基于少齿差行星齿轮和孔销式机构的双电机动力耦合系统的制作方法
[0001]
本实用新型涉及机械传动技术领域,尤其是基于少齿差行星齿轮和孔销式机构的双电机动力耦合系统。
背景技术:
[0002]
目前,纯电动汽车动力传动系统大多采用单电机配备单个减速器的方法,经常出现“大马拉小车”的情况。为了改善纯电动汽车的动力性和经济性,从改善传动系统结构角度出发,目前已经有很多种结构形式的双电机动力耦合系统。现有的齿轮耦合系统基本采用单排或者双排行星齿轮,而少齿差行星齿轮用行星轮转臂代替中心轮,通过孔销式盘型输出机构将行星轮为平面运动转化为定轴转动。相比较于单排或者双排行星齿轮机构,少齿差行星齿轮机构具有结构简单、尺寸小、重量轻、传动平稳可靠、传动效率高、传动比范围大、加工简单等优点,可以实现不同动力源的耦合。
技术实现要素:
[0003]
本实用新型提出基于少齿差行星齿轮和孔销式机构的双电机动力耦合系统,不仅结构简单、尺寸小、重量轻,传动平稳可靠,而且传动效率高、传动比范围大、加工简单。
[0004]
本实用新型采用以下技术方案。
[0005]
基于少齿差行星齿轮和孔销式机构的双电机动力耦合系统,所述动力耦合系统包括与动力源输出端依次相连的少齿差行星齿轮机构、孔销式机构;所述少齿差行星齿轮机构包括与内齿轮(6)啮合的行星轮(7),所述内齿轮由动力源内的主电机(1)或副电机(2)中的至少一个电机驱动;所述孔销式机构以输出圆盘(9)的圆柱销(8)插置于行星轮(7)的销孔内,使输出圆盘与行星轮组合为传动机构;所述少齿差行星齿轮机构包括驱动模式切换器件;所述驱动模式切换器件可使少齿差行星齿轮机构的工作模式在主电机单独驱动模式、双电机转速耦合驱动模式、倒车驱动模式之间切换;所述驱动模式切换器件包括与副电机相连的副电机离合器(3),还包括与内齿轮相邻的内齿轮制动器(4)。
[0006]
所述少齿差行星齿轮机构中;所述内齿轮为与主电机输出轴转子相连的渐开线内齿轮;所述行星轮以转臂(5)与主电机输出轴转子相连;当主电机输出轴旋转时,所述转臂与内齿轮同轴转动;所述副电机以副电机离合器与内齿轮相连。
[0007]
所述转臂为曲臂结构,转臂一端与主电机相连,另一端以轴承支撑于行星轮(7)的中心孔处。
[0008]
所述行星轮的辐板处沿行星轮圆周均匀设置六个销孔;所述输出圆盘与销孔对的位置处均匀设置六个圆柱销;所述输出圆盘的圆柱销插置于行星轮的销孔内;所述内齿轮(6)与行星轮(7)的中心距偏差等于销孔与圆柱销的半径差;所述内齿轮与行星轮的齿数差范围为1~4。
[0009]
当行星轮驱动输出圆盘等速同向旋转时,各圆柱销与各销孔孔壁始终接触,所述内齿轮的齿轮圆心、输出圆盘的圆盘圆心、圆柱销的截面圆心、销孔的截面圆心的连线呈平
行四边形;所述内齿轮与行星轮的齿数差范围为1~4。
[0010]
所述少齿差行星齿轮机构的传动比i<0,行星轮转动方向与主电机转动方向相反。
[0011]
所述孔销式机构的输出圆盘经传动轴(10)、主减速器(11)、差速器(12) 驱动电动汽车的车轮(13)。
[0012]
当少齿差行星齿轮机构的工作模式为主电机单独驱动模式时,副电机离合器断开副电机与内齿轮之间的传动连接,所述内齿轮制动器对内齿轮进行锁止,动力源中仅主电机工作,主电机的动力传至转臂,转臂带动行星轮转动,行星轮带动孔销式机构的输出圆盘转动,使主电机动力输送至传动轴,经主减速器、差速器传递至车轮;
