滚动时域状态估计器的制作方法
1.本发明总体上涉及一种自动驾驶和高级驾驶员辅助系统,更具体地,涉及受制于获取测量值(measurement)的通信成本的车辆状态的约束估计(constrained estimation)。
背景技术:
2.车辆的可靠状态估计是自动驾驶和高级驾驶员辅助系统(adas)的关键部分。例如,自动驾驶车辆和adas中的一个部件是运动规划器(motion planner),其获取关于周围环境的信息并且计算轨迹轮廓(trajectory profile),以(通常在存在移动障碍物的情况下)从当前位置朝向目标位置导航。作为另一示例,诸如变道系统的adas需要关于在当前时间和未来某个时间车辆相对于其它车辆所处的位置的精确信息。
3.为此,现代车辆有时采用用于估计或测量车辆的运动的各种传感器,从而实现碰撞警告或避免以及其它主动安全应用。如本文所用,传感器是一种装置、模块或子系统,其目的是检测其环境中的事件或变化,并且将信息发送到其它电子装置,通常是计算机处理器。传感器可以与其它电子装置一起使用,既可以是像灯一样简单也可以是像计算机一样复杂。
4.例如,被配置为估计车辆状态的车辆状态观测器可以采用多种不同的传感器和/或感测技术,例如近程雷达、远程雷达、具有图像处理的摄像头、激光或激光雷达、用于估计车辆状态的超声波。传感器检测主车辆的路径中的车辆和其它物体,并且控制系统使用感测到的信息来适当地采取动作。
5.在许多车辆中,传感器位于车辆内部,例如用于测量速度的速度计,或者直接集成到车辆的前保险杠或其它仪表板中的摄像头。通常,这些内部传感器通过有线通信链路(例如,通过总线)将其测量值提供给车辆状态观测器系统。然而,在一些情况下,内部传感器的测量值可能不足以以足够的精度来估计车辆和车辆周围的其它物体的状态。为此,在某些情况下,车辆状态观测器可以使用车辆外部的传感器。
6.具体而言,在车联网(iov)中,通过无线链路上的通信,外部传感器的大量测量值可用于车辆。车辆外部传的感器的示例包括其它车辆的内部传感器和道路基础设施的其它传感器,例如道路摄像头。一些现有技术的状态估计器使用内部传感器和外部传感器的可用测量值来估计车辆的状态,例如参见u.s.10/048,686。例如,卡尔曼滤波器可以用于使用所有可用测量值的状态估计。然而,该方法要求传输和处理所有数据的高成本,并且对通信带宽和计算能力的约束会限制数据量。
7.因此,需要在保持车辆状态估计的足够精度的同时降低传输外部传感器的测量值的通信成本。
技术实现要素:
8.一些实施方式的目的是提供一种系统和方法,用于使用来自内部传感器和外部传
感器的至少一些测量值以期望精度来估计车辆和/或其它周围物体的状态。附加地或备选地,一些实施方式的另一目的是提供这样一种状态估计,其能够降低在当前时间步长通过无线通信链路传送外部传感器的测量值的成本,同时保持未来时间步长的状态估计的期望精度。
9.内部传感器通过内部通信信道向状态估计器提供测量值(本文称为内部测量值),内部通信信道例如是通过导线的有线通信和通过诸如蓝牙的专用无线协议的近程无线通信。通过内部通信信道传输内部测量值的通信成本微不足道。相比之下,外部传感器通过共享通信信道向状态估计器提供测量值(本文称为外部测量值),共享通信信道例如是经由各种车辆通信标准(例如,用于将信息从车辆传递到可能影响车辆的任何实体并且反之亦然的车辆到万物(v2x)通信标准)的无线电无线信道。其它类型的车辆通信标准包括v2i(车辆到基础设施)、v2n(车辆到网络)、v2v(车辆到车辆)、v2p(车辆到行人)、v2d(车辆到装置)和v2g(车辆到电网)。就分组延迟和丢弃率而言,通过共享通信信道传输外部测量值的通信成本可能很高。
10.在本公开中,外部传感器和/或内部传感器的标记取决于状态估计器的位置,并且可以针对不同的应用而变化。例如,当状态估计器由车辆的处理器执行时,车辆的传感器是内部传感器,而其它车辆或路边辅助单元的传感器是外部传感器。相反,当状态估计器由路边辅助单元的边缘计算装置实现时,路边单元的传感器是内部传感器,而车辆的传感器(包括估计其状态的车辆的传感器)是外部传感器。
11.一些实施方式基于这样的认识,即车辆的最大可能精度是采用在当前时间步长状态估计器可用的所有内部传感器和外部传感器的测量值估计的状态精度。然而,可以不采用最大可能精度而是采用在特定情况下对于车辆来说足够的精度来确定车辆状态。例如,精度可以取决于车辆控制的目标精度。此外,一些实施方式基于这样的认识,即不同的时变情况可能要求不同的精度。换句话说,对于不同的时间步长,状态估计的期望精度可以不同。
12.在一些实施方式中,车辆和其它物体的状态估计的所需精度取决于车辆控制的所需精度,并且根据车辆离其它物体/障碍物有多远来确定。例如,如果车辆靠近物体,则需要更高的估计精度,以防止即将发生的与物体的碰撞。例如,如果车辆远离其它车辆,则车辆的控制器可以容忍较大的估计误差而不会导致任何碰撞。然而,当另一车辆靠近或者当车辆执行诸如变道或转弯的操纵时,控制器需要使用更加精确的状态估计。因此,所需精度会根据改变的环境随时间变化。
13.附加地或备选地,一些实施方式基于这样的认识,即在不同的时间步长外部传感器的不同组合可以用于状态估计器。例如,车辆可能正在经过具有不同传感器配置的不同路边辅助单元。在另一示例中,车辆可能位于除了路边辅助单元之外也可以提供外部测量值的不同种类的车辆的附近。在这些示例中,期望的状态精度可以保持恒定,而不同外部传感器的数量随着时间而变化。例如,期望的状态估计精度可以是预定的参数。附加地或备选地,不同的时变情况可能要求不同的精度和使用外部传感器的不同组合。
