一种基于3D点云数据的打磨轨迹自动规划方法、装置与流程
本发明涉及智能制造领域,尤其涉及一种基于3d点云数据的打磨轨迹自动规划方法、装置。
背景技术:
1、目前,在进行大型面零件表面质量打磨工艺过程中,主要的方法是根据待打磨零件的数模,通过离线编程的方法对打磨轨迹进行规划,生成打磨轨迹程序;然后通过各种定位的方法(3点定位或者视觉定位等),对待打磨零件进行定位,根据定位信息对生成的打磨轨迹程序进行校正,从而实现零件的自动打磨。
2、上述方法中,主要存在以下问题:待打磨零件数模与实际零件的几何偏差,会使得打磨头和待打磨零件的表面不匹配。同时,通过离线编程的方式进行编程后,每次打磨还需要对零件进行定位,导致打磨效率低下。
技术实现思路
1、本发明提供了一种基于3d点云数据的打磨轨迹自动规划方法、装置,解决了大型面零件表面打磨效率低下的问题。
2、一种基于3d点云数据的打磨轨迹自动规划方法,包括:
3、通过3d扫描设备对零件表面的大型面进行数据采集,获得型面表面的点云;
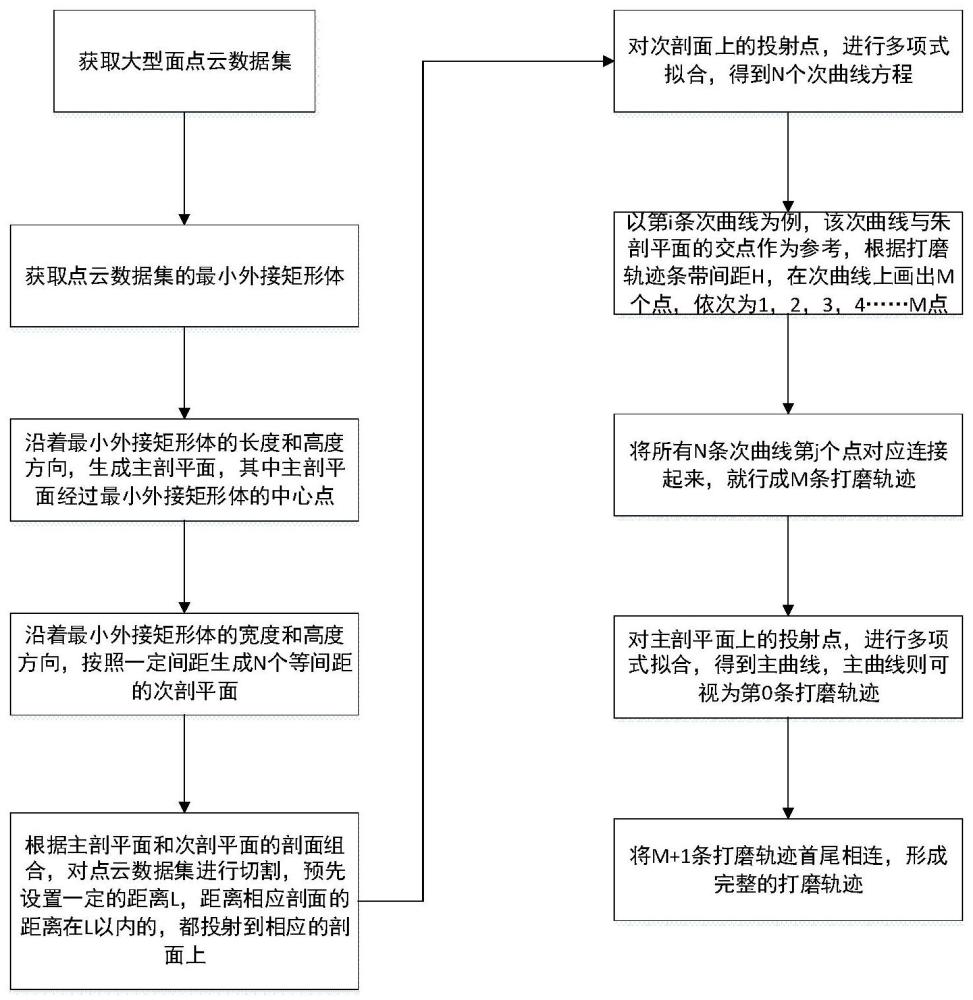
4、获取所述点云的最小外接矩形体,基于所述最小外接矩形体生成剖面;
5、根据预设距离阈值将点云投射到相应的剖面上;
6、对剖面上的投射点集进行多项式拟合,得到路径曲线,根据所述路径曲线确定打磨轨迹;
7、根据所述打磨轨迹生成可执行文件传送到执行机构执行。
8、在本发明的一种实施例中,所述基于所述最小外接矩形体生成剖面,具体包括:基于所述最小外接矩形体生成主剖平面;根据所述主剖平面确定n个次剖平面。
9、在本发明的一种实施例中,所述对剖面上的投射点集进行多项式拟合,得到路径曲线,具体包括:对主剖平面上的投射点集进行多项式拟合,得到主路径曲线;根据主路径曲线的方程,获得主路径曲线与n个次剖平面的交点;对每个次剖平面上的点集进行多项式拟合,得到n个次路径曲线,所述每个次路径曲线经过其所属次剖平面上的交点。
10、在本发明的一种实施例中,所述根据所述路径曲线确定打磨轨迹,具体包括:基于每个次剖平面的交点在对应的次路径曲线上等间距取点,并确定每个点的编号;将不同次剖平面上相同编号的点进行连接,得到等间距路径,将等间距路径首尾连接,得到打磨轨迹。
11、在本发明的一种实施例中,所述主剖平面经过最小外接矩形体的中心点,且主剖平面沿着平行于矩形体长度的方向将最小外接矩形体分割;所述次剖平面沿着平行于矩形体宽度的方向将最小外接矩形体分割。
12、在本发明的一种实施例中,所述次剖平面垂直于所述主剖平面。
13、在本发明的一种实施例中,点云中每个点的信息为(x,y,z)。
14、一种基于3d点云数据的打磨轨迹自动规划装置,包括:
15、数据采集模块,用于通过3d扫描设备对零件表面的大型面进行数据采集,获得型面表面的点云;
16、剖面生成模块,用于获取所述点云的最小外接矩形体,基于所述最小外接矩形体生成剖面;
17、投射模块,用于根据预设距离阈值将点云投射到相应的剖面上;