[0013]
当少齿差行星齿轮机构的工作模式为双电机转速耦合驱动模式时,副电机离合器导通副电机与内齿轮之间的传动连接,主电机、副电机的转向相反,主电机、副电机的动力经内齿轮与行星轮的传动耦合而叠加为联合动力,所述联合动力驱动孔销式机构的输出圆盘转动,使主电机、副电机动力叠加形成的联合动力输送至传动轴,经主减速器、差速器传递至车轮;
[0014]
当少齿差行星齿轮机构的工作模式为倒车驱动模式时,副电机离合器断开副电机与内齿轮之间的传动连接,所述内齿轮制动器对内齿轮进行锁止,动力源中仅主电机工作,且主电机转向与主电机单独驱动模式、双电机转速耦合驱动模式相反,使车轮的转向与主电机单独驱动模式、双电机转速耦合驱动模式相反。
[0015]
当少齿差行星齿轮机构的工作模式为主电机单独驱动模式或双电机转速耦合驱动模式时,电动汽车向前行驶,当少齿差行星齿轮机构的工作模式为倒车驱动模式时,电动汽车向后行驶。
[0016]
当少齿差行星齿轮机构的工作模式为主电机单独驱动模式时,内齿轮与输出圆盘的转速关系满足公式转矩关系满足公式
[0017]
其中,z1,z2分别为内齿轮和行星轮的齿数,且z1>z2,ω
h
和t
h
分别为转臂的转速和转矩,ω1和t1分别为内齿轮转速和转矩,ω
v
和t
v
分别为输出圆盘的转速和转矩,与行星轮转速和转矩大小相等;
[0018]
此时内齿轮转速为0,传动比为因此转速关系满足:转矩关系满足:
[0019]
当少齿差行星齿轮机构的工作模式为双电机转速耦合驱动模式时,
[0020]
内齿轮与输出圆盘的转速关系满足公式转矩关系满足
[0021]
与现有技术相比,本实用新型具有以下优越功效:
[0022]
该系统结构紧凑,尺寸小,设计合理,控制简单,通过对离合器、制动器以及对电机转向的控制便可以实现单电机独立驱动以及双电机转速耦合驱动,有效解决纯电动汽车多
动力源的耦合问题,可以满足车辆运行中所需的各种工况,具有很好的应用前景。
附图说明
[0023]
下面结合附图和具体实施方式对本实用新型进一步详细的说明:
[0024]
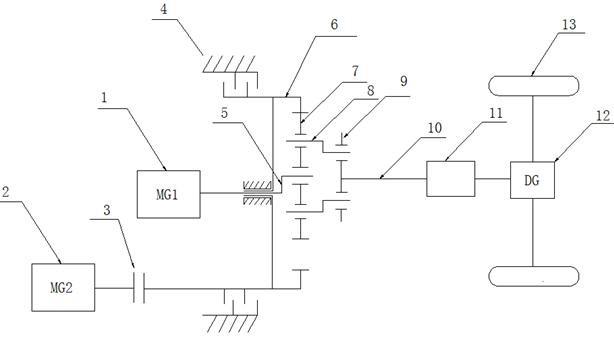
附图1是本实用新型的示意图;
[0025]
附图2是输出圆盘与内齿轮的配合示意图;
[0026]
附图3是输出圆盘与内齿轮的另一配合示意图;
[0027]
图中:1-主电机;2-副电机;3-副电机离合器;4-内齿轮制动器;5-转臂;6
-ꢀ
内齿轮;7-行星轮;8-圆柱销;9-输出圆盘;10-传动轴;11-主减速器;12-差速器;13-车轮。
具体实施方式
[0028]
如图所示,基于少齿差行星齿轮和孔销式机构的双电机动力耦合系统,所述动力耦合系统包括与动力源输出端依次相连的少齿差行星齿轮机构、孔销式机构;所述少齿差行星齿轮机构包括与内齿轮6啮合的行星轮7,所述内齿轮由动力源内的主电机1或副电机2中的至少一个电机驱动;所述孔销式机构以输出圆盘9的圆柱销8插置于行星轮7的销孔内,使输出圆盘与行星轮组合为传动机构;所述少齿差行星齿轮机构包括驱动模式切换器件;所述驱动模式切换器件可使少齿差行星齿轮机构的工作模式在主电机单独驱动模式、双电机转速耦合驱动模式、倒车驱动模式之间切换;所述驱动模式切换器件包括与副电机相连的副电机离合器3,还包括与内齿轮相邻的内齿轮制动器4。
[0029]