14.根据这种理解,一些实施方式基于这样的认识,即外部传感器的组合的灵活性可以用于降低传输外部传感器的外部测量值的通信成本。例如,可以采用内部传感器的内部测量值来确定车辆和车辆周围的其它物体的状态,而仅在需要进一步提高状态精度时请求
外部传感器的测量值。此外,在某些情况下,不需要从所有可用的外部传感器请求测量值,而只需要从实现期望精度所需的外部传感器的子集请求测量值。
15.以这种方式,在不同的时间步长,可以使用外部传感器的不同子集来最小化通信成本,同时确保满足状态估计精度的约束。然而,一些实施方式基于这样的认识,即如果针对每个时间步长单独地(即,独立于至少一些其它时间步长)执行通信成本最小化,则这样的最小化可能导致违反对状态估计精度的约束和/或在一段时间内的次优总通信成本。
16.具体而言,一些实施方式基于这样的理解,即在当前时间步长估计的状态精度和后续时间步长的状态估计的最大可能精度之间存在关系。这是因为精度的提高从一个时间步长到另一时间步长是有界的。因此,如果在不考虑未来所需的精度的情况下降低当前时间步长的状态精度,则当后续时间步长的期望精度突然增加时,即使采用外部测量值的整个集合也可能无法实现这种期望精度。当外部测量值的可用性突然下降时,也可能存在类似的问题。此外,所需精度和外部测量值的可用性的联合变化可能使得该问题更加严重。
17.为此,一些实施方式公开了一种滚动时域状态估计器,其用于基于预测时域估计车辆和周围车辆的状态。滚动时域状态估计器借用模型预测控制器(mpc)的一些原理,基于成本函数的迭代有限预测时域优化来针对每个时间步长选择外部传感器子集(成本函数描述在预测时域上获取外部测量值的总通信成本),同时满足对预测时域的每个时间步长的状态估计精度的约束。以这种方式,滚动时域状态估计器能够在选择每个时间步长的外部传感器子集时预测未来事件,以确保一致的约束满足,同时降低外部测量值的通信成本。
18.此外,同样根据一些mpc原理,在针对每个时间步长选择外部传感器子集之后,请求来自针对当前时间步长选择的外部传感器子集的外部测量值,并且使用内部传感器的内部测量值和所请求的针对当前时间步长确定的外部传感器子集的外部测量值来估计车辆状态。在当前时间步长的状态确定之后,预测时域在时间上偏移,并且重复滚动时域状态估计直至必要时为止。如本文所用,当前时间步长是期望了解其状态的步长。通常,当前时间步长是预测时域中的第一时间步长。
19.在一些应用中,滚动时域状态估计器可操作地连接到用于控制车辆的控制器。在这些应用中,每个时间步长可以与控制器的控制步长一致或对应,使得当前时间步长确定下一控制步长的车辆状态。例如,滚动时域状态估计器可以从控制车辆的移动的控制器接收对预测时域的每个时间步长的状态估计精度的约束,并且可以将当前时间步长的车辆状态提交给控制器。
20.在一些实施方式中,外部测量值的通信成本是从外部传感器传输测量值的成本。通信成本的示例包括用于传输测量值的分组大小和传输测量值的延迟。例如,激光雷达传感器的通信成本大于接近传感器的通信成本,但小于视频摄像头的通信成本。因此,一些实施方式选择外部传感器子集来满足精度要求的约束,但是降低总通信成本。如本文所用,时间步长的通信成本是在时间步长中在子集中选择的外部传感器的通信成本的总和。类似地,包括时间步长序列的预测时域上的总通信成本是所有这些时间步长的通信成本的总和。
21.例如,在一个实施方式中,每个外部传感器与通信成本相关联,并且滚动时域状态估计器对选择外部测量值的子集的优化问题进行求解,所述外部测量值的子集减少总通信成本并且受制于状态精度的约束。在一些实现方式中,求解优化问题以最小化总通信成本。
例如,在一个实施方式中,滚动时域状态估计器被配置为求解混合整数优化问题,以确定每个时间步长的外部传感器的子集。混合整数优化解算器的示例包括分支定界法。
22.在备选实施方式中,为了减少计算量,滚动时域状态估计器对优化问题进行求解,以采用最小化总通信成本的启发式近似算法来减少总通信成本,同时满足预测时域的每个时间步长的状态精度的约束。启发式近似算法的示例包括贪婪减法启发式算法、贪婪加法启发式算法和随机启发式算法。
23.一些实施方式基于这样的理解,即在使用启发式近似算法时,除了每个外部传感器的通信成本之外,了解状态估计精度对该外部传感器的测量值的依赖性是有益的。例如,对于在满足状态估计的约束的同时降低总通信成本而言,与通信成本更大但是提高状态估计精度的能力更高的外部传感器相比,通信成本更小但是提高状态估计精度的能力较低的外部传感器的作用更小。
24.为此,在一些实施方式中,滚动时域状态估计器使用外部传感器集合的效用来执行总通信成本的最小化的启发式近似算法。如本文所用,外部传感器的效用是接收外部传感器的测量值的通信成本以及车辆和其它物体的状态估计精度对外部传感器的测量值的依赖性的函数。如本文所用,车辆和其它物体的状的估计精度对外部传感器的测量值的依赖性是使用外部传感器的测量值确定的状态精度与不使用外部传感器的测量值确定的状态精度之间的差异。例如,效用可以是精度的依赖性与通信成本的比率。
25.在一些实施方式中,每个外部传感器与效用相关联,以便于选择外部传感器子集,来降低总通信成本,同时满足状态估计精度的约束。为了确保每个时间步长的约束满足,响应于未能利用对应外部传感器的整个集合的外部测量值来满足时间步长的状态估计精度的约束,启发式近似算法进行反推以扩展针对前一时间步长确定的外部传感器的子集。
