一种电液混合制动装置的制作方法
1.本发明涉及汽车线控技术领域,特别是涉及一种电液混合制动装置。
背景技术:
2.现有的制动系统主要分为机械式线控制动系统和液压式线控制动系统。
3.目前机械式线控刹车emb技术呈现许多优势,比如:整个系统中没有连接制动管路,结构简单,体积小,信号通过电传播,反应灵敏,减小制动距离,工作稳定,维护简单,没有液压油管路,不存在液压油泄露问题等等。但现阶段,该技术并未成熟,很少有在传统车辆上装配。
4.并且,传统液压式线控制动大多数基于电子制动踏板有人驾驶线控制动方案。但是对于低速无人车而言,由于没有驾驶室,缺少制动踏板,驾驶人员很难对其进行精确现行控制,尤其是在雨雪、急转弯工况行驶时,极易发生侧翻。
5.因此,提供一种新型线控制动系统以提高低速无人车行驶的稳定性和安全性,是本领域亟待解决的一个技术难题。
技术实现要素:
6.本发明的目的是提供一种电液混合制动装置,以在完成对低速无人车精确控制的同时,提高低速无人车行驶的稳定性和安全性。
7.为实现上述目的,本发明提供了如下方案:
8.一种电液混合制动装置,包括:制动机械系统、数据采集系统、esp系统和工控系统;
9.所述制动机械系统和所述esp系统共用同一主缸;所述数据采集系统设置在所述制动机械系统上,用于采集车辆数据;所述车辆数据包括:低速无人车的轮速和车身姿态;
10.所述数据采集系统和所述esp系统电连接;所述esp系统用于根据所述车辆数据判断所述低速无人车是否发生侧翻,并根据判断结果生成车轮力矩分配信号;
11.所述esp系统与所述工控系统电连接;所述工控系统和所述制动机械系统电连接;所述工控系统用于根据所述车轮力矩分配信号生成制动指令以控制所述制动机械系统,并用于获取气象数据将所述气象数据反馈给所述esp系统,所述esp系统结合所述气象数据生成所述车轮力矩分配信号;所述制动指令包括转弯指令和紧急制动指令。
12.优选地,所述制动机械系统包括:制动电机回路、液压回路和抱闸装置;
13.所述制动电机回路和所述抱闸装置用于接收所述工控系统的指令并进行相应的动作,所述制动电机回路与所述液压回路配合形成制动。
14.优选地,所述数据采集系统包括:轮速传感器和运动姿态传感器;
15.所述轮速传感器和所述运动姿态传感器均与所述esp系统电连接;所述轮速传感器用于检测所述低速无人车的轮速;所述运动姿态传感器用于检测所述低速无人车的车身姿态。
16.优选地,所述esp系统包括:控制单元;
17.所述控制单元根据所述数据采集系统采集到的所述车辆数据生成车轮力矩分配信号。
18.优选地,所述工控系统包括整车控制器和气象接收器;
19.所述整车控制器用于根据所述车轮力矩分配信号生成制动指令以控制所述制动机械系统;
20.所述气象接收器用于获取气象数据并将所述气象数据反馈给所述esp系统。
21.优选地,所述整车控制器与所述数据采集系统电连接;
22.所述整车控制器用于根据所述数据采集系统采集到的所述车辆数据确定所述低速无人车的四轮压力和动作时间,并将所述四轮压力和所述动作时间反馈给所述esp系统,所述esp系统结合所述气象数据和低速无人车行驶路况生成制动时间后传输给所述整车控制器以生成制动指令。
23.优选地,所述电液混合制动装置还包括:无线收发系统和上位机;
24.所述无线收发系统与所述工控系统电连接;所述无线收发系统与所述上位机进行数据交互;所述上位机用于接收所述无线收发系统传输的数据信号,并用于根据所述数据信号生成制动指令后传输给所述无线收发系统。
25.优选地,所述无线收发系统为无线通信模块、4/5g通信模块或卫星通讯模块。
26.优选地,所述电液混合制动装置还包括:防撞系统;
27.所述防撞系统与所述工控系统电连接;所述防撞系统用于检测所述低速无人车是否与障碍物发生碰撞,并将检测结果发送给所述工控系统,所述工控系统根据所述检测结果生成控制指令。
28.优选地,所述防撞系统包括:防撞检测条和摄像头;
