一种近程遥控泊车系统
1.本实用新型涉及智能车技术领域,具体涉及一种智能车近程遥控泊车技术。
背景技术:
2.目前随着车辆的不断普及以及城市人口的不断增加,车辆停车位资源越来越紧缺,导致车库或者停车场的车位越来越窄,尤其是当旁边车位车辆停偏了的情况下,会导致本车车辆停进去后,驾驶员无法下车的尴尬。目前近程遥控泊车技术可以解决此类问题,而成为智能驾驶技术的刚性需求。同时也可以解决大多数不擅长泊车的驾驶员的泊车难题。
3.目前主流的近程遥控泊车系统需要peps(passive entry passive start)无钥匙进入及启动系统和esp(electronic stability program)车身电子稳定系统配合才能满足相应的asil(automotive safety integration level)汽车安全完整性等级要求以及失效操作的设计要求,存在协作困难,开发费用高以及后续安全风险责任划分困难的问题。急需要整车厂和零部件企业联合开发一套近程遥控泊车系统,既满足功能安全要求,同时又具有安全独立性,不过分依赖于别的零部件系统,降低系统开发难度,同时明确安全风险责任。
技术实现要素:
4.本实用新型所要解决的技术问题是针对现有近程遥控泊车辅助系统存在对peps和esp系统依赖性较强,协作开发困难,开发费用高以及安全责任风险较难划分的问题,在现有泊车辅助系统的基础上以及现有底盘控制系统的基础上,提出一种近程遥控泊车系统。
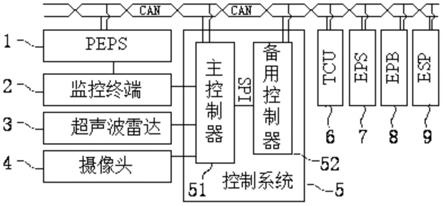
5.为了实现上述目的,本实用新型采用的技术方案为:一种近程遥控泊车系统,peps、控制系统、tcu、esp、epb、esp均连接can总线并通过can总线通信,监控终端通过蓝牙信号与peps通信并向peps发出远程点火信号,所述监控终端通过蓝牙信号与控制系统通信并向控制系统发出车辆控制信号,所述监控终端为遥控钥匙和/或移动设备。
6.所述控制系统包括通过spi通信的主控制器和备用控制器,所述主控制器和备用控制器均连接can总线,所述主控制器和备用控制器均通过蓝牙信号与监控终端通信。
7.所述控制系统连接有超声波雷达,所述超声波雷达设有12个,其中四个超声波雷达固定在车辆前方用于检测车辆前方障碍物以及测量车辆前方与障碍物的距离,其中四个超声波雷达固定在车辆后方用于检测车辆后方障碍物以及测量车辆后方与障碍物的距离,车辆的两侧均固定有两个超声波雷达用于检测车辆侧面障碍物以及测量车辆侧面与障碍物的距离,同时当车辆侧方位泊车时,用于检测侧面是否有车位以及辅助找到合适的车位。
8.所述控制系统连接有摄像头,所述摄像头为四个鱼眼摄像头,分别为车辆的四周用于识别车位线,寻找车位、辅助超声波雷达识别四周行人和障碍物,以及应用于全景泊车辅助系统。
9.本近程遥控泊车系统与现有主流近程遥控泊车系统相比具有如下优点:
10.1、系统在近程遥控泊车系统控制系统中集成了蓝牙通信模块,直接与监控终端进通信,不需要经过peps系统即不依赖于peps系统,避免了与peps系统协同开发的问题,缩短了开发周期,同时也降低了整车厂的系统开发成本,易于实现功能安全设计,保证了系统安全性,解决了安全责任风险不易划分的问题。
11.2、系统在近程遥控泊车系统控制系统中增加了主微控制器和备用微控制器,满足了控制系统的安全性设计,同时当主控制器失效的情况下,备用控制器接管对底盘系统的控制,失效了控制系统的失效操作,提高了系统的安全性。安全性设计不用依赖于esp系统,避免了与esp系统协同开发的问题,缩短了开发周期,同时也降低了整车厂的系统开发成本,易于实现功能安全设计,保证了系统安全性,解决了安全责任风险不易划分的问题。制动系统采用现有esp和epb系统即可满足功能安全要求设计,无需重新开发,节约了整车厂的开发成本。