26.例如,在一个实施方式中,在接收到状态精度的约束时,滚动时域状态估计器被配置为以外部传感器的效用的相反顺序从外部传感器子集迭代地移除外部传感器,直到使用外部传感器子集的测量值对车辆的状态估计精度的预测满足状态精度的约束。在备选的实施方式中,在接收到状态精度的约束时,状态观测器被配置为以外部传感器的效用的顺序将外部传感器迭代地添加到外部传感器的子集中,直到使用剩余外部传感器的测量值对车辆的状态估计精度的预测满足状态精度的约束。
27.在各种实施方式中,状态估计精度的约束针对车辆的实际状态和车辆的估计状态之间的误差设定界限。例如,在一个实施方式中,时间步长的状态估计精度的约束是预定常数。在备选实施方式中,从用于控制车辆的控制器接收时间步长的状态估计精度的约束。附加地或备选地,在一个实施方式中,滚动时域状态估计器被配置为基于到最近障碍物的距离来估计约束。例如,滚动时域状态估计器在每个时间步长确定车辆与车辆的移动的最近障碍物之间的距离,并且根据针对时间步长确定的距离来确定时间步长的状态估计精度的约束。例如,状态估计精度的约束可以是所确定距离的特定分量(fraction)。
28.因此,一个实施方式公开了一种滚动时域状态估计器,该滚动时域状态估计器用于基于预测时域估计车辆的状态,其中,在操作期间,滚动时域状态估计器连接到用于通过内部通信信道提供内部测量值的内部传感器,并且连接到用于通过共享通信信道提供外部测量值的外部传感器。滚动时域状态估计器包括:输入接口,该输入接口被配置为接受预测时域的每个时间步长可访问的外部传感器集合的配置和对预测时域的每个时间步长的状
态估计精度的约束;处理器,该处理器被配置为(1)针对预测时域的每个时间步长,选择对应时间步长可访问的对应外部传感器集合的具有足以估计车辆的状态的外部测量值的子集,所述子集满足对应时间步长的状态估计精度的约束,同时降低在预测时域上获取外部测量值的总通信成本,其中,时间步长的状态估计精度是前一时间步长的前一状态估计精度的函数;(2)从针对当前时间步长确定的外部传感器的子集请求外部测量值;以及(3)使用内部传感器的内部测量值和所请求的针对当前时间步长确定的外部传感器的子集外部测量值来估计车辆状态;以及输出接口,该输出接口被配置为输出当前时间步长的车辆的状态。
29.另一实施方式公开了一种基于预测时域估计车辆状态的方法,其中,该方法使用处理器,处理器可操作地连接到用于通过内部通信信道提供内部测量值的内部传感器,并且可操作地连接到用于通过共享通信信道提供外部测量值的外部传感器,其中,处理器与实现方法的存储的指令耦合,其中,在由处理器执行时,指令执行方法的步骤,该方法包括以下步骤:接受预测时域的每个时间步长的外部传感器集合的配置和对预测时域的每个时间步长的状态估计精度的约束;针对预测时域的每个时间步长,选择对应外部传感器集合的具有足以估计车辆的状态的外部测量值的子集,所述子集满足对应时间步长的状态估计精度的约束,同时降低在预测时域上获取外部测量值的总通信成本,其中,时间步长的状态估计精度是前一时间步长的前一状态估计精度的函数;从针对当前时间步长确定的外部传感器的子集请求外部测量值;使用内部传感器的内部测量值和所请求的针对当前时间步长确定的外部传感器的子集的外部测量值来估计车辆的状态;以及输出当前时间步长的车辆状态。
附图说明
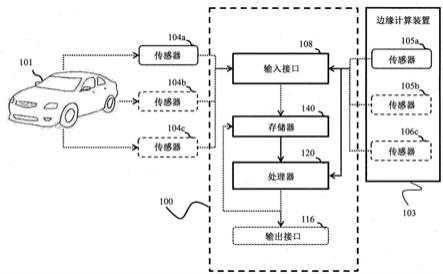
30.图1a示出了根据一些实施方式的用于基于预测时域来估计车辆的状态的滚动时域状态估计器100的框图。
31.图1b示出了根据一些实施方式的用于基于预测时域来估计车辆状态的滚动时域状态估计器100的框图。
32.图1c示出了根据一些实施方式的由滚动时域状态估计器维护的配置表的示例。
33.图2a示出了包括采用一些实施方式的原理的滚动时域状态估计器的车辆的示意图。
34.图2b示出了根据一些实施方式的图2a的控制单元的框图。
35.图3a示出了根据一个实施方式的布置在受控车辆处的滚动时域状态估计器的示例性使用的示意图。
36.图3b示出了根据一个实施方式的布置在受控车辆处的滚动时域状态估计器的示例性使用的示意图。
37.图3c示出了根据一个实施方式的布置在受控车辆处的滚动时域状态估计器的示例性使用的示意图。
38.图3d示出了根据一个实施方式的布置在受控车辆处的滚动时域状态估计器的示例性使用的示意图。
39.图3e示出了根据一个实施方式的布置在受控车辆处的滚动时域状态估计器的示
例性使用的示意图。
40.图4a示出了根据一个实施方式的布置在路边单元处的滚动时域状态估计器的示例性使用的示意图。
41.图4b示出了根据一个实施方式的布置在路边单元处的滚动时域状态估计器的示例性使用的示意图。
42.图4c示出了根据一个实施方式的布置在路边单元处的滚动时域状态估计器的示例性使用的示意图。
43.图4d示出了根据一个实施方式的布置在路边单元处的滚动时域状态估计器的示例性使用的示意图。
44.图5示出了根据一个实施方式的在不同未来时间步长上的状态估计的精度界限的示意图。
45.图6示出了根据一些实施方式的贪婪减法启发式算法的框图。
46.图7示出了根据一些实施方式的添加对应于最大效用的外部传感器直到满足状态估计精度的约束的贪婪加法启发式算法的框图。
47.图8示出了根据一些实施方式的一次添加随机选择的外部传感器直到满足状态估计精度的约束的随机启发式算法的框图。
48.图9示出了根据一些实施方式以滚动时域方式实现启发式算法的框图。
49.图10示出了一些实施方式使用的反推法的示例。
50.图11示出了图3a中追尾碰撞避免场景的模拟结果。
51.图12示出了与图11相同的模拟结果的每个时间步长的总通信成本。
52.图13示出了与图11和图12相同的模拟结果的集合包含约束的图形表示。
53.图14示出了图4a中的十字路口碰撞避免场景的模拟结果。
