一种矿用机械传动自卸车牵引辅助控制系统及控制方法与流程
[0001]
本发明涉及工程机械技术领域,具体涉及一种矿用机械传动自卸车牵引辅助控制系统及控制方法
背景技术:
[0002]
矿用机械传动自卸车广泛应用于大型露天矿、水利工程中,地形复杂,工况恶劣。矿用机械传动自卸车在泥泞湿滑的路况行驶时,极易出现车轮滑转的情况,地面附着力的下降,车辆难以获得较大的牵引力,导致车辆的起步、加速、湿滑路面通过能力的下降,也降低了行驶的稳定性。因此提高车辆与地面的附着力,抑制车辆在泥泞湿滑的路况的滑转,对提升车辆的动力性和稳定性能至关重要。
技术实现要素:
[0003]
本发明的目的在于提供一种矿用机械传动自卸车牵引辅助控制系统及控制方法,对车轮在打滑转进行有效分层次控制,以提高车辆行驶的稳定性。
[0004]
为实现上述目的,首先,本发明提供了一种矿用机械传动自卸车牵引辅助控制系统,包括牵引辅助控制器、左前车轮角速度传感器、右前车轮角速度传感器、左后车轮角速度传感器、右后车轮角速度传感器、发动机ecu、左后车轮电液比例阀、右后车轮电液比例阀、左后车轮制动器、右后车轮制动器;其中所述牵引辅助控制器用于采集所述左前轮角速度传感器、所述右前车轮角速度传感器、所述左后车轮角速度传感器、所述右后车轮角速度传感器的信号;用于控制所述发动机ecu;用于控制所述左后车轮电液比例阀、所述右后轮电液比例阀,并通过所述左后轮电液比例阀对所述左后轮制动器进行控制及通过所述右后轮电液比例阀对所述右全车轮电液比例阀对所述右后车轮控制动器进行控制。
[0005]
进一步地,还包括系统使能开关,所述系统使能开关与所述牵引辅助控制器电连接。
[0006]
进一步地,还包括喷油器,所述发动机ecu通过控制所述喷油器进行喷油量控制。
[0007]
另一方面,本发明还提供了一种基于权利要求1所述的矿用机械传动自卸车牵引导辅助控制系统的控制方法,其特征在于,包括如下步骤:
[0008]
自卸车运行时,首先检测所述系统使能开关是否按下,如果所述系统使能开关没有按下,自卸车运行在正常牵引控制模式;
[0009]
如果所述系统使能开关处于按下状态时,所述牵引辅助控制器采集左前车轮、左后车轮、右前车轮、右后车轮的角速度数据,根据采集到的数据计算左侧和右侧车轮滑转率是否偏离设定范围;
[0010]
如果左侧车轮和右侧车轮滑转率均没有偏离设定范围,自卸车进入正常牵引控制模式,否则系统认定自卸车单侧车轮或双侧车轮均出现了滑转,进入牵引辅助控制模式。
[0011]
进一步地,在牵引辅助控制模式下,根据工况的不同,自卸车会自动进入发动机输出功率控制模式或驱动轮制动控制模式。
[0012]
进一步地,在自卸车两侧车轮均出现滑转、发动机转速高时,系统优先进入发动机输出功率控制模式,通过减小发动机输出功率,控制车轮的滑转率。
[0013]
进一步地,如果减小发动机输出功率,车轮滑转率仍达不到目标范围,系统再辅以驱动轮制动控制。
[0014]
进一步地,在自卸车两侧车轮滑转率不一致且低速行驶时,系统进入驱动轮制动控制模式,通过车轮制动压力的调节,将滑转率控制在最佳范围之内。
[0015]
本发明的有益效果是:通过牵引辅助控制器检测车轮在不同转速下的车轮滑转率,采用不同的控制方式,有效防止了矿用机械传动自卸车在起步、加速和湿滑路面行驶时驱动轮的滑转,提升了车辆牵引的动力性和稳定性,降低了燃油消耗,实用性强。
附图说明
[0016]
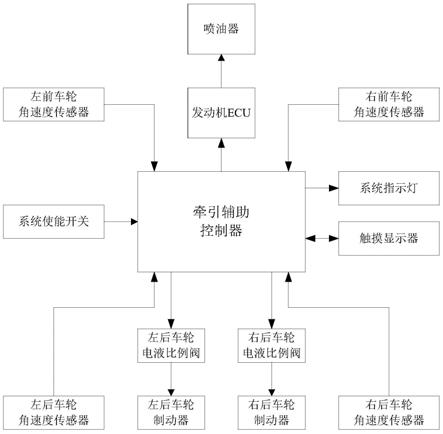
图1是本发明的控制系统框图;
[0017]
图2是本发明的控制流程图;
[0018]
图3是驱动轮的实际滑转率s和理想滑转率s
c
比较过程图;
具体实施方式
[0019]
下面结合附图及具体实施例对本发明作进一步详细说明。
[0020]
