径,并对叶片进行点云数据扫描,以获取叶片基准与叶片外形云数据;所述打磨窄砂带磨削装置根据云数据对叶片进行打磨,所述抛光窄砂带磨削装置根据云数据对叶片进行抛光。该发明实现了对叶片的高精度、高质量和高效率的打磨加工。
技术研发人员:王力,薛立伟,陈立国
受保护的技术使用者:广因特机器人科技(昆山)有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!