54.图15示出了与图13相同的模拟结果的总通信成本。
55.图16示出了与图13相同的模拟结果的总通信成本。
具体实施方式
56.系统概述
57.图1a和图1b示出了根据一些实施方式的用于基于预测时域(prediction horizon)来估计车辆101的状态的滚动时域状态估计器(receding horizon state estimator)100的框图。滚动时域状态估计器借用模型预测控制器(mpc)的一些原理,在满足对预测时域的每个时间步长的状态估计精度的约束的同时,基于成本函数的迭代有限预测时域优化来选择每个时间步长的外部传感器子集,成本函数描述在预测时域上获取外部测量值的总通信成本。以这种方式,滚动时域状态估计器能够在针对每个时间步长选择外部传感器子集时预测未来事件,以确保一致的约束满足,同时降低外部测量值的通信成本。
58.在操作期间,滚动时域状态估计器100连接到内部传感器以用于通过内部通信信道提供内部测量值,并且连接到外部传感器以用于通过共享通信信道提供外部测量值。内部通信的示例包括通过导线的有线通信和通过诸如蓝牙的专用无线协议的短程无线通信。共享通信的示例包括通过无线电无线信道的各种通信,例如使用各种车辆通信标准的通信,所述车辆通信标准例如为用于将信息从车辆传递到可能影响车辆的任何实体并且反之
亦然的车辆到万物(v2x)通信标准。其它类型的车辆通信标准包括v2i(车辆到基础设施)、v2n(车辆到网络)、v2v(车辆到车辆)、v2p(车辆到行人)、v2d(车辆到装置)和v2g(车辆到电网)。
59.在本公开中,外部和/或内部传感器的标记取决于状态估计器的位置并且能够例如基于状态估计器100的位置针对不同的应用而变化。例如,当状态估计器100由车辆101的处理器执行时,车辆的传感器(例如,传感器104a、104b和104c)是内部传感器,而其它车辆或路边辅助单元的传感器105a、105b和105c是外部传感器。相反,当状态估计器由路边辅助单元的边缘计算装置103实现时,路边单元的传感器105a、105b和105c是内部传感器,而车辆的传感器(包括估计其状态的车辆101的传感器104a、104b和104c)是外部传感器。
60.滚动时域状态估计器100被配置为使用来自内部传感器和外部传感器的至少一些测量值以期望精度估计车辆状态。附加地或备选地,滚动时域状态估计器100被配置为提供这样的状态估计,其能够降低针对当前时间步长通过无线通信链路传送外部传感器的测量值的成本,同时保持针对未来时间步长的状态估计的期望精度。
61.为此,状态估计器100可以具有将状态估计器100对接到其它系统和装置的多个输入108和输出116接口。例如,网络接口控制器150适于通过总线106将状态估计器100连接到内部传感器。此外,网络接口控制器150适于通过无线网络190将状态估计器100连接到外部传感器。通过网络190并且通过总线106,状态估计器100可以接收指示车辆101及其周围环境的状态的输入信号195。输入信号195的测量值是来自传感器104a、104b、104c、105a、105b和105c中的一个或其组合的测量值或从测量值导出的数据。状态测量值195的示例包括位置、速度和加速度测量值、取向测量值以及颜色和深度图像。
62.附加地,输入接口108被配置为接受预测时域的当前时间步长和未来时间步长的外部传感器的集合的配置、预测时域的当前时间步长和未来时间步长的内部传感器的配置以及每个时间步长的状态估计精度的约束中的一个或其组合,以及任何其它操作信息。例如,在一些实施方式中,状态估计器100内的人机接口110将状态估计器连接到键盘111和定点装置112,其中定点装置112可以包括鼠标、轨迹球、触摸板、操纵杆、指点杆、手写笔或触摸屏等。通过接口110或nic150,状态估计器100可以接收诸如状态测量值195的数据。
63.状态估计器100包括被配置为输出当前时间步长的状态估计的结果的输出接口116。如本文所用,当前时间步长是期望了解状态的步长。通常,当前时间步长是预测时域中的第一时间步长。
64.在一些应用中,滚动时域状态估计器可操作地连接170到用于控制车辆的控制器102。在这些应用中,每个时间步长可以与控制器的控制步长一致或对应,使得当前时间步长确定下一控制步长的车辆状态。例如,滚动时域状态估计器可以从控制车辆的移动的控制器接收对预测时域的每个时间步长的状态估计精度的约束,并且可以将当前时间步长的车辆状态提交给控制器。
65.例如,输出接口可以包括存储器以呈现状态估计的结果。例如,状态估计器100可以通过总线106链接到显示接口180,显示接口180适于将状态估计器100连接到显示装置185(例如,计算机监视器、摄像头、电视机、投影仪或移动装置等)。状态估计器100还可以连接到应用接口160,应用接口160适于将系统连接到不同应用和/或设备165以执行各种操作。状态估计器100还可以连接到控制接口170,控制接口170适于将系统连接到控制器102,
控制器102被配置为基于估计的状态来控制车辆101的移动。
66.状态估计器100包括被配置为执行存储的指令的处理器120,以及存储可由处理器执行的指令的存储器140。处理器120可以是单核处理器、多核处理器、计算集群或任何数量的其它配置。存储器140可以包括随机存取存储器(ram)、只读存储器(rom)、闪存存储器或任何其它合适的存储器系统。处理器120通过总线106连接到一个或更多个输入输出装置。这些指令实现了根据一些实施方式的基于预测时域来估计车辆101的状态的方法。
