一种高精度打磨机器人的制作方法
本技术涉及打磨机器人废料收集,尤其涉及一种高精度打磨机器人。
背景技术:
1、打磨机器人又称自动打磨设备,通过外接plc控制,从而实现自动打磨的效果,可大幅降低人工打磨所需的效率以及人工成本,一般打磨机器人为高精度的打磨设备,在对物料进行打磨时会根据设定的程序自动精密打磨。
2、公告号为cn215469977u的专利说明书公开了一种高精度打磨机器人,包括收集箱、活动板和钢管,所述收集箱顶部的后端固定连接有固定板,所述活动板的底部固定连接有电机,所述电机的输出轴固定连接有打磨石,所述收集箱顶部的两侧均固定连接有固定块,所述固定块的一侧固定连接有套筒,套筒的内腔滑动连接有套杆,套杆的另一端固定连接有夹座,套筒和套杆的表面均套设有复位弹簧。该实用新型通过拉动拉杆,拉杆带动夹座向一侧运动,夹座带动套杆和复位弹簧向一侧运动,使复位弹簧压缩产生形变,之后通过将钢管放置在夹座的内腔,松开拉杆,通过复位弹簧的复位弹力带动夹座和套杆复位向一侧运动,最后通过夹座对钢管进行夹紧,从而完成对钢管定位。
3、然而在实施相关技术中发现上述一种高精度打磨机器人存在以下问题:上述打磨机器人在对木料进行打磨时,无需边打磨边喷水,干燥的木屑可直接落入抽屉内,而一旦打磨石料时,需要一边喷水一边打磨,水和石料碎屑会一同进入抽屉内,而抽屉内并未设置过滤结构,在操作人员拉开抽屉清理废料时,会连带着水一同倒出,水资源很难进行二次利用,大幅增加了水资源的浪费,鉴于此,提供一种高精度打磨机器人以克服上述缺陷。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种高精度打磨机器人。
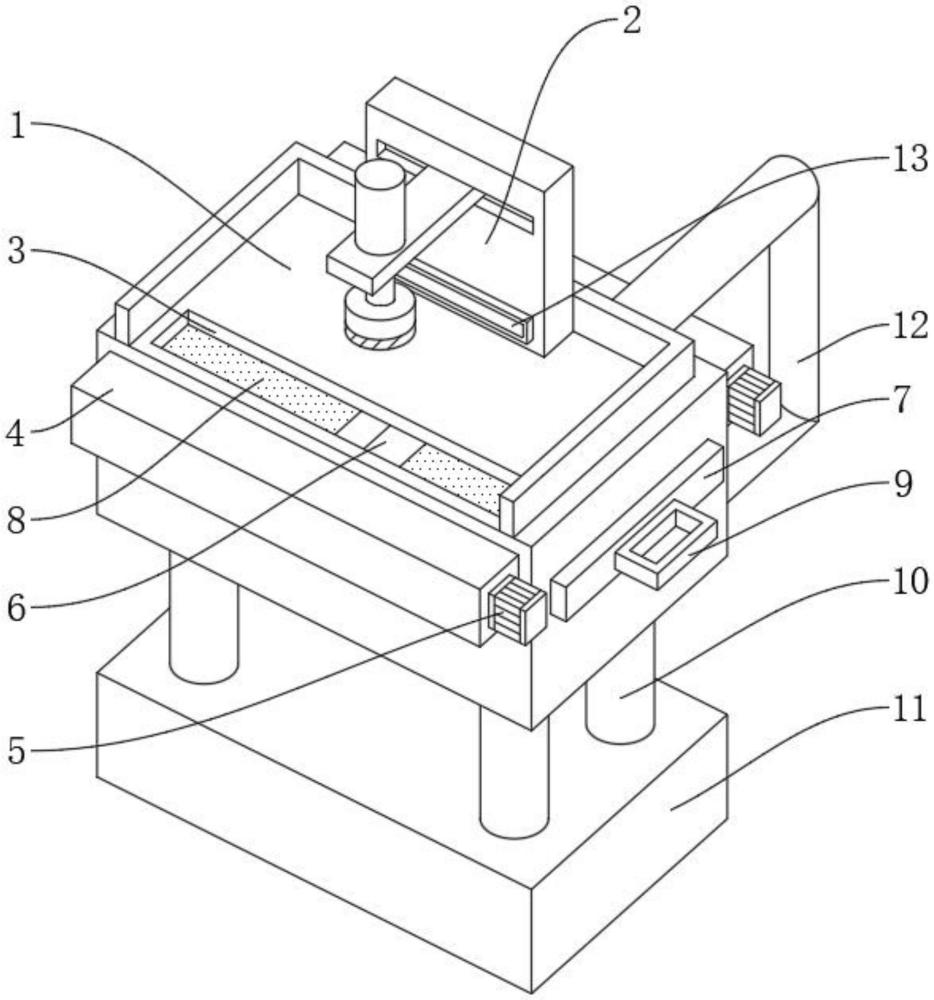
2、为了实现上述目的,本实用新型采用了如下技术方案:一种高精度打磨机器人,包括操作台,所述操作台上端面后方中间设置有打磨组,所述操作台上端面前侧开设有废料口,所述操作台前后两端面上方固定连接有中空壳,所述中空壳右端面固定连接有电机,所述电机左侧输出端固定连接有螺纹杆,所述螺纹杆外侧螺旋连接有移动块,所述移动块内端面固定连接有连接杆,所述连接杆另一端固定连接有刮板,所述操作台内部右侧上方滑动连接有框架,所述框架内侧固定连接有过滤网,所述框架右端面中间固定连接有握把,所述操作台内部下方固定连接有斜板,所述斜板内部固定连接有中空管,所述中空管另一端固定连接有底壳,所述底壳内部左右两侧设置有蓄水仓,所述底壳内部中间固定连接有水泵,所述水泵左右两侧输入端固定连接有抽水管,所述水泵后方输出端固定连接输水管,所述输水管另一端固定连接有喷水板。
3、作为上述技术方案的进一步描述:所述螺纹杆左侧顶端与中空壳内部左侧顶端转动连接,所述移动块外侧与中空壳内部滑动连接,所述连接杆外侧与中空壳内部内侧和操作台内部外侧上方均滑动连接,所述刮板下端面与过滤网上方接触,所述操作台内部下方与中空管上方外侧固定连接,所述底壳内部后方中间与输水管外侧固定连接,所述打磨组内部下方中间与喷水板固定连接。