如图1所示,一种矿用机械传动自卸车牵引辅助控制系统,包括牵引辅助控制器、左前车轮角速度传感器、右前车轮角速度传感器、左后车轮角速度传感器、右后车轮角速度传感器、发动机ecu、左后车轮电液比例阀、右后车轮电液比例阀、左后车轮制动器、右后车轮制动器。在车辆前轮安装左前车轮角速度传感器、右前车轮角速度传感器,在车辆后轮安装左后车轮角速度传感器、右后车轮角速度传感器。左前轮和右前轮为非驱动轮,左后轮和右后轮为驱动轮。牵引辅助控制器采集左前车轮角速度传感器、右前车轮角速度传感器、左后车轮角速度传感器、右后车轮角速度传感器数据,进行处理和运算。系统还包括系统使能开关和喷油器,系统使能开关与牵引辅助控制器电连接,发动机ecu通过控制喷油器进行喷油量控制,牵引辅助控制器向发动机ecu发送指令,控制喷油器喷油量,实现发动机输出功率控制。在左后车轮和右后车轮处分别安装左后车轮制动器、右后车轮制动器,牵引辅助控制器控制左后车轮电液比例阀和右后车轮电液比例阀,实现左后车轮制动器、右后车轮制动器压力调节。系统还包括系统指示灯和触摸显示屏,系统指示灯用于提醒驾驶员注意相关驾驶操作,确保行车安全,触摸显示屏用于系统相关参数的显示和设定。系统使能开关、系统指示灯、触摸显示屏均安装在驾驶室内。
[0021]
如图2所示,本发明还提供了一种矿用机械传动自卸车牵引辅助控制的方法,包括如下步骤:
[0022]
当自卸车运行时,首先检测所述系统使能开关是否按下,当系统使能开关没有按下时,车辆处于正常牵引控制模式。当系统使能开关按下时,牵引辅助控制器采集左前车轮轮缘角速度w1、左后车轮轮缘角速度w2、右前车轮轮缘角速度w3、右后车轮角速度w4,计算得到车辆左侧车轮滑转率:
[0023]
式中,r0为轮胎滚动半径。
[0024]
车辆右侧车轮滑转率:
[0025][0026]
设定s
c
为系统理想滑转率,将计算得到的左侧车轮滑转率s
l
和右侧车轮滑转率s
r
与设定理想滑转率s
c
比较,判断差值是否偏离设定范围。如果左侧车轮滑转率s
l
和右侧车轮滑转率s
r
没有偏离设定范围,车辆进入正常牵引控制模式。如果左侧车轮滑转率s
l
或右侧车轮滑转率s
r
偏离设定范围,车辆进入牵引辅助控制模式。
[0027]
在牵引辅助控制模式下,根据工况的不同,自卸车会自动进入发动机输出功率控制模式或驱动轮制动控制模式。
[0028]
当发动机转速较高时,系统优先进入发动机输出功率控制模式,通过减小发动机输出功率,控制车轮的滑转率。如果减小发动机输出功率,车轮滑转率仍达不到目标范围,系统再辅以驱动轮制动控制。当发动机转速较低时,系统进入驱动轮制动控制模式,通过驱动轮制动压力的调节,将滑转率控制在最佳范围之内。
[0029]
如图3所示,为驱动轮的实际滑转率s和理想滑转率s
c
的具体比较过程。
[0030]
当车辆驱动轮出现滑转时,计算得到两侧驱动轮即左后车轮和右后车轮的实际滑转率s。这里的s就是上文提到的s
l
和s
r
。将驱动轮的实际滑转率s和理想滑转率s
c
比较,得到滑转率偏差:
[0031]
e(k)=s-s
c
ꢀꢀꢀꢀꢀ
(3)
[0032]
发动机输出功率控制模式下,根据滑转率偏差数值e(k),牵引辅助控制器对发动机ecu和喷油器进行pid算法控制,向发动机ecu发送指令,控制喷油器的喷油量,减小发动机输出功率。系统对滑转率偏差e(k)不断的循环控制,直到实际滑转率s达到设定范围为止。
[0033]
驱动轮制动控制模式下,根据滑转率偏差数值e(k),牵引辅助控制器对左后车轮电液比例阀或右后车轮电液比例阀进行pid算法控制。牵引辅助控制器通过pwm脉冲宽度调试方法,控制左后车轮电液比例阀或右后车轮电液比例阀状态,使左后车轮制动器或右后车轮制动器处于增压制动、保压制动、减压制动状态。系统对滑转率偏差e(k)不断的循环控制,直到实际滑转率s达到设定范围为止。
[0034]
牵引辅助控制模式下,pid算法控制传递函数为:
[0035][0036]
式中t为采样周期,k
p
为比例系数,t
i
为积分函数,t
d
为微分系数。
[0037]
本发明设置多种控制方式,在多种情况下对车辆打滑进行控制,有效提升车辆牵引的动力性和稳定性。
[0038]
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下可以作出的各种变化,都处于本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1