12.3、同当制动系统esp和epb系统接收不到控制系统周期发送的信号情况下,自行刹车将车辆刹停,降低系统安全风险。
13.4、当系统检测到转向系统也出现故障时,也采取刹停的策略。降低了转向系统失效风险,使得转向系统采用现有转向系统即可满足系统功能安全要求设计,无需重新开发,降低了整车厂的开发成本。
附图说明
14.下面对本实用新型说明书中每幅附图表达的内容及图中的标记作简要说明:
15.图1为近程遥控泊车系统原理框图;
16.图2为近程遥控泊车系统超声波雷达和摄像头安装示意图;
17.上述图中的标记均为:1、peps;2、监控终端;3、超声波雷达;4、摄像头;5、控制系统;51、主控制器;52、备用控制器;6、tcu;7、eps;8、epb;9、esp。
具体实施方式
18.下面对照附图,通过对实施例的描述,本实用新型的具体实施方式如所涉及的各构件的形状、构造、各部分之间的相互位置及连接关系、各部分的作用及工作原理、制造工艺及操作使用方法等,作进一步详细的说明,以帮助本领域技术人员对本实用新型的实用新型构思、技术方案有更完整、准确和深入的理解。
19.如图1所示,近程遥控泊车系统包括peps1、监控终端2、超声波雷达3、摄像头4、控制系统5、tcu 6(牵引控制系统)、eps7(电控助力转向系统)、epb 8(电子驻车制动系统)和esp 9(车辆稳定性控制系统)组成。
20.图2为超声波雷达3和摄像头4在整车上的布置示意图。其中,超声波雷达3包括12个超声波雷达传感器,其中前部的四个超声波雷达传感器3用于检测车辆前方障碍物以及测量车辆前方与障碍物的距离;右侧的两个超声波雷达3用于检测车辆右侧障碍物以及测量车辆右侧与障碍物的距离,同时当车辆侧方位泊车时,用于检测右侧是否有车位以及辅助找到合适的车位;后部的四个超声波雷达3用于检测车辆后方障碍物以及测量车辆后方与障碍物的距离;左侧的两个超声波雷达3用于检测车辆左侧障碍物以及测量车辆左侧与障碍物的距离,同时当车辆侧方位泊车时,用于检测左侧是否有车位以及辅助找到合适的
车位。
21.摄像头4包括4个鱼眼摄像头分部为车辆四周,用于识别车位线,寻找车位。同时辅助超声波雷达识别四周行人和障碍物,提高系统感知系统的安全性,满足功能安全要求。另外当相邻车位上没有车时用于寻找车位。除此之外,这四个摄像头还用于全景泊车辅助系统,四个摄像头通过无缝拼接形成360
°
无死角全景影像,同时泊车时可以对车辆四周局部放大,提高泊车安全性。
22.遥控泊车时,首先需要远程点火,驾驶员通过监控终端2或者车钥匙与peps1通信,通过peps1实现远程点火,点火后车辆的控制权交由近程遥控泊车控制器系统5接管,近程遥控泊车控制器系统5接收监控终端2发送的开始泊车指令,然后开始自动泊车。本技术在现有泊车辅助系统的基础上,增加满足功能安全要求的蓝牙通信模块,不需要借助于peps1,实现与近场驾驶员监控终端的实时通信,确定有人在近场监控,降低系统感知系统风险,同时也降低了对感知系统的功能安全要求;
23.系统工作时,首先通过超声波雷达3和摄像头4寻找车位,当车位两侧有车时,以超声波雷达3为主,寻找车位。当车辆两侧没有车时,以摄像头4为主,寻找车位。泊车过程中通过超声波雷达3和摄像头4识别障碍物和距离测量,实现对周围环境的感知,避免发生碰撞。
24.泊车过程中,控制系统5的主控制器51不断接收监控终端2发送的交互信息,确认泊车过程是否在人的监控下,如果连续30秒即三个接收周期接收不到交互信息或者接收到错误的交互信息,则认为近场监控失效,此时主控制器51将控制tcu模块6和esp模块9,对车辆实施减速制动,刹停车辆。备用控制器52通过spi通信接口实时和主控制器51通信,监控主控制器51的状态。当备用控制器52连续3个周期接收不到主控制器51发送的交互握手信息或者接收到错误的信息,则认为主控制器51失效,备用控制器52将接管车辆的控制权,提高了控制系统的安全性,满足了控制系统失效操作的功能安全要求。