67.为此,状态估计器100包括传感器选择器131模块,其被配置为针对预测时域的每个时间步长选择对应外部传感器集合的子集,使得外部测量值足以估计满足对应时间步长的状态估计精度的约束的车辆状态,同时降低在预测时域上获取外部测量值的总通信成本,其中,时间步长的状态估计精度是前一时间步长的前一状态估计精度的函数。
68.以这种方式,在不同的时间步长,可以使用外部传感器的不同子集来最小化通信成本,同时确保满足状态估计精度的约束。然而,如果针对每个时间步长单独地(即,独立于至少一些其它时间步长)执行通信成本最小化,则这样的最小化可导致违反状态估计精度的约束和/或在一段时间内的次优(suboptimal)总通信成本。例如,如果在不考虑未来所需的精度的情况下降低当前时间步长的状态的精度,当后续时间步长的期望精度突然增加时,即使采用外部测量值的整个集合可能也无法实现这样的期望精度。当外部测量值的可用性突然下降时,也可能存在类似的问题。另外,外部测量值的所需精度和可用性的联合变化可能使得该问题更加严重。
69.为此,在满足预测时域的每个时间步长的状态估计精度的约束的同时,传感器选择器131通过优化成本函数来针对预测时域的每个时间步长选择外部传感器的子集,该成本函数描述了在预测时域上获取外部测量值的总通信成本。实际上,传感器选择器131在针对每个时间步长选择外部传感器子集时预测未来事件,以确保一致地满足状态精度估计的约束,同时降低外部测量值的通信成本。
70.此外,并且根据一些mpc原理,在针对每个时间步长选择外部传感器子集之后,请求来自针对当前时间步长选择的外部传感器子集的外部测量值,并且使用内部传感器的内部测量值和所请求的针对当前时间步长确定的外部传感器子集的外部测量值来估计车辆状态。在当前时间步长的状态确定之后,预测时域在时间上偏移,并且重复滚动时域状态估计直至必要时为止。为此,滚动时域状态估计器100包括外部测量值提供器133模块,其被配置为例如通过nic 150从由传感器选择器131针对当前时间步长确定的外部传感器子集请求外部测量值。滚动时域状态估计器100还包括状态观测器135模块,其被配置为使用内部传感器的内部测量值和所请求的针对当前时间步长确定的外部传感器子集的外部测量值来估计车辆状态。
71.一些实施方式基于这样的认识,即车辆的最大可能精度是采用状态估计器可用的所有内部传感器和外部传感器的测量值估计的状态精度。然而,可以不采用最大可能精度而采用在特定情况下对于车辆来说足够的精度来确定车辆状态。例如,精度可以取决于车辆控制的目标精度。此外,一些实施方式基于这样的认识,即不同的时变情况可能需要不同的精度。换句话说,对于不同的时间步长,状态估计的期望精度可以不同。
72.在一些实施方式中,车辆和其它物体的状态估计的所需精度取决于车辆控制的所需精度,并且根据车辆离物体有多远来确定。例如,如果车辆靠近物体,则需要更高的估计
精度,以防止即将发生的与物体的碰撞。例如,如果车辆远离其它车辆,则车辆的控制器可以容忍较大的估计误差而不会导致任何碰撞。然而,当另一车辆靠近或者当车辆执行诸如变道或转弯的操纵时,控制器需要使用更加精确的状态估计。因此,所需精度会根据改变的环境而随时间变化。
73.附加地或备选地,一些实施方式基于这样的认识,即外部传感器的不同组合可以在不同的时间步长可用于状态估计器。例如,车辆可能正在经过具有不同传感器配置的不同路边辅助单元。在另一示例中,车辆可能位于除了路边辅助单元之外也可以提供外部测量值的不同种类车辆的附近。在这些示例中,期望的状态精度可以保持恒定,而不同外部传感器的数量随着时间而变化。例如,期望的状态估计精度可以是预定的参数。附加地或备选地,不同的时变情况可能需要不同的精度和使用外部传感器的不同组合。
74.根据这种理解,一些实施方式基于这样的认识,即期望精度的这种灵活性和/或外部传感器组合的灵活性可以用于降低传输外部传感器的外部测量值的通信成本。例如,可以采用内部传感器的内部测量值来确定车辆和车辆周围的其它物体的状态,而仅在需要进一步提高状态精度时请求外部传感器的测量值。
75.此外,在某些情况下,不需要从所有可用的外部传感器请求测量值,而只需要从外部传感器子集请求测量值,以实现期望精度。
76.以这种方式,在不同的时间步长,外部传感器的不同子集可以用于最小化通信成本,同时确保满足状态估计精度的约束。然而,一些实施方式基于这样的认识,即如果针对每个时间步长单独地(即,独立于至少一些其它时间步长)执行通信成本最小化,则这种最小化可能导致在后续时间步长中的违反状态估计精度的约束和/或一段时间内的次优总通信成本。
77.具体而言,一些实施方式基于这样的理解,即在当前时间步长估计的状态的精度和后续时间步长的状态估计的最大可能精度之间存在关系。这是因为从一个时间步长到另一时间步长精度的提高是有界的。因此,如果在不考虑未来所需的精度的情况下降低当前时间步长的状态精度,则当后续时间步长的期望精度突然增加时,即使采用外部测量值的整个集合也可能无法实现这样的期望精度。当外部测量值的可用性突然下降时,也可能存在类似的问题。此外,外部测量值的期望精度和可用性的联合变化可能使得该问题更加严重。
78.为此,在一些实施方式中,滚动时域状态估计器100的传感器选择器131模块被配置为解决混合整数优化问题(mixed integer optimization problem),以确定预测时域的每个时间步长的外部传感器子集,从而在受到预测时域的每个时间步长的状态估计精度的约束的情况下降低预测时域上的总通信成本。这些实施方式基于这样的理解,即因为在每个时间步长对特定外部传感器的选择是二态的(binary),特定外部传感器要么被选择要么不被选择到用于状态估计的外部传感器子集,所以外部传感器选择的优化问题可以表达为混合整数优化问题。