29.所述防撞检测条用于感知所述低速无人车是否与障碍物发生碰撞,所述摄像头用于拍摄所述低速无人车的行驶环境;
30.当防撞检测条感知到所述低速无人车与障碍物发生碰撞时,所述工控系统生成紧急制动指令并反馈给所述esp系统,所述esp系统根据所述紧急制动指令生成力矩分配信号,以保持所述低速无人车的车身稳定;当防撞检测条感知不到所述低速无人车与障碍物发生碰撞时,所述工控系统根据所述摄像头拍摄的所述行驶环境确定是否发生预碰撞,当发生预碰撞时,生成预碰撞时间,并反馈给所述esp系统,所述esp系统根据所述预碰撞时间生成力矩分配信号,以确保车身行驶的稳定性。
31.根据本发明提供的具体实施例,本发明公开了以下技术效果:
32.本发明提供的电液混合制动装置,通过将esp系统植入到ehb系统(线控制动系统)中,能够对低速无人车在恶劣的行驶工况条件下,保持车身的稳定,并且摒弃了现有esp系统必须人为给定踏板信号的弊端,提高信号响应效率。并且,采用共用主缸的方式,进一步能够在缩减无人车制动控制系统的整体结构的同时,降低生产成本。
附图说明
33.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施
例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
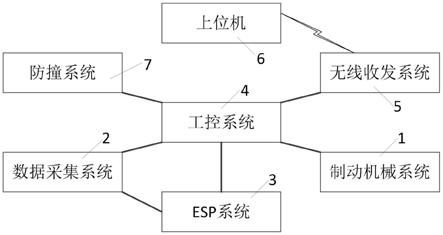
34.图1为本发明提供的电液混合制动装置的结构原理图。
35.符号说明:
[0036]1‑
制动机械系统,2
‑
数据采集系统,3
‑
esp系统,4
‑
工控系统,5
‑
无线收发系统,6
‑
上位机,7
‑
防撞系统。
具体实施方式
[0037]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0038]
本发明的目的是提供一种电液混合制动装置,以在完成对低速无人车精确控制的同时,提高低速无人车行驶的稳定性和安全性。
[0039]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0040]
图1为本发明提供的电液混合制动装置的结构原理图,如图1所示,一种电液混合制动装置,包括:制动机械系统1、数据采集系统2、esp系统3和工控系统4。
[0041]
制动机械系统1和esp系统3共用同一主缸。数据采集系统2设置在制动机械系统1上,用于采集车辆数据。车辆数据包括:低速无人车的轮速和车身姿态。
[0042]
数据采集系统2和esp系统3电连接。esp系统3用于根据车辆数据判断低速无人车是否发生侧翻,并根据判断结果生成车轮力矩分配信号。
[0043]
esp系统3与工控系统4电连接。工控系统4和制动机械系统1电连接。工控系统4用于根据车轮力矩分配信号生成制动指令以控制制动机械系统1,并用于获取气象数据,并将气象数据反馈给esp系统3,esp系统3结合气象数据生成车轮力矩分配信号。制动指令包括转弯指令和紧急制动指令。
[0044]
其中,上述制动机械系统1优选包括:制动电机回路、液压回路和抱闸装置。
[0045]
制动电机回路和抱闸装置用于接收工控系统的指令并进行相应的动作,制动电机回路与液压回路配合形成制动。
[0046]
上述数据采集系统2优选包括:轮速传感器和运动姿态传感器。
[0047]
轮速传感器和运动姿态传感器均与esp系统电连接。轮速传感器用于检测低速无人车的轮速。运动姿态传感器用于检测低速无人车的车身姿态。
[0048]
上述esp系统3优选包括:控制单元。控制单元根据数据采集系统采集到的车辆数据生成车轮力矩分配信号。
[0049]
上述工控系统4优选包括整车控制器和气象接收器。
[0050]
整车控制器用于根据车轮力矩分配信号生成制动指令以控制制动机械系统1。
[0051]
气象接收器用于获取气象数据并将气象数据反馈给esp系统3。
[0052]
优选地,上述整车控制器与数据采集系统2电连接。整车控制器用于根据数据采集系统采集到的车辆数据确定低速无人车的四轮压力和动作时间,并将四轮压力和动作时间
