用于车辆的后向感知系统的制作方法
用于车辆的后向感知系统
1.相关申请的交叉引用
2.本专利文档要求2018年9月7日提交的名称为“用于车辆的后向感知系统(rear
‑
facing perception system for vehicles)”的美国专利申请第16/125,531号的优先权和权益。前述专利申请的全部内容作为本专利文档的公开内容的一部分来以引用的方式并入本文中。
技术领域
3.本文涉及车辆监测和控制。
背景技术:
4.自主车辆导航是用于感测车辆的位置和移动并且基于该感测来自主地控制车辆导航至目的地的技术。自主车辆导航在人员、货物或服务的运输中可以具有重要应用。确保车辆及其乘客以及车辆附近的人员和财产的安全的自主驾驶组件中的一个自主驾驶成分是对车辆的后方周围的区域的精确感知。
技术实现要素:
5.公开了用于车辆的后向感知系统的设备、系统和方法。在一些实施例中,包括中央单元和两个拐角单元的自供电且自动同步的后向感知系统安装在车辆的后方处或半拖卡车上(通常被称为牵引式拖车或“半”),并且在车辆的后方周围提供无障碍的区域。拐角单元和中央单元与邻近于车辆的驾驶员定位的控制单元进行无线通信。
6.在一个方面中,所公开的技术可以用于提供一种用于运行车辆中的后向感知单元的方法。一种示例性后向感知系统包含两个拐角单元和中央单元,其中两个拐角单元和中央单元中的每一个包括相机模块和双波段收发器。该方法包括:通过使用双波段收发器经由至少第一频率波段进行通信来与控制单元配对;在成功配对时向两个拐角单元传输第一触发信号,其中第一触发信号经由与第一频率波段不重叠的第二频率波段而被传输;以及在传输第一触发信号之后切换至主动模式,其中第一触发信号使两个拐角单元切换至主动模式,其中功率模块包括电池,并且其中主动模式包括:将中央单元和两个拐角单元上的相机模块定向成提供车辆的后方周围的区域的无障碍视图。
7.在另一方面中,上述方法以处理器可执行代码的形式实施并且存储在计算机可读程序介质中。
8.在再一方面中,公开了一种被配置为或可操作以执行上述方法的设备。该设备可以包括被编程为实施该方法的处理器。
9.在附图、说明书和权利要求书中更详细地描述了所公开的技术的以上和其他方面以及特征。
附图说明
10.图1示出了安装在半拖卡车(通常被称为牵引式拖车)上的后向感知系统的示例。
11.图2示出了示例后向感知系统的框图。
12.图3示出了后向感知系统的示例中央集成单元(ciu)的框图。
13.图4示出了后向感知系统的示例拐角集成单元的框图。
14.图5示出了用于手动地同步后向感知系统的示例方法的流程图。
15.图6示出了用于自动同步后向感知系统的另一示例方法的流程图。
16.图7示出了用于后向感知系统的唤醒过程的示例方法的流程图。
17.图8示出了用于后向感知系统的休眠过程的示例方法的流程图。
18.图9示出了用于运行后向感知系统的示例方法的流程图。
19.图10示出了用于运行后向感知系统的另一示例方法的流程图。
20.图11示出了可以实施本文中所描述的一些技术的硬件平台的示例。
具体实施方式
21.因为在每辆汽车和卡车的后面都存在盲点,所以每年发生的倒车事故都会造成数千人受伤。通常,该盲点从较小汽车中的15英尺延伸至较大皮卡车和suv中的25英尺以上,并且对于牵引式拖车甚至延伸至更长的距离。人类驾驶员通常依赖于其在进入车辆进行驾驶之前对其车辆的后方进行的目视检查。然而,自主车辆不具有此机构。自主车辆的使用的增加使得使用对车辆的后方处和周围的物体的精确感知变得重要,尤其是在静态阻挡物、装货码头等周围进行机动(作为牵引式拖车的日常操作的一部分)的牵引式拖车的情况下变得重要。
22.倒车相机(且更一般而言,后向感知系统)可以在运行车辆时维持驾驶员的控制和可见度。例如,备用相机可以防止倒车越过某人(对幼儿和宠物特别敏感)或某物,并且可以辅助并行停车,同时避免对邻近车辆的损伤。在另一示例中,并且如果车辆被另一车辆撞到,那么后向感知系统可以出于保险目的提供事故发生的证据。
