可快速拆卸更换抛光盘的打磨机械臂的制作方法
本技术涉及机器人手臂,尤其是可快速拆卸更换抛光盘的打磨机械臂。
背景技术:
1、机器人手臂又称机械臂,通常指一种可编程的,具有与人类手臂相似功能的机械臂;该臂可以是一个完整的机械装置,也可以是更复杂的机器人的一部分,这种机械手通过关节连接使其可以完成旋转运动例如在关节机器人中或平移线性运动,机械手通过各个关节的连接最终形成了一个运动链,机械手运动链的末端被称为末端执行器,它类似于人的手。
2、但现有技术中的机械臂在使用时还存一些弊端,不便于对机械臂进行使用,从而降低了机械臂的使用效果,为此,我们提出可快速拆卸更换抛光盘的打磨机械臂解决上述问题。
技术实现思路
1、本实用新型的目的在于提供可快速拆卸更换抛光盘的打磨机械臂,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
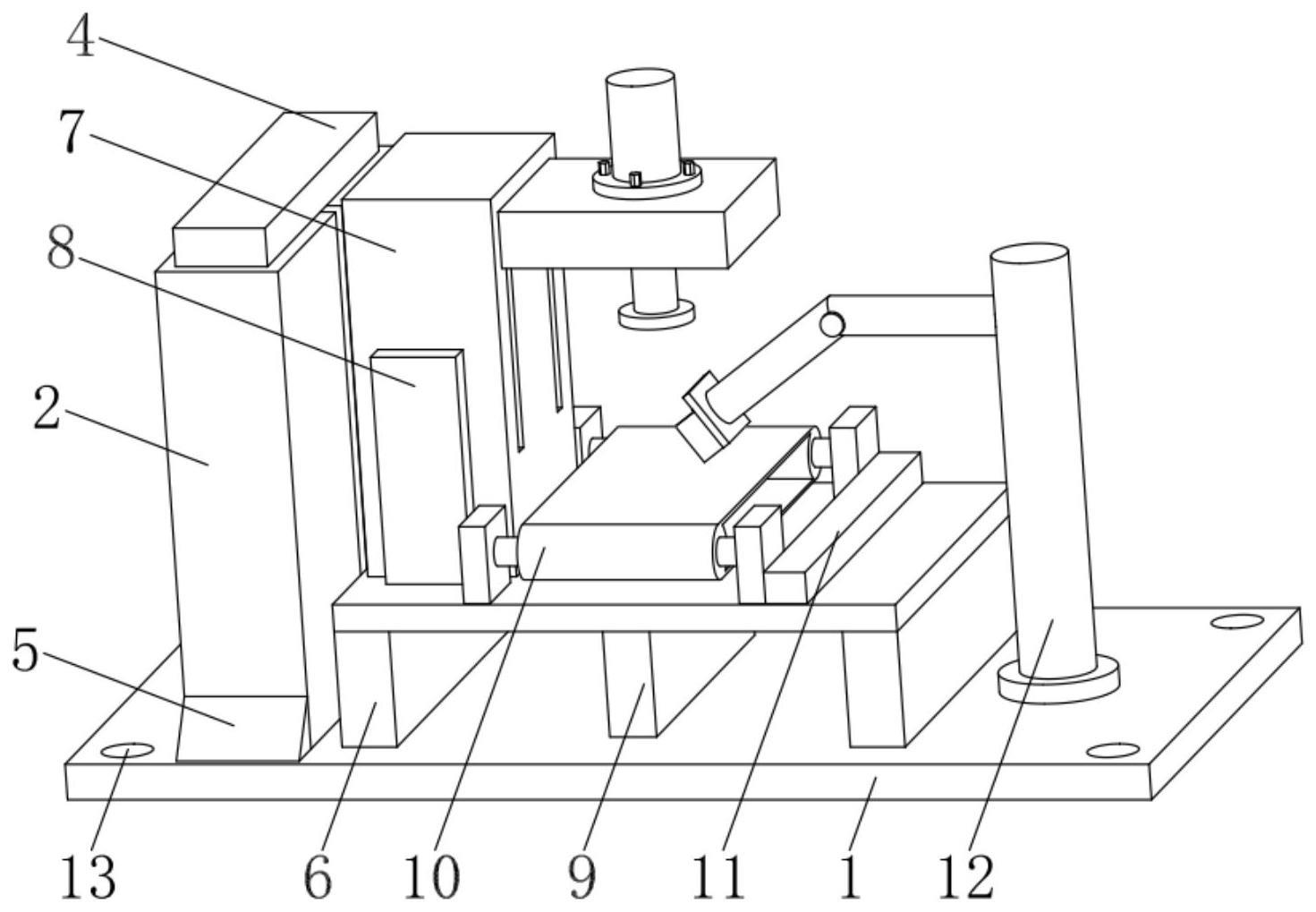
3、可快速拆卸更换抛光盘的打磨机械臂,包括固定板,所述固定板的上表面分别固定连接有空气压缩机和机器人控制柜,所述固定板的上表面固定连接有固定架,所述固定架的上表面固定连接有打磨机,所述固定架的上表面固定连接有传送机组,所述固定板的上表面固定连接有机械臂。
4、在进一步的实施例中,所述空气压缩机的上表面和机器人控制柜的上表面共同固定连接有加固板,所述固定板的上表面均固定连接有两个限位板,两个所述限位板相互靠近的一侧面分别与空气压缩机的正面和机器人控制柜的背面固定连接。
5、在进一步的实施例中,所述固定架的上表面固定连接有两个定位板,两个所述定位板相互靠近的一侧面分别与打磨机的正面和打磨机的背面固定连接。
6、在进一步的实施例中,所述固定板的上表面固定连接有支撑板,所述支撑板的顶端与固定架的底面固定连接。
7、在进一步的实施例中,所述固定架的上表面固定连接有加固块,所述加固块的左侧面与传送机组的右侧面固定连接。
8、在进一步的实施例中,所述固定板的上表面开设有两组安装孔,每个所述安装孔的内圈均开设有螺纹。
9、与现有技术相比,本实用新型的有益效果是:
10、本装置通过空气压缩机和传送机组的配合,起到使空气压缩机推动气割将物料推送至传送机组处的作用,并利用传送机组处第一个光电传感器和第二光电传感器的组合使用,起到对物料到达进行检测的作用,达到使传送机组进行停止运输的目的,防止物料出现超程的问题,通过机械臂和打磨机的配合,起到对物料进行夹取并保持打磨姿态固定的作用,达到对物料进行打磨的目的。
技术特征:
1.可快速拆卸更换抛光盘的打磨机械臂,其特征在于:包括固定板(1),所述固定板(1)的上表面分别固定连接有空气压缩机(2)和机器人控制柜(3),所述固定板(1)的上表面固定连接有固定架(6),所述固定架(6)的上表面固定连接有打磨机(7),所述固定架(6)的上表面固定连接有传送机组(10),所述固定板(1)的上表面固定连接有机械臂(12)。
2.根据权利要求1所述的可快速拆卸更换抛光盘的打磨机械臂,其特征在于:所述空气压缩机(2)的上表面和机器人控制柜(3)的上表面共同固定连接有加固板(4),所述固定板(1)的上表面均固定连接有两个限位板(5),两个所述限位板(5)相互靠近的一侧面分别与空气压缩机(2)的正面和机器人控制柜(3)的背面固定连接。
3.根据权利要求1所述的可快速拆卸更换抛光盘的打磨机械臂,其特征在于:所述固定架(6)的上表面固定连接有两个定位板(8),两个所述定位板(8)相互靠近的一侧面分别与打磨机(7)的正面和打磨机(7)的背面固定连接。
4.根据权利要求1所述的可快速拆卸更换抛光盘的打磨机械臂,其特征在于:所述固定板(1)的上表面固定连接有支撑板(9),所述支撑板(9)的顶端与固定架(6)的底面固定连接。
5.根据权利要求1所述的可快速拆卸更换抛光盘的打磨机械臂,其特征在于:所述固定架(6)的上表面固定连接有加固块(11),所述加固块(11)的左侧面与传送机组(10)的右侧面固定连接。
6.根据权利要求1所述的可快速拆卸更换抛光盘的打磨机械臂,其特征在于:所述固定板(1)的上表面开设有两组安装孔(13),每个所述安装孔(13)的内圈均开设有螺纹。
技术总结
本技术公开了可快速拆卸更换抛光盘的打磨机械臂,包括固定板,所述固定板的上表面分别固定连接有空气压缩机和机器人控制柜,所述固定板的上表面固定连接有固定架,所述固定架的上表面固定连接有打磨机,所述固定架的上表面固定连接有传送机组,所述固定板的上表面固定连接有机械臂。本装置通过空气压缩机和传送机组的配合,起到使空气压缩机推动气割将物料推送至传送机组处的作用,并利用传送机组处第一个光电传感器和第二光电传感器,起到对物料到达进行检测的作用,达到使传送机组进行停止运输的目的,防止物料出现超程的问题,通过机械臂和打磨机的配合,起到对物料进行夹取并保持打磨固定的作用,达到对物料进行打磨的目的。
技术研发人员:杨宽,喻林松,胡萍
受保护的技术使用者:云南蓝脉科技有限责任公司
技术研发日:20230724
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!