反馈给esp系统,esp系统结合气象数据和低速无人车行驶路况生成制动时间后传输给整车控制器以生成制动指令。
[0053]
进一步为了提高车辆运行的安全性,本发明提供的电液混合制动装置还包括:无线收发系统5和上位机6。
[0054]
无线收发系统5与工控系统4电连接。无线收发系统5与上位机6进行数据交互。上位机6用于接收无线收发系统5传输的数据信号,并用于根据数据信号生成制动指令后传输给无线收发系统5。
[0055]
其中,上述无线收发系统5为无线通信模块、4/5g通信模块或卫星通讯模块。
[0056]
此外,为了进一步杜绝低速无人车在发生碰撞时侧翻,在本发明提供的电液混合制动装置还优选包括:防撞系统7。
[0057]
防撞系统7与工控系统4电连接。防撞系统7用于检测低速无人车是否与障碍物发生碰撞,并将检测结果发送给工控系统4,工控系统4根据检测结果生成控制指令。
[0058]
其中,上述防撞系统优选包括:防撞检测条和摄像头。
[0059]
防撞检测条用于感知低速无人车是否与障碍物发生碰撞,摄像头用于拍摄低速无人车的行驶环境。
[0060]
当防撞检测条感知到低速无人车与障碍物发生碰撞时,工控系统4生成紧急制动指令并反馈给esp系统3,esp系统3根据紧急制动指令生成力矩分配信号,以保持低速无人车的车身稳定。当防撞检测条感知不到低速无人车与障碍物发生碰撞时,工控系统4根据摄像头拍摄的行驶环境确定是否发生预碰撞,当发生预碰撞时,生成预碰撞时间,并反馈给esp系统3,esp系统3根据预碰撞时间生成力矩分配信号,以确保车身行驶的稳定性。
[0061]
下面以雨雪天气为例,对本发明提供的电液混合制动装置的制动性能进行说明,在具体应用过程中,本发明提供的技术方案也可应用于其他场合的无人车控制。
[0062]
气象采集模块获取到当前天气为雨雪天气时,工控系统结合数据采集系统采集到的车辆数据和气象数据判断雨雪是否降落,并将判断信号反馈给esp系统。
[0063]
当判断为发生雨雪时,esp系统根据数据采集系统采集的车辆数据判断得到低速无人车进行转向行驶时,esp系统根据当前车辆数据生成车轮力矩分配信号,例如低速无人车在路滑时左拐且过度转向(转弯太急)时,会向右侧甩尾,此时,esp系统感觉到滑动就会迅速产生一种与右侧甩尾相反的转矩分配信号,工控系统接收到该车轮力矩分配信号后迅速生成预支匹配的控制指令以作用到制动机械系统,进而保持车身行驶的稳定性。
[0064]
当碰撞系统感知到低速无人车发生碰撞时,工控系统生成紧急制动指令并反馈给esp系统,esp系统根据紧急制动指令和数据采集系统采集的车辆数据迅速生成力矩分配信号,以保持低速无人车不发生侧翻。
[0065]
当碰撞系统中的摄像头拍摄到低速无人车行驶路线上存在障碍物时,工控系统根据摄像头拍摄的行驶环境确定障碍物位置以及预碰撞时间,并反馈给esp系统,esp系统根据预碰撞时间生成力矩分配信号,以躲避障碍物或在停车后确保车身行驶的稳定性。
[0066]
综上,本发明提供的电液混合制动装置相较于现有技术具有以下优点:
[0067]
1、通过将esp系统植入到ehb系统(线控制动系统)中,能够对低速无人车在恶劣的行驶工况条件下,保持车身的稳定,并且摒弃了现有esp系统必须人为给定踏板信号的弊端,提高信号响应效率。
[0068]
2、采用共用主缸的方式,进一步能够在缩减无人车制动控制系统的整体结构的同时,降低生产成本。
[0069]
3、采用碰撞系统和esp系统,能够精确感知或预判碰撞,以杜绝车辆发生侧翻。
[0070]
4、采用无线收发系统和上位机,远程控制低速无人车的行驶,提高控制适用性。
[0071]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0072]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1