23.后向感知系统可以提高自主车辆的操作安全。不同于乘用车,在后向相机永久地安装在车辆中的情况下,自主车辆的一些应用可以仅偶尔使用后方感知系统。例如,在货运业务中,卡车驾驶室(驾驶舱或牵引车)通常附接至不同的货舱或拖车。因此,包括后方感知系统将是有用的,当卡车驾驶室附接至另一拖车时,该后方感知系统需要极少安装或不需要安装。具体地,在卡车驾驶员不必将电缆从拖车上的后方感知系统部分附接至驾驶舱中的显示器和其他电子器件的情况下将是有益的。在此类情况下,简单形成和启动后方感知系统节省了卡车驾驶员的额外时间且免去了卡车驾驶员的额外工作,并消除了在连接和设置系统时的人为错误。此外,运输服务提供者通常管理大量的拖车和驾驶舱,而卡车拖车在不使用时可能通常仅停置在停车场中。在此情况下,在与后方感知系统相关联的电子器件通过与未使用的拖车的简单拆离和同将与卡车驾驶舱配对并使用的另一拖车的附接而被投入使用的情况下将是理想的。
24.此系统的一些期望特征可以包括:(i)在半拖卡车的拖车上的安装能力,从而提供不具有盲点的完全后方感知;(ii)低成本且自供电的;(iii)易于安装和拆离的;(iv)用于与驾驶员进行无线通信的能力;(v)精确感知倒车路线中的所有物体的地点,以及(vi)提供
自动校准和同步。
25.本文中的所公开的技术提供了可以用于解决全自动车辆和半自动车辆的后向监测和控制中的上述和其他技术问题的解决方案。图1示出了安装在半拖卡车(通常被称为牵引式拖车)上的后向感知系统的示例。如其中所示,中央集成单元(ciu,125)、左拐角集成单元(liu,135
‑
1)和右拐角集成单元(riu,135
‑
2)安装在拖车115上,并且车辆控制单元(vcu,145)和远程信息处理盒155安装在牵引式拖车的牵引车105上。
26.在一些实施例中,图1中所示的后向感知系统的组件子集(ciu、liu和riu)可以有利地安装在拖车的后方和/或侧面上以在无盲点或盲区的情况下提供完整的后方感知覆盖范围。所公开的技术的实施例的其他有利特征包括但不限于电池或太阳能面板,以实现自供电能力(例如不依赖于电线或外部电源)、简易安装的能力(例如附接成稳固地固定且随后易于拆离)、无线通信能力,该能力使得不需要复杂的电气和机械构造,并且可以支持空中(ota)更新以及自动同步和校准能力。此外,ciu、liu和riu可以包括各种不同的传感器,可以融合这些传感器的信息,以使得能够精确地检测可能存在于车辆的后面的物体和/或人员。
27.在一些实施例中,ciu、liu和riu包括附接机构,该附接机构被配置为实现集成单元与车辆或牵引式拖车的拖车的简单可附接性和可拆离性。例如,附接机构可以是磁性面板,该磁性面板可以用于将集成单元容易地固定至拖车。在另一示例中,抽吸面板或钩扣件系统可以用于附接机构。
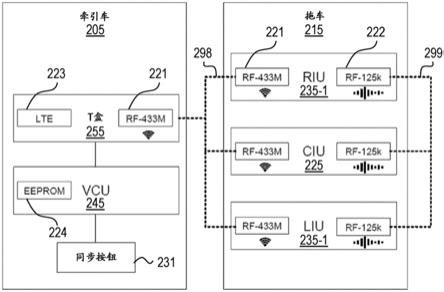
28.图2示出了示例后向感知系统的框图,并且是将功能(例如通信)子组件包封于图1的上下文中所描述的组件中的一个示例。如图2中所示,所公开的技术的实施例可以支持若干不同频率波段中的且使用多个标准的通信。该特征有利地为组件(或模块)提供在不干扰其他组件或模块的通信的情况下同时通信的能力。
29.在一些实施例中,并且如图2中所示,牵引车205包括vcu 245、远程信息处理盒255和同步按钮231(针对手动同步,稍后将在本文中对此进行讨论)。例如,远程信息处理盒可以包括双波段收发器,该双波段收发器支持使用lte标准223的通信以及超高频(uhf)波段221中的射频(rf)通信(例如使用低功率设备433mhz(lpd433))。lte收发器223可以由牵引车用来为驾驶员提供交通和地图服务的更新,而rf