79.图1c示出了根据一些实施方式的由滚动时域状态估计器维护的配置表10的示例。这种表格简化了每个时间步长的外部传感器的配置的更新。使用此表,可以仅向状态估计器100提供对于外部传感器的每个类型12唯一的识别号11。
80.例如,为了解决混合整数问题,每个时间步长的外部传感器的配置包括对应时间
步长的每个外部传感器的通信成本13。通信成本13足以最优地求解混合整数问题。然而,为了执行滚动时域优化,需要在预测时域的每个时间步长求解混合整数(mi)规划。状态估计器100的不同实施方式所采用的解算器(solver)(例如,使用分支定界方法的解算器)的数量。然而,这种解算器需要求解困难的组合任务,因为混合整数规划通常是np-困难。
81.为此,在一些实施方式中,滚动时域状态估计器被配置为使用总通信成本最小化的启发式近似算法(heuristic approximation)来降低总通信成本,同时满足每个时间步长的状态精度约束。最初,启发式近似算法独立地针对每个时间步长最小化通信成本。然而,为了确保约束满足,响应于不能利用对应外部传感器的整个集合的外部测量值来满足时间步长的状态估计精度的约束,启发式近似算法进行反推(back-step)以扩展针对前一时间步长确定的外部传感器子集。实际上,启发式近似算法降低了计算复杂度,同时仍然确保了约束满足。启发式近似算法的示例包括贪婪减法启发式算法(greedy subtraction heuristic)、贪婪加法启发式算法和随机启发式算法中的一个或其组合。
82.一些实施方式基于这样的理解,即在使用启发式近似算法时,除了每个外部传感器的通信成本13之外,了解状态估计精度对该外部传感器的测量值的依赖性14是有益的。例如,对于在满足状态估计约束的同时降低总通信成本而言,与通信成本更大但是提高状态估计精度的能力更高的外部传感器相比,通信成本更小但是提高精度的能力较低的外部传感器的作用更小。
83.为此,在一些实施方式中,滚动时域状态估计器使用外部传感器的集合的效用15来执行总通信成本最小化的启发式近似算法。如本文所用,外部传感器的效用是接收外部传感器的测量值的通信成本13以及车辆和其它物体的状态估计精度对外部传感器的测量值的依赖性14的函数。如本文所用,车辆和其它物体的状态估计精度对外部传感器的测量值的依赖性是使用外部传感器的测量值确定的状态精度与不使用外部传感器的测量值确定的状态精度之间的差异。例如,效用可以是精度依赖性与通信成本的比率。
84.在一些实施方式中,每个外部传感器与效用相关联,以便于选择外部传感器子集,来降低总通信成本同时满足状态估计精度的约束。为了确保每个时间步长的约束满足,响应于不能利用对应外部传感器的整个集合的外部测量值来满足时间步长的状态估计精度的约束,启发式近似算法进行反推以扩展针对前一时间步长确定的外部传感器子集。
85.例如,在一个实施方式中,在接收到状态精度约束时,滚动时域状态估计器被配置为以外部传感器的效用的相反顺序从外部传感器子集迭代地移除外部传感器,直到使用外部传感器子集的测量值对车辆的状态估计精度的预测满足状态精度约束。在备选的实施方式中,在接收到状态精度约束时,状态观测器被配置为以外部传感器的效用的顺序将外部传感器迭代地添加到外部传感器子集中,直到使用剩余外部传感器的测量值对车辆的状态估计精度的预测满足状态精度约束。
86.图2a示出了包括采用一些实施方式的原理的滚动时域状态估计器的车辆的示意图。例如,车辆201包括控制单元202,其包含控制器102和滚动时域状态估计器100。如本文所用,车辆201可以是任何类型的轮式车辆,例如客车、公共汽车或探测车。此外,车辆201可以是自动或半自动车辆。车辆201的运动的示例包括由车辆201的转向系统203控制的车辆的横向运动。转向系统203由控制器102控制。
87.车辆还可以包括发动机206,发动机206可以由控制器102或车辆201的其它部件控
制。控制器的示例有pid控制、线性二次调节器(lqr)、h2/h无限控制和模型预测控制(mpc)。作为非限制性示例,车辆201还可以包括一个或更多个传感器205来感测其当前运动量和内部状态。传感器205的示例可以包括全球定位系统(gps)、加速度计、惯性测量单元、陀螺仪、轴旋转传感器、扭矩传感器、偏转传感器、压力传感器和流量传感器。车辆还可以包括一个或更多个其它传感器204a、204b来感测周围环境。传感器204a、204b的示例可以包括测距仪、雷达、激光雷达和摄像头。传感器204a、204b和205称为内部传感器或车辆内部的传感器。车辆201的滚动时域状态估计器100经由输入接口108通过有线通信链路来接收内部传感器的测量值。
88.仍然参照图2a,车辆201配备有收发机207,其经由输入接口108通过无线通信链路实现控制单元202的通信能力。收发机207使车辆201能够接收关于周围环境的信息。车辆201使用收发机207接收车辆201外部的传感器的测量值。车辆201外部的传感器与传感器204a和204b相同,但是嵌入在车辆201外部,例如,嵌入在其它交通参与者(例如,车辆、行人、骑车人和其它路边单元)中。此外,收发机207使车辆201能够请求外部传感器的测量值。
89.图2b示出了根据一些实施方式的图2a的控制单元202的框图。控制单元202包括连接到存储器222(例如,非暂时性计算机可读介质)的硬件处理器221。在一些实现方式中,存储器222存储关于车辆的信息、用于控制车辆的程序、交通的运动模型、内部传感器的规格、从无线通信链路获得的外部传感器的规格以及车辆201和周围环境的状态估计精度的约束。