4、作为上述技术方案的进一步描述:所述操作台上端面前侧的废料口长度是操作台左右两侧长度的三分之二,且操作台上端面前侧的废料口正下方是过滤网前侧上方位置处。
5、作为上述技术方案的进一步描述:所述框架的长度和宽度均与操作台内部长度和宽度相同,且框架的边缘厚度为三厘米,所述过滤网的横切面形状与框架的横切面形状相同,所述操作台内部前后两侧上方开设有滑槽,且操作台内部前后两侧上方的滑槽宽度和长度均与框架的厚度和左右两侧长度相同。
6、作为上述技术方案的进一步描述:所述操作台左侧顶端上方开设有排料槽,且操作台左侧顶端上方的排料槽设置在过滤网左侧顶端的上方两厘米位置处,所述刮板与过滤网呈垂直状态。
7、作为上述技术方案的进一步描述:所述斜板设有自中间向左右两侧下方倾斜三十度的斜坡,所述中空管的数量为四个,且中空管分布在斜板内部、操作台内部下方以及底壳上端面的左前侧、左后侧、右前侧、右后侧四个位置。
8、作为上述技术方案的进一步描述:所述抽水管的数量与中空管的数量相同,且抽水管的外侧顶端与中空管底端呈垂直状态,所述输水管的整体形状为凹型。
9、本实用新型具有如下有益效果:
10、本实用新型设计的高精度打磨机器人,通过设计配合,使得装置可以在打磨组对石料进行打磨时,可快速对减小摩擦的水和石料碎屑进行分离,分离后的石料碎屑被电机和刮板带动向操作台左侧移动,从排料槽处或者过滤网上向外排出,而过滤后的水则通过水泵重新注入输水管中,提高水资源的循环利用效率,减少水资源的浪费。
技术特征:
1.一种高精度打磨机器人,包括操作台(1),其特征在于:所述操作台(1)上端面后方中间设置有打磨组(2),所述操作台(1)上端面前侧开设有废料口(3),所述操作台(1)前后两端面上方固定连接有中空壳(4),所述中空壳(4)右端面固定连接有电机(5),所述电机(5)左侧输出端固定连接有螺纹杆(14),所述螺纹杆(14)外侧螺旋连接有移动块(15),所述移动块(15)内端面固定连接有连接杆(16),所述连接杆(16)另一端固定连接有刮板(6),所述操作台(1)内部右侧上方滑动连接有框架(7),所述框架(7)内侧固定连接有过滤网(8),所述框架(7)右端面中间固定连接有握把(9),所述操作台(1)内部下方固定连接有斜板(17),所述斜板(17)内部固定连接有中空管(10),所述中空管(10)另一端固定连接有底壳(11),所述底壳(11)内部左右两侧设置有蓄水仓(18),所述底壳(11)内部中间固定连接有水泵(19),所述水泵(19)左右两侧输入端固定连接有抽水管(20),所述水泵(19)后方输出端固定连接输水管(12),所述输水管(12)另一端固定连接有喷水板(13)。