‑
433m收发器221可以用于与附接至拖车215的ciu、liu和/或riu进行通信。在另一示例中,vcu 245可以包括eeprom(电可擦除可编程只读存储器)224,该eeprom可以被配置为存储后向感知系统的组件中的每个组件的地址和/或id,以便独立地向/从每个组件传输数据和控制信号。
30.在一些实施例中,并且如图1和图2中所示,拖车215可以包括ciu 225、liu 235
‑
1和riu 235
‑
2。在示例中,集成单元中的每个集成单元可以包括双波段收发器,该双波段收发器支持uhf波段中的以及低频(lf)波段中的rf通信。rf
‑
433m收发器221可以用于与牵引车中的vcu 245进行通信(如利用虚线298所指示),而125khz rfid(射频标识)模块222可以用于在集成单元之间进行通信(如利用虚线299所指示)。
31.在一些实施例中,不同频率波段和交替无线协议和设备可以在后向感知系统的操作中实施。例如,vcu和集成单元可以使用蓝牙、zigbee、基于802.11p无线标准的直接短程通信(dsrc)等。
32.图3示出了后向感知系统的示例中央集成单元(ciu)的框图。在一些实施例中,并
且如图3中所示,ciu可以包括七个模块:超声模块311、人机交互(hmi)模块312、雷达模块313、计算模块314、rf模块316、相机模块317和功率模块318。
33.在一些实施例中,超声模块311可以包括分别安装在拖车的左拐角和右拐角上的左传感器341和右传感器342。在示例中,超声模块311不仅可以用于检测物体的存在,而且还可以用于确定该物体与车辆相距的距离。在一些实施例中,相机模块317可以包括普通相机361和/或鱼眼相机362(例如以提供范围介于100
°
至180
°
的极宽视角)以提供车辆的后方周围的区域的视图。例如,超声模块311和/或相机模块317的输入可以独立地用于提供对在车辆后面的任何障碍物的精确感知。
34.在一些实施例中,在用于检测在车辆后面的障碍物和人员之前,可以来自相机模块317和超声模块311的输入加以组合或融合。例如,用超声模块311扩大相机模块317使得后向感知系统能够准确地确定物体与车辆相距的距离以及在弱光条件下或甚至在完全黑暗中运行。
35.在一些实施例中,雷达模块313可以包括24ghz雷达模块351,该雷达模块被配置为扩大相机模块317。例如,雷达模块313能够在任何天气条件下检测障碍物。对相机与雷达模块使得后向感知系统加以组合能够在存在雾或薄雾的情况下准确地运行,从而即使在不利情况下也确保自主车辆的安全。
36.在一些实施例中,hmi模块312可以包括同步按钮331、警报灯332和警报蜂鸣器333。例如,并且如稍后在该文中所讨论的,同步按钮331可以被配置为启动拐角集成单元,作为vcu与ciu、liu和riu之间的手动同步过程的一部分。在示例中,警报灯332和警报蜂鸣器333可以被配置为在后向感知系统可操作时提供视觉刺激和听觉刺激。
37.在一些实施例中,计算模块314包括微控制器单元(mcu,381)和基于微机电系统(mems)的惯性测量单元(imu)。例如,imu是电子设备,该电子设备使用加速度计与陀螺仪(有时还有磁力计)的组合来测量并报告主体的比力(specific force)、角速率并且有时还测量并报告主体周围的磁场。在示例中,mcu可以控制mems imu和/或其他组件,以确保后向感知系统正在以节能方式运行以确保车辆和人员的安全。
38.在一些实施例中,rf模块316包括支持uhf和lf波段中的rf通信的双波段收发器。rf
‑
433m收发器321可以用于与vcu进行通信,而125khz rfid模块322可以用于与liu和riu进行通信。在该示例中,uhf和lf频率波段在频率方面不重叠。在其他实施例中,双波段通信可以在时间上(例如使用tdma(时分多址))或在结构上(例如使用cdma(码分多址))正交。