18、轨迹生成模块,对剖面上的投射点集进行多项式拟合,得到路径曲线,根据所述路径曲线确定打磨轨迹;
19、执行模块,用于根据所述打磨轨迹生成可执行文件传送到执行机构执行。
20、一种基于3d点云数据的打磨轨迹自动规划设备,包括:
21、至少一个处理器;以及,
22、与所述至少一个处理器通过总线通信连接的存储器;其中,
23、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被执行,以实现如上述各实施例任一项所述的方法。
24、一种非易失性存储介质,存储有计算机可执行指令,所述计算机可执行指令由处理器执行,以实现如上述各实施例任一项所述的方法。
25、本发明提供了一种基于3d点云数据的打磨轨迹自动规划方法、装置,至少包括以下有益效果:通过3d扫描设备采集点云数据,根据对点云数据进行打磨轨迹规划,根据规划出的打磨轨迹生成打磨轨迹执行程序,能够直接引导执行机构实现全自动运行打磨,而不需要进行人工校准和标定,解放了人力,降低了时间和人力成本,显著提高了打磨效率。
技术特征:
1.一种基于3d点云数据的打磨轨迹自动规划方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述最小外接矩形体生成剖面,具体包括:
3.根据权利要求2所述的方法,其特征在于,所述对剖面上的投射点集进行多项式拟合,得到路径曲线,具体包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述路径曲线确定打磨轨迹,具体包括:
5.根据权利要求2所述的方法,其特征在于,所述主剖平面经过最小外接矩形体的中心点,且主剖平面沿着平行于矩形体长度的方向将最小外接矩形体分割;
6.根据权利要求5所述的方法,其特征在于,所述次剖平面垂直于所述主剖平面。
7.根据权利要求1所述的方法,其特征在于,点云中每个点的信息为(x,y,z)。
8.一种基于3d点云数据的打磨轨迹自动规划装置,其特征在于,包括:
9.一种基于3d点云数据的打磨轨迹自动规划设备,其特征在于,包括:
10.一种非易失性存储介质,存储有计算机可执行指令,其特征在于,所述计算机可执行指令由处理器执行,以实现如权利要求1-7任一项所述的方法。
技术总结
本发明公开了一种基于3D点云数据的打磨轨迹自动规划方法、装置,该方法包括:通过3D扫描设备对零件表面的大型面进行数据采集,获得型面表面的点云;获取所述点云的最小外接矩形体,基于所述最小外接矩形体生成剖面;根据预设距离阈值将点云投射到相应的剖面上;对剖面上的投射点集进行多项式拟合,得到路径曲线,根据所述路径曲线确定打磨轨迹;根据所述打磨轨迹生成可执行文件传送到执行机构执行。本发明解决了大型面零件表面打磨效率低下的问题。
技术研发人员:陈智超,徐旺,汪顺利,邓景煜,张宪法,蔡帅鹏,葛威
受保护的技术使用者:商飞智能技术有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!