一种用于机器人打磨行业的重型车桥夹具装置的制作方法
本技术涉及机器人集成行业领域,具体是一种用于机器人打磨行业的重型车桥夹具装置。
背景技术:
1、在车桥生产过程种,对于铸造成型的车桥,需要对车桥进行打磨去毛刺。在传统的车桥生产流程中,由人工进行铸造车桥打磨和去毛刺,效率低且一致性差,通过增加机器人进行打磨可以避免这些问题,但需要车桥在打磨位置上固定且位置一致,这对车桥的夹具设计有较高要求。
2、对于重型车轿的工装夹具,绝大多数是适用于加工机床,设计较为复杂,且不适用于机器人多个角度进行打磨作业,导致可被打磨位置减少,虽然定位精确,但对于机器人打磨,定位精度要求不高。并且人工上件复杂,没有很好的拓展性。
3、因此,现需提供一种适用广泛,结构简单,操作方便的重型车桥夹具装置。可以高效的、稳定的提高机器人车桥打磨作业的效率和质量。
技术实现思路
1、为了解决上述问题,本实用新型提出一种用于机器人打磨行业的重型车桥夹具装置。
2、一种用于机器人打磨行业的重型车桥夹具装置,包括沿重型车桥对称分布的以下组件:
3、轴向定位组件,对重型车桥进行对中和轴向定位;
4、径向定位组件,对重型车桥进行径向定位;
5、夹紧组件,与轴向定位组件和径向定位组件配合对定位后的重型车桥进行夹紧。
6、作为本实用新型的进一步改进,所述的轴向定位组件包括v型支撑座、设置在v型支撑座上的挡板,所述的挡板与重型车桥的轮廓贴合。
7、作为本实用新型的进一步改进,所述的径向定位组件包括设置在v型支撑座上且相互配合的碟形弹簧、浮动支柱,还包括与重型车桥配合的压紧调节螺栓。
8、作为本实用新型的进一步改进,所述的碟形弹簧套在浮动支柱上。
9、作为本实用新型的进一步改进,所述的夹紧组件包括压紧底座、与压紧底座配合的压紧臂、与压紧底座、压紧臂配合的快速卡钳。
10、作为本实用新型的进一步改进,所述的压紧调节螺栓设置在压紧臂上。
11、本实用新型的有益效果是:
12、本实用新型通过快速卡钳解决了铸件一致性差、夹具机构遮盖了大量打磨位置的问题,从而提升了产品的质量,减少了后续人工补磨工作;相较于其他车桥夹具装置,本实用新型通过设计碟形弹簧、浮动支柱,结构简单合理,具备一定浮动特性,避免机器人打磨头损伤,从而更适用于机器人打磨领域。
技术特征:
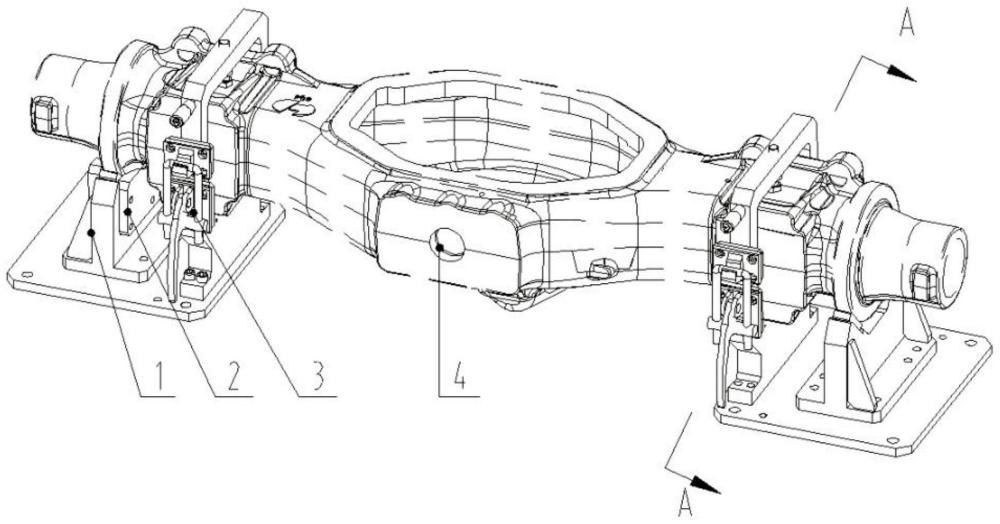
1.一种用于机器人打磨行业的重型车桥夹具装置,其特征在于:包括沿重型车桥(4)对称分布的以下组件:
2.根据权利要求1所述的一种用于机器人打磨行业的重型车桥夹具装置,其特征在于:所述的轴向定位组件包括v型支撑座(1)、设置在v型支撑座(1)上的挡板(2),所述的挡板(2)与重型车桥(4)的轮廓贴合。
3.根据权利要求1所述的一种用于机器人打磨行业的重型车桥夹具装置,其特征在于:所述的径向定位组件包括设置在v型支撑座(1)上且相互配合的碟形弹簧(7)、浮动支柱(8),还包括与重型车桥(4)配合的压紧调节螺栓(9)。
4.根据权利要求3所述的一种用于机器人打磨行业的重型车桥夹具装置,其特征在于:所述的碟形弹簧(7)套在浮动支柱(8)上。
5.根据权利要求1所述的一种用于机器人打磨行业的重型车桥夹具装置,其特征在于:所述的夹紧组件包括压紧底座(5)、与压紧底座(5)配合的压紧臂(6)、与压紧底座(5)、压紧臂(6)配合的快速卡钳(3)。
6.根据权利要求3所述的一种用于机器人打磨行业的重型车桥夹具装置,其特征在于:所述的压紧调节螺栓(9)设置在压紧臂(6)上。
技术总结
本技术涉及机器人集成行业领域,具体是一种用于机器人打磨行业的重型车桥夹具装置,包括沿重型车桥对称分布的以下组件:轴向定位组件,对重型车桥进行对中和轴向定位;径向定位组件,对重型车桥进行径向定位;夹紧组件,与轴向定位组件和径向定位组件配合对定位后的重型车桥进行夹紧。本技术通过快速卡钳解决了铸件一致性差、夹具机构遮盖了大量打磨位置的问题,从而提升了产品的质量,减少了后续人工补磨工作;相较于其他车桥夹具装置,本技术通过设计碟形弹簧、浮动支柱,结构简单合理,具备一定浮动特性,避免机器人打磨头损伤,从而更适用于机器人打磨领域。
技术研发人员:詹鑫国,张龙,朱伦,孙莉
受保护的技术使用者:埃华路(芜湖)机器人工程有限公司
技术研发日:20230828
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!