39.在一些实施例中,功率模块318包括电池371和/或太阳能面板372。更一般而言,功率模块318是用于后向感知系统的各种组件的自供电源,该自供电源不需要与电网的恒定连接。在一些实施例中,可以对功率模块318进行周期性地再充电,以确保各种组件在车辆的操作期间如预期一般起作用。
40.图4示出了后向感知系统的示例拐角单元的框图。该示例包括与图3中所示的且如上文所描述的那些特征和/或组件类似的一些特征和/或组件。在该部分中可以不单独描述这些特征和/或组件中的至少一些特征和/或组件。在一些实施例中,并且如图4中所示,liu和/或riu可以包括五个模块:超声模块411、计算模块414、rf模块416、相机模块417和功率模块418。
41.在一些实施例中,相机模块417包括用于使ciu、liu和riu的相应的普通相机和鱼
眼相机保持清洁的机构。例如,相机清洁系统可以被配置为将清洁溶剂(或水)喷洒于相机镜头上,接着喷出空气以干燥相机镜头。在另一示例中,vcu可以为车辆的驾驶员提供指示或提示以确保在运行车辆之前相机是清洁的。
42.图5示出了用于手动地同步后向感知系统的示例方法的流程图。如图5中所示,当按下ciu上的同步按钮(例如如图3中所示的同步按钮331)时,手动同步过程500开始于步骤510。按下ciu同步按钮使用例如双波段收发器中的125khz rfid模块来传输触发信号(步骤530)。该触发信号可以是针对liu和riu的同步信号。
43.在一些实施例中,可以通过按下牵引车上的同步按钮(例如图2中的同步按钮231,该同步按钮可以位于车载诊断(obd)端口附近)来进行步骤510。ciu和vcu上的两个同步按钮的启动以及riu和liu的触发需要紧接着15至30秒的时间间隔(或等待时段)(步骤540)。如果在该手动同步过程期间该等待时段不可用(例如由于出于紧急原因而关闭车辆),那么该过程中止并退出(步骤570)。
44.通常,手动同步过程继续进行步骤550,其中ciu、liu和riu使用例如双波段收发器中的rf
‑
433m模块向vcu发送其标识信息。如果该过程成功(步骤560),vcu将id存储在eeprom(例如图2中的eeprom 224)中。如果id未成功保存在vcu中,那么手动同步过程中止(并退出,步骤580)。
45.图6示出了用于自动同步后向感知系统的另一示例方法的流程图。与在图5的上下文中所描述的手动同步过程相比,图6中所示的自动同步过程不需要任何手动干预,并且依赖于后向感知系统的组件的移动。例如,如果具有新安装的后向感知系统的牵引式拖车不需要首先向后移动(且因此不需要使用后向感知系统),那么牵引式拖车的向前移动可以触发如在图6的上下文中所描述的自动同步过程。
46.自动同步过程600开始于步骤610,其中以来自vcu的imu的一个或多个轴的信号的形式检测vcu的移动。在示例中,如果检测到的信号对应于小于1g的加速度(步骤620),那么自动同步过程终止(步骤670)。然而,如果检测到的信号对应于大于或等于1g的加速度(例如1g的加速度等同于在经过的每秒内大约为35公里/小时(或22英里/小时)的速度的变化速率),那么vcu使用例如双波段收发器中的rf
‑
433m模块来传输同步信号(步骤630)。
47.该同步信号由集成单元(ciu、liu、riu)接收,该集成单元随后传输与其对应imu(分别针对ciu和liu/riu,图3和图4中的imu 382和482)的轴对应的信号。检测来自ciu/liu/riu的imu信号(步骤640),并且如果imu信号与来自vcu的imu信号类似(步骤650),那么将来自集成单元的id存储在vcu eeprom中(步骤660,并且与图5中的步骤560类似)。然而,如果在来自vcu和集成单元的imu信号中存在不匹配(步骤650),那么自动同步过程终止(步骤670)。例如,牵引车可能刚刚将拖车递送于装货码头处,并且在从钩上取下拖车之后从该位置离开。在这种情况下,来自牵引车的imu信号将登记大于1g的加速度,但拖车imu信号将接近于0g,并且将不会发生同步(如预期的,由于牵引车未附接至拖车)。