25.主控制器51与备用控制器52之间除了采用spi通信接口进行相互监控外,还可以通过整车can总线进行监控。通过升级泊车辅助系统主控制器硬件和软件的功能安全等级,同时在增加一个备用微控制器52对主控制器51进行监控以及当主控制器失效的情况下,接管主控制器实现对车辆底盘系统的控制,提高系统的功能安全等级。
26.该系统使得由近程遥控泊车辅助系统的供应商提供满足功能安全要求的系统,不需要与peps1和esp9协作开发,只需要对peps1和esp9提出关联件的功能安全需求以及协作执行即可,降低了系统间的强耦合性,既降低了联合开发的难度,对整车厂而言,peps1和底盘执行系统只需沿用现有满足车辆的零部件即可,无需针对近程遥控泊车辅助系统重新开发,降低了开发费用。当出现安全风险的时候,因为功能相对独立,安全责任容易监控和划分。对近程遥控泊车辅助系统的零部件供应商而言,也省去了和peps1和esp9供应商协同开发的麻烦,可以有效克服现有主流系统存在的不足,也可以满足可靠性和安全性要求。
27.近程点火可以通过监控终端与peps1进行通信实现点火,点火成功后,近程遥控泊车系统控制系统通过自带的蓝牙通信模块和监控终端进行通信,确认是否有人监控泊车过程。当控制系统接收不到监控信号或者接收到错误的监控信号时,控制系统认为近场人工监控失效,并控制底盘系统实施制动,将车辆刹停。实现了监控部分的功能以及功能安全设计。
28.主控制器51通过整车can总线发送控制信息给tcu模块6和esp模块9进行纵向控
制。当esp模块9失效的情况下,epb模块8接管制动,将车辆刹停。遥控泊车过程中车辆速度较低,epb模块8完全可以将车辆刹停,而不会损坏epb模块8。相对主流的遥控泊车系统采ibooster模块实施制动,成本更低。
29.主控制器51通过整车can总线发送控制信息给eps模块7进行转向控制,当eps模块7失效的情况下,通过制动系统esp模块9或者epb模块8实施制动将车辆刹停即可。因为车速较低,从eps模块7失效开始到车辆刹停,持续时间小于500ms,车辆横向位移较小,造成的风险可控,所以现有转向系统esp模块9完全可以满足该场景下转向要求,所以转向系统esp模块9不需要满足失效操作要求,从而降低了整车成本。
30.主控制器51与备用控制器52通过整车can总线对tcu模块6、eps模块7、epb模块8、esp模块9进行实时状态监控。tcu模块6、eps模块7、epb模块8、esp模块9也通过整车can总线与主控制器51和备用控制器52进行周期性信息交互,对主控制器51和备用控制器52的状态进行监控。
31.整车can总线虽然没有冗余,但是由于制动系统由esp模块9和epb模块8冗余实现,并分别对can总线进行状态监控。当can总线失效的情况下,esp模块9优先实施制动,将车辆刹停。如果esp模块9页失效时,由epb模块8实施制动,将车辆刹停。
32.当需要控制底盘系统时,主控制器通过冗余的can总线对底盘的制动系统esp9和epb8系统,同时发出制动指令。esp9系统优先实施制动,当esp9系统失效的情况下,epb8系统实施制动,系统运行过程中,esp9和epb8系统间通过can总线通信相互监控,近程遥控泊车系统控制系统也会对esp9和epb8系统的状态进行监控。
33.上面结合附图对本实用新型进行了示例性描述,显然本实用新型具体实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本实用新型的构思和技术方案直接应用于其它场合的,均在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1