2.根据权利要求1所述的一种高精度打磨机器人,其特征在于:所述螺纹杆(14)左侧顶端与中空壳(4)内部左侧顶端转动连接,所述移动块(15)外侧与中空壳(4)内部滑动连接,所述连接杆(16)外侧与中空壳(4)内部内侧和操作台(1)内部外侧上方均滑动连接,所述刮板(6)下端面与过滤网(8)上方接触,所述操作台(1)内部下方与中空管(10)上方外侧固定连接,所述底壳(11)内部后方中间与输水管(12)外侧固定连接,所述打磨组(2)内部下方中间与喷水板(13)固定连接。
3.根据权利要求1所述的一种高精度打磨机器人,其特征在于:所述操作台(1)上端面前侧的废料口(3)长度是操作台(1)左右两侧长度的三分之二,且操作台(1)上端面前侧的废料口(3)正下方是过滤网(8)前侧上方位置处。
4.根据权利要求1所述的一种高精度打磨机器人,其特征在于:所述框架(7)的长度和宽度均与操作台(1)内部长度和宽度相同,且框架(7)的边缘厚度为三厘米,所述过滤网(8)的横切面形状与框架(7)的横切面形状相同,所述操作台(1)内部前后两侧上方开设有滑槽,且操作台(1)内部前后两侧上方的滑槽宽度和长度均与框架(7)的厚度和左右两侧长度相同。
5.根据权利要求1所述的一种高精度打磨机器人,其特征在于:所述操作台(1)左侧顶端上方开设有排料槽,且操作台(1)左侧顶端上方的排料槽设置在过滤网(8)左侧顶端的上方两厘米位置处,所述刮板(6)与过滤网(8)呈垂直状态。
6.根据权利要求1所述的一种高精度打磨机器人,其特征在于:所述斜板(17)设有自中间向左右两侧下方倾斜三十度的斜坡,所述中空管(10)的数量为四个,且中空管(10)分布在斜板(17)内部、操作台(1)内部下方以及底壳(11)上端面的左前侧、左后侧、右前侧、右后侧四个位置。
7.根据权利要求1所述的一种高精度打磨机器人,其特征在于:所述抽水管(20)的数量与中空管(10)的数量相同,且抽水管(20)的外侧顶端与中空管(10)底端呈垂直状态,所述输水管(12)的整体形状为凹型。
技术总结
本技术涉及打磨机器人废料收集技术领域,尤其是指一种高精度打磨机器人,包括操作台,操作台上端面后方中间设置有打磨组,操作台上端面前侧开设有废料口,操作台前后两端面上方固定连接有中空壳,中空壳右端面固定连接有电机,电机左侧输出端固定连接有螺纹杆,螺纹杆外侧螺旋连接有移动块,移动块内端面固定连接有刮板,操作台内部右侧上方滑动连接有框架,通过设计配合,使得装置可以在打磨组对石料进行打磨时,可快速对减小摩擦的水和石料碎屑进行分离,分离后的石料碎屑被电机和刮板带动向操作台左侧移动,而过滤后的水则通过水泵重新注入输水管中,提高水资源的循环利用效率,减少水资源的浪费。
技术研发人员:林浩祥,林炜凯,林友旺
受保护的技术使用者:瑞安市中凯自动化科技有限公司
技术研发日:20230817
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!