48.在图5和图6的上下文中所描述的手动同步过程和自动同步过程通常可以在牵引车和拖车最初配对时分别执行。只要相同的牵引式拖车组合处于运行中,就不需要重复同步过程。另一方面,如果更换了拖车,那么可以将后向感知系统与原始拖车拆离,并且将其固定至新拖车上,并且可以执行手动同步过程或自动同步过程中的任一者。
49.在一些实施例中,所公开的技术的实施例实施唤醒过程和休眠过程来以节能方式
运行,从而使得自供电ciu、liu和riu能够在频繁地进行充电的情况下运行。图7和图8分别提供了后向感知系统的唤醒过程和休眠过程的示例。
50.图7示出了用于后向感知系统的唤醒过程的示例方法700的流程图。方法700包括:在步骤710中,基于可以手动触发或从车辆的操作中推断出的事件唤醒vcu。例如,如果车辆置于倒车档,那么vcu自动唤醒。
51.方法700包括:在步骤720中,vcu使用例如双波段收发器中的rf
‑
433m模块来传输唤醒信号。在一些实施例中,将唤醒信号引向ciu,ciu然后在从vcu接收到唤醒信号时唤醒(步骤730)。
52.在一些实施例中,响应于唤醒信号,ciu向vcu传输信号。另外,ciu使用例如双波段收发器中的125khz rfid模块向liu和riu发送触发信号(例如可以等同于从vcu接收到的唤醒信号的或与从vcu接收到的唤醒信号不同的唤醒信号)(步骤740)。在接收到该触发信号时,liu和riu唤醒(步骤750)。
53.唤醒过程结束于vcu从ciu、liu和riu接收到信号(步骤760),从而确认其主动操作模式。所公开的技术的实施例可以使用唤醒过程来确保后向感知系统以节能方式运行。
54.图8示出了用于后向感知系统的休眠过程的示例方法800的流程图。休眠过程从“休眠事件”开始,该“休眠事件”包括:vcu检测到不需要后向感知系统(步骤810)。例如,如果将车辆置于巡航控制中(这通常导致长时间的向前运动),那么vcu将此自动检测为休眠事件。在另一示例中,即使例如牵引式拖车在地磅站中排队并且不需要在整个过程中倒档,车辆的驾驶员也可以明确地触发休眠事件。
55.当检测到或启动了休眠事件时,vcu使用例如双波段收发器中的rf
‑
433m模块向拖车的后方处的集成单元传输休眠信号(步骤820)。在接收到休眠信号时,ciu、liu和riu切换至休眠模式(步骤830)。在一些实施例中,切换至休眠模式包括功率模块(例如分别针对ciu和liu/riu,图3和图4中的318和418),该功率模块关断一个或多个模块(例如超声模块、相机模块、雷达模块等)。在其他实施例中,功率模块可以将一个或多个模块切换到省电操作模式,其中相应模型的仅某些功能性是主动的。
56.图9示出了用于运行后向感知系统的示例方法900的流程图。在一些实施例中,后向感知系统包括两个拐角单元和中央单元,其中两个拐角单元(lie、riu)和中央单元(ciu)中的每一个至少包括相机模块、功率模块和双波段收发器。可以在ciu中实施的方法900包括:在步骤910中,与控制单元配对。在一些实施例中,配对包括:使用双波段收发器经由第一频率波段进行通信。在一些实施例中,功率模块包括电池。
57.方法900包括:在步骤920中,在成功配对时向两个拐角单元传输第一触发信号。在一些实施例中,第一触发信号经由与第一频率波段不重叠的第二频率波段而被传输。
58.方法900包括:在步骤930中,在已经传输了第一触发信号之后切换至主动模式。在一些实施例中,第一触发信号使两个拐角单元切换至主动模式。在一些实施例中,主动模式包括:将中央单元和两个拐角单元上的相机模块定向成提供车辆的后方周围的区域的无障碍视图。