所述少齿差行星齿轮机构中;所述内齿轮为与主电机输出轴转子相连的渐开线内齿轮;所述行星轮以转臂5与主电机输出轴转子相连;当主电机输出轴旋转时,所述转臂与内齿轮同轴转动;所述副电机以副电机离合器与内齿轮相连。
[0030]
所述转臂为曲臂结构,转臂一端与主电机相连,另一端以轴承支撑于行星轮7的中心孔处。
[0031]
所述行星轮的辐板处沿行星轮圆周均匀设置六个销孔;所述输出圆盘与销孔对的位置处均匀设置六个圆柱销;所述输出圆盘的圆柱销插置于行星轮的销孔内;所述内齿轮6与行星轮7的中心距偏差等于销孔与圆柱销的半径差;所述内齿轮与行星轮的齿数差范围为1~4。
[0032]
当行星轮驱动输出圆盘等速同向旋转时,各圆柱销与各销孔孔壁始终接触,所述内齿轮的齿轮圆心、输出圆盘的圆盘圆心、圆柱销的截面圆心、销孔的截面圆心的连线呈平行四边形;所述内齿轮与行星轮的齿数差范围为1~4。
[0033]
所述少齿差行星齿轮机构的传动比i<0,行星轮转动方向与主电机转动方向相反。
[0034]
所述孔销式机构的输出圆盘经传动轴10、主减速器11、差速器12驱动电动汽车的车轮13。
[0035]
当少齿差行星齿轮机构的工作模式为主电机单独驱动模式时,副电机离合器断开副电机与内齿轮之间的传动连接,所述内齿轮制动器对内齿轮进行锁止,动力源中仅主电机工作,主电机的动力传至转臂,转臂带动行星轮转动,行星轮带动孔销式机构的输出圆盘转动,使主电机动力输送至传动轴,经主减速器、差速器传递至车轮;
[0036]
当少齿差行星齿轮机构的工作模式为双电机转速耦合驱动模式时,副电机离合器
导通副电机与内齿轮之间的传动连接,主电机、副电机的转向相反,主电机、副电机的动力经内齿轮与行星轮的传动耦合而叠加为联合动力,所述联合动力驱动孔销式机构的输出圆盘转动,使主电机、副电机动力叠加形成的联合动力输送至传动轴,经主减速器、差速器传递至车轮;
[0037]
当少齿差行星齿轮机构的工作模式为倒车驱动模式时,副电机离合器断开副电机与内齿轮之间的传动连接,所述内齿轮制动器对内齿轮进行锁止,动力源中仅主电机工作,且主电机转向与主电机单独驱动模式、双电机转速耦合驱动模式相反,使车轮的转向与主电机单独驱动模式、双电机转速耦合驱动模式相反。
[0038]
当少齿差行星齿轮机构的工作模式为主电机单独驱动模式或双电机转速耦合驱动模式时,电动汽车向前行驶,当少齿差行星齿轮机构的工作模式为倒车驱动模式时,电动汽车向后行驶。
[0039]
当少齿差行星齿轮机构的工作模式为主电机单独驱动模式时,内齿轮与输出圆盘的转速关系满足公式转矩关系满足公式
[0040]
其中,z1,z2分别为内齿轮和行星轮的齿数,且z1>z2,ω
h
和t
h
分别为转臂的转速和转矩,ω1和t1分别为内齿轮转速和转矩,ω
v
和t
v
分别为输出圆盘的转速和转矩,与行星轮转速和转矩大小相等;
[0041]
此时内齿轮转速为0,传动比为因此转速关系满足:转矩关系满足:
[0042]
当少齿差行星齿轮机构的工作模式为双电机转速耦合驱动模式时,
[0043]
内齿轮与输出圆盘的转速关系满足公式转矩关系满足
[0044]
在本实施例中,各部件的工作状态如下表所示:
[0045][0046]
以上所述仅为本实用新型的较佳实施例,凡在本实用新型的精神原则之内做出的等同修改、替换、改进,皆应属本实用新型的涵盖范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1