90.处理器221可以是能够执行计算的任何计算装置,并且可以包括相同或不同类型的一个或更多个物理装置。处理器221可以包括多个计算装置,例如微处理器。类似地,存储器222可以是能够存储信息的任何逻辑存储器和/或非暂时性计算机可读存储介质,并且可以包括一个或更多个相同或不同类型的物理信息存储装置。处理器221允许控制器102、约束分配器209和滚动时域状态估计器100所需的计算。控制器102估计改变车辆201的运动的控制命令224。约束分配器209根据车辆在环境223中的预测运动来计算所需的对车辆201和车辆周围的其它物体的状态估计精度的约束。
91.滚动时域状态估计器可以嵌入在路边单元中。例如,路边单元可以配备有控制单元102、感测周围环境的传感器204a、204b以及收发机207。与车辆201的控制单元相同,路边单元的控制器102产生改变路边单元附近车辆的运动的控制命令224,并且滚动时域状态估计器100选择其测量值足以满足状态估计精度的约束的外部传感器子集,并且基于来自其内部传感器的数据和由传感器选择器131确定并且通过收发机207传送的来自位于其它交通参与者中的外部传感器子集的数据来估计路边单元周围的车辆状态。
92.图3a、图3b、图3c、图3d和图3e示出了根据一个实施方式的布置在受控车辆处的滚动时域状态估计器100的示例性使用的示意图。在一个示例中,嵌入在车辆301中的控制单元202控制车辆301的运动以保持与前方车辆302的距离(δp)。滚动时域状态估计器100需要使用车辆301内部的传感器和车辆301外部的传感器来估计车辆301和前方车辆302的状态。车辆301外部的传感器是嵌入在前方车辆302上的传感器和嵌入在路边单元303上的传感器。车辆301知道嵌入在前方车辆302和路边单元303上的外部传感器的规格(例如,噪声特性)。车辆301可以请求外部传感器的测量值,并且外部传感器的测量值可以经由无线通信信道被传输到车辆301。
93.使用内部传感器和外部传感器的所有测量值,可以最精确地估计车辆301和302的状态。估计的状态在本文中称为状态估计。如果状态估计接近于实际状态,则认为状态估计精确。状态估计应当处于足够的精度界限内。然而,并不总是必须获得最精确的状态估计。
94.例如,如图3b所示,当车辆301和前方车辆302彼此远离时,可以容忍更大的精度界限304和305而不会导致任何追尾碰撞。约束分配器229计算期望的精度界限。例如,约束分配器229可以根据车辆301和302之间的距离来估计精度界限。一些实施方式基于这样的认识,即使用内部传感器的测量值和仅外部传感器子集可能足以获得期望精度界限内的状态估计。
95.在一个实施方式中,内部传感器和不同组合的外部传感器的测量值用于估计在有限的未来控制步长中的车辆状态,其中状态估计的时变精度界限形成状态估计的时变约束。例如,图3b分别示出了车辆301和前方车辆302的当前位置,以及车辆301和前方车辆302的状态估计的精度界限304和305。在当前时间t0,针对不同的控制步长1、2、
…
、n预测车辆301和前方车辆302的状态(例如,给定控制命令)。对于每个未来时间步长,选择外部传感器的组合以在不同的精度界限内估计车辆301和302的状态。
96.图3c示出了前方一个步长的车辆306和307的预测状态。随着车辆彼此越来越近,应当需要更精确的界限308和309。预测前方两个步长,图3d示出了车辆310和311的状态以及所需精度界限312和313。预测前方n个步长,图3e示出了车辆314和315的状态以及所需精度界限316和317。精度区域316和317很小,这表明状态估计应当更加精确,因为车辆314和315在未来的n个控制步长中将非常接近。如果精度界限316和317与图3b中的精度界限304和305具有相同的大小,则状态估计可能指示车辆314和315已经碰撞。本公开的一些实施方式是一种在每个未来控制步长处选择外部传感器子集,以使用内部传感器和外部传感器子集的测量值来获得满足给定时变约束的状态估计的方法。
97.图4a、图4b、图4c和图4d示出了根据一个实施方式的布置在路边单元401处的滚动时域状态估计器100的示例性使用的示意图。路边单元401中的控制单元配备有内部传感器,并且可以通过无线通信链路与嵌入在三个车辆402、403和404内部的外部传感器通信。路边单元401的控制器控制车辆402、403和404的运动,以防止在十字路口的碰撞。路边单元401的状态观测器系统基于外部传感器的组合和内部传感器的测量值来估计车辆402、403和404的状态。
98.在当前时间t0,图4b示出了车辆402、403和404的当前状态以及所需精度界限405、406和407。预测前方一个步长,图4c示出了车辆408、409和410的预测状态以及所需精度界限411、412和413。预测前方n个步长,图4c示出了车辆414、415和416的预测状态以及对应的所需精度界限417、418和419。注意,当车辆接近十字路口时,精度界限变得更严格,因为否则即使在车辆实际停留在十字路口之前,车辆的估计位置也可能同时位于十字路口内(从而报告撞车)。
99.给定精度界限是时变的,并且由其它车辆的位置和冲突区域决定。例如,在图3a-图3e的实施方式中,给定精度界限由前方车辆302与主车辆301的相对位置确定。在图4a-图4d的实施方式中,给定精度界限由车辆与十字路口的距离确定。确定每个规划时间步长的精度界限的一种方式是针对每个车辆找到一个集合,使得集合中的所有点都不在发生冲突的集合内。如图3b-图3e和图4b-图4d所示,每个车辆的这种集合可以用多面体或椭圆表示。