59.在一些实施例中,并且如在至少图2至图4的上下文中所描述的,第一频率波段可以包括超高频(uhf)波段(例如433mhz频率波段),并且与第一频率波段不重叠的第二频率波段可以包括低频(lf)波段(例如125khz频率波段)。
60.在一些实施例中,并且如在图5的上下文中所描述的,配对操作还包括:响应于第一手动触发(例如按下ciu上的同步按钮)而经由第二频率波段向liu和riu传输同步信号;以及响应于第二手动触发(例如按下牵引车上的同步按钮),经由第一频率波段向vcu传输标识信号。
61.在一些实施例中,并且如在图6的上下文中所描述的,配对操作还包括:经由第一频率波段从vcu接收同步信号;以及传输与ciu的移动对应的信号(例如来自mems imu的指示大于1g的加速度以便继续进行自动同步过程的信号)。
62.在一些实施例中,并且如在图7的上下文中所描述的,方法900还包括:在成功配对时经由第一频率波段从vcu接收第一唤醒信号。ciu在接收到第一唤醒信号时醒来,并且随后经由第二频率波段触发liu和riu。一旦所有集成单元都醒来,vcu就从ciu、liu和riu接收信号,从而确认他们切换至主动模式。在示例中,切换至主动模式包括:将ciu、liu和riu的相机模块定向成提供车辆的后方周围的区域的无障碍视图。
63.在一些实施例中,并且如在图8的上下文中所描述的,方法900还包括:经由第二频率波段向liu和riu传输第二触发信号。在示例中,第二触发信号可以是休眠信号,并且ciu可以在传输第二触发信号之后切换至省电模式。另外,第二触发信号可以使liu和riu切换至省电模式。
64.更一般而言,并且在一些实施例中,vcu可以经由第一频率波段与ciu直接通信。随后,ciu可以经由第二频率波段与liu和riu(例如中继从vcu接收到的信息)进行通信。在其他实施例中,vcu可以与ciu、liu和riu中的每一个直接通信。
65.图10示出了用于运行后向感知系统的另一示例方法1000的流程图。该示例包括与图9中所示的且如上文所描述的那些特征和/或步骤类似的一些特征和/或步骤。在该部分中可以不单独描述这些特征和/或组件中的至少一些特征和/或组件。可以在liu和/或riu中实施的方法1000包括:在步骤1010中,通过使用双波段收发器经由第一频率波段进行通信来与控制单元配对。
66.方法1000包括:在步骤1020中,在成功配对时经由与第一频率波段不重叠的第二频率波段从中央单元接收触发信号。
67.方法1000包括:在步骤1030中,在接收到触发信号之后切换至与中央单元的操作模式相匹配的操作模式。在一些实施例中,操作模式可以是主动模式或省电模式。例如,省电模式可以包括:关闭相机模块,并且主动模式可以包括:将中央单元和两个拐角单元上的相机模块定向成提供车辆的后方周围的区域的无障碍视图。
68.图11示出了可以用于实施本文中所描述的技术中的一些技术的硬件平台1100的示例。例如,硬件平台1100可以实施方法900和/或1000,或可以实施本文中所描述的各种模块。硬件平台1100可以包括可以执行代码以实施方法的处理器1102。硬件平台1100可以包括可以用于存储处理器可执行代码和/或存储数据的存储器1104。硬件平台1100还可以包括通信接口1106。例如,通信接口1106可以实施本文中所描述的通信协议(lte、wi
‑
fi等)中的一个或多个通信协议。
69.可以利用各种系统、数字电子电路系统或利用计算机软件、固件或硬件(包括在本说明书中所公开的结构及其结构等效物)或利用他们中的一个或多个的组合来实施本专利文档中所描述的主题和功能操作和模块的实施方式。可以将本说明书中所描述的主题的实
