一种用于抛丸机器人驱动装置磁吸单元组件的制作方法
本技术涉及抛丸机器人驱动装置,具体地说是一种用于抛丸机器人驱动装置磁吸单元组件。
背景技术:
1、在钢结构或船舶建造过程中,通常需要对大面积对接焊缝区域进行喷丸除锈处理作业,传统通过人力除锈的方式,效率低下,且对人体的伤害较大,逐步被抛丸机器人取代,而抛丸机器人的驱动装置则是机器人的行走功能核心。
2、抛丸机器人的驱动装置功能是利用左右两组驱动单元,每组驱动单元利用同步带配对同步带轮及其驱动电机完成其行走功能。而整个机器人能够在钢板表面行走,则是利用左右两组磁吸组件吸附,而每组磁吸组则由若干高强稀土钕铁硼永磁铁铰链而成,当磁吸组件在遇到不平作业面或焊缝时,能自我调节越过。
3、现有技术中的磁吸组件的结构采用等腰梯形铰接臂形式,在结构上复杂、零件多、组装繁琐,牵连零件多,自由度小,导致适应作业面时响应迟缓。
4、基于以上原因,本实用新型设计了一种用于抛丸机器人驱动装置磁吸单元组件,重新将磁吸组件结构进行改进设计,在满足磁吸组件的同等功能下,使其结构上更为简单,减少零件,组装方便,具备更大自由度,更容易响应实际作业工况。
技术实现思路
1、本实用新型的目的是克服现有技术的不足,提供一种用于抛丸机器人驱动装置磁吸单元组件,重新将磁吸组件结构进行改进设计,在满足磁吸组件的同等功能下,使其结构上更为简单,减少零件,组装方便,具备更大自由度,更容易响应实际作业工况。
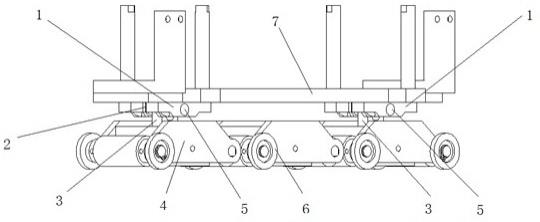
2、为了达到上述目的,本实用新型提供一种用于抛丸机器人驱动装置磁吸单元组件,包括连接板石墨铜片,孔结构,铰链壳,销轴,轮毂和浮动安装件,浮动安装件的下端两侧分别设置有一对连接板,连接板通过销轴与孔结构配合连接,孔结构设置在磁吸单元顶部,磁吸单元的外侧设置有铰链壳,铰链壳的一侧通过连接轴设置有轮毂。
3、连接板与孔结构之间设置有石墨铜片。
4、孔结构上设置有开孔。
5、连接板与孔结构之间留有使浮动安装件左右摆动的间隙。
6、石墨铜片上设置有石墨柱用以润滑与孔结构之间的摩擦。
7、同现有技术相比,本实用新型提供结构更为简单的磁吸组件,零件少,组装方便,并且具备更大自由度,更容易响应实际作业工况。
8、这种改进设计的磁吸组件结构,能在原有结构基础上,减少零件数量,对相关配套零件无需额外机加工,减少繁琐安装、提高效率,使设备使用更为便捷、友好。
技术特征:
1.一种用于抛丸机器人驱动装置磁吸单元组件,其特征在于,包括连接板(1),石墨铜片(2),孔结构(3),铰链壳(4),销轴(5),轮毂(6)和浮动安装件(7),所述浮动安装件(7)的下端两侧分别设置有一对所述连接板(1),所述连接板(1)通过所述销轴(5)与所述孔结构(3)配合连接,所述孔结构(3)设置在磁吸单元顶部,所述磁吸单元的外侧设置有所述铰链壳(4),所述铰链壳(4)的一侧通过连接轴设置有所述轮毂(6)。
2.根据权利要求1所述的用于抛丸机器人驱动装置磁吸单元组件,其特征在于,所述连接板(1)与所述孔结构(3)之间设置有所述石墨铜片(2)。
3.根据权利要求1所述的用于抛丸机器人驱动装置磁吸单元组件,其特征在于,所述孔结构(3)上设置有开孔。
4.根据权利要求1所述的用于抛丸机器人驱动装置磁吸单元组件,其特征在于,所述连接板(1)与所述孔结构(3)之间留有使浮动安装件(7)左右摆动的间隙。
5.根据权利要求1所述的用于抛丸机器人驱动装置磁吸单元组件,其特征在于,所述石墨铜片(2)上设置有石墨柱用以润滑与所述孔结构(3)之间的摩擦。
技术总结
本技术涉及抛丸机器人驱动装置技术领域,具体地说是一种用于抛丸机器人驱动装置磁吸单元组件,浮动安装件的下端两侧分别设置有一对连接板,连接板通过销轴与孔结构配合连接,孔结构设置在磁吸单元顶部,磁吸单元的外侧设置有铰链壳,铰链壳的一侧通过连接轴设置有轮毂,同现有技术相比,本技术提供结构更为简单的磁吸组件,零件少,组装方便,并且具备更大自由度,更容易响应实际作业工况。
技术研发人员:谭垚,王义香,马欣宇
受保护的技术使用者:上海锐斯船舶科技有限公司
技术研发日:20230523
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!