施方式实施为一个或多个计算机程序产品,例如,编码在有形的且非暂时性的计算机可读介质上以供由数据处理装置执行或控制该数据处理装置的操作的计算机程序指令的一个或多个模块。计算机可读介质可以是机器可读存储设备、机器可读存储基板、存储器设备、影响机器可读传播信号的物质组合物或他们中的一个或多个的组合。术语“数据处理单元”或“数据处理装置”涵盖用于处理数据的所有装置、设备和机器,包括例如可编程处理器、计算机或多个处理器或计算机。除了硬件之外,装置还可以包括为探讨中的计算机程序创建执行环境的代码,例如,构成处理器固件、协议栈、数据库管理系统、操作系统或他们中的一个或多个的组合的代码。
70.可以用任何形式的编程语言(包括:编译语言或解译语言)来编写计算机程序(也被称作程序、软件、软件应用、脚本或代码),并且可以按照任何形式(包括:作为独立式程序或模块、组件、子例程或适合用于计算环境中的其他单元)来部署计算机程序。计算机程序并非必须与文件系统中的文件对应。可以将程序存储在保持其他程序或数据(例如存储在标记语言文档中的一个或多个脚本)的文件的一部分中,或存储在专用于所探讨中的程序的单个文件中,或存储在多个协作文件(例如存储一个或多个模块、子程序或部分代码的文件)中。可以将计算机程序部署为在一个计算机上执行或在位于一个站点处或分布在多个站点中并且通过通信网络互连的多个计算机上执行。
71.可以通过一个或多个可编程处理器来执行本说明书中所描述的过程和逻辑流程,该一个或多个可编程处理器执行一个或多个计算机程序以通过操作输入数据并且生成输出来执行动作。也可以通过专用逻辑电路系统(例如fpga(现场可编程门阵列)或asic(专用集成电路))来执行过程和逻辑流程,并且也可以将装置实施为该fpga或asic。
72.适合执行计算机程序的处理器包括例如通用微处理器、专用微处理器和任何种类的数字计算机的任何一个或多个处理器。一般而言,处理器将接收来自只读存储器或随机存取存储器或两者的指令和数据。计算机的必要元件是:用于执行指令的处理器和用于存储指令和数据的一个或多个存储器设备。一般而言,计算机还将包括用于存储数据的一个或多个海量存储设备(例如磁盘、磁光盘或光盘),或计算机可以操作地耦合以接收来自该海量存储设备的数据或将数据传送至该海量存储设备或进行两者。然而,计算机无需具有此类设备。适合存储计算机程序指令和数据的计算机可读介质包括所有形式的非易失性存储器、介质和存储器设备,包括例如半导体存储器设备,例如(e)eprom和闪存设备。处理器和存储器可以由专用逻辑电路系统补充或可以并入该专用逻辑电路系统中。
73.旨在将说明书连同附图一起仅视为示例性的,其中示例性是指示例。如本文中所使用的,除非上下文中另外明确指出,否则“或”旨在包括“和/或”。
74.虽然本专利文档包含许多细节,但不应该将这些细节解释为对任何发明或可能被要求的内容的范围的限制,而是作为可针对特定发明的特定实施例的特征的描述。在本专利文档中在单独实施例的上下文中描述的某些特征还可以组合地实施在单个实施例中。相反,在单个实施例的上下文中描述的各种特征也可以单独地或按照任何合适的子组合实施在多个实施例中。而且,尽管上文可以将特征描述为以某些组合来起作用并且最初甚至同样地对该特征进行了要求,但在一些情况下可以从组合中删除来自所要求的组合的一个或多个特征,并且所要求的组合可以涉及子组合或子组合的变化。
75.类似地,虽然在附图中按照特定顺序描绘了操作,但不应将其理解为需要按照所
示的特定顺序或按照相继的顺序来执行此类操作,或需要执行所有图示的操作以实现期望结果。而且,在本专利文档中所描述的实施例中的各种系统组件的分离不应被理解为在所有实施例中都需要此分离。
76.仅描述了几种实施方式和几个示例,并且可以基于本专利文档中所描述和说明的内容来制作其他实施方式、增强和变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1