发生冲突的集合例如是车辆301和302之间的相对距离小于最小安全距离d
min
的集合,或者是任意两个车辆的位置同时在十字路口内的集合。
100.在本公开的各种实施方式中,考虑车辆的状态x(t)的估计的问题。状态使用m个传感器测量值的子集根据以下线性系统演变:
101.x(t+1)=ax(t)+bu(t)+w(t)
102.yi(t)=cix(t)+vi(t),i=1,...,m
103.其中,yi(t)是第i传感器的测量值,vi(t)是第i传感器上的噪声,并且w(t)是过程噪声。过程噪声w(t)和传感器噪声vi(t)是具有协方差e(w(t)w(t)t)=w和e(vi(t)vi(t)t)=vi的独立相同分布的零均值高斯变量。
104.每个测量值yi=cix+vi具有表示传输和处理数据的成本的关联成本li。内部传感器的通信成本为零,因为内部传感器的测量值是通过诸如有线通信链路的专用(例如,非共享)链路接收。通过无线通信链路接收外部传感器的测量值,因此,与外部传感器相关联的通信成本较高。通信成本的示例包括用于传输测量值的分组大小和传输测量值的延迟。对于来自位置远离系统的摄像头的高分辨率图像,成本将会较大。
105.图5示出了根据一个实施方式的在不同未来时间步长上的状态估计的精度界限的示意图。在时间t处,控制器(例如,图1a的控制器102)考虑当前状态估计509(即)产生在未来时间步长0、1、
…
、n-1上的车辆的运动,作为初始状态。实线513表示车辆的预测运动。车辆状态的估计应当在不同时间步长上处于一些界限501、502、503和504内。在每个时间步长k处,估计误差必须满足误差界限e(t+k)∈ω(t+k),其中x(t+k)是在时间t+k处的实际状态,并且是在未来时间t+k处的状态估计511。可以通过使用内部传感器的测量值和所有可用外部传感器的测量值来满足该约束。然而,一些实施方式的目标是在可能时减少外部传感器的使用。
106.为此,滚动时域状态估计器100规划在不同时间步长请求哪些外部传感器测量值。这是有利的,因为未来估计误差e(t+k)取决于当前估计误差e(t)。在时间t处,滚动时域估计器求解在时间步长0、1、
…
、n-1的有限时域上计算状态估计的优化问题。仅使用第一个或前几个估计来产生新的输入序列。在时间t+1处,滚动时域估计器求解在从当前时间t+1开始的长度为n的时域上计算状态估计的优化问题。
107.在当前时间步长t,概念化滚动时域传感器选择优化问题给出如下。
108.min
109.s.t.e
t+k|t
∈ω(t+k)
110.其中,二进制变量μ
i,t+k
∈{0,1}指示是否将在时间t+k处请求第i传感器的测量值,并且e
t+k|t
表示在当前时间步长t处预测的在时间t+k处的未来估计误差。成本函数是控制步长0、1、
…
、n-1上的总成本,包括传输和处理数据的成本。约束确保估计误差e
t+k|t
满足未来界限e
t+k|t
∈ω(t+k)。注意,需要提前规划以确保收集足够的测量值来满足可能更具限制性
的未来界限(如图5的界限502和503所示)。滚动时域估计器的实现方式仅是概念性的,因为省略了如何使用传感器数据来限制估计误差e
t+k|t
。一些实施方式描述了一种具体方法。
111.在一个实施方式中,变换状态估计精度的约束以考虑无界估计误差。作为状态估计的最常用方法之一,卡尔曼滤波器产生固有无界的高斯估计误差。因此,可以采用以下的机会约束替代硬约束e(t)∈ω(t):
112.p(e(t)∈ω(t))≥p,
ꢀꢀꢀꢀꢀꢀ
(1)
113.这种替代确保了至少概率p满足约束e(t)∈ω(t)。
114.对于由卡尔曼滤波器产生的高斯估计误差,通过以下的集合包含约束来保证机会约束p(e(t)∈ω(t))≥p
[0115][0116]
这里,p(t)=e(e(t)e(t)
t
)是估计误差e(t)的协方差,并且使用具有自由度n的χ2分布来获得α(p),所述分布是其中z1、
…
、zn为独立的高斯随机变量的的分布。例如,如果n=2,则α(0.9)=4.605,α(0.95)=5.991并且α(0.99)=9.210。由卡尔曼滤波器产生的估计误差具有零平均值e(e(t))=0。
[0117]
图5示出了集合包含约束(2)。包含具有至少为p的概率的无界估计误差的椭圆505、506、507和508包含在给定精度界限501、502、503和504内部。
[0118]
一个实施方式通过提供等效约束来检查集合包含约束(2)是否满足。如果误差集是多面体:
[0119][0120]
则集合包含约束(2)等效于线性矩阵不等式(lmi):
[0121][0122]
可以计算高效地并且容易地检查lmi(3)是否满足,因为根据schur补码,其等效于以下标量非负约束:
[0123][0124]
其中,是正定的并且为正。约束(4)是标量,并且可以仅通过检查(4)中的标量值是否对于多方误差界限ω(t+1)的所有索引为正来确定集合包含约束(2)是否满足。
[0125]
一个实施方式使用卡尔曼滤波器理论来表示滚动时域传感器选择优化问题。给定当前时间t的逆协方差
[0126]
min
[0127]
s.t.
[0128][0129][0130]
其中f(q)=a-t
qa-1-a-t
qa-1
(w-1
+a-t
qa-1
)-1
a-t
qa-1
是没有测量值的逆状态协方差的开环动力学。如果对于所有i,μ
i,t+k
=1,则约束与卡尔曼协方差更新相同。优化问题(5)的解的最小化总通信成本,同时满足规划时域的每个步长的状态估计精度的机会约束(1)。
[0131]
滚动时域传感器选择优化问题(5)中的约束和示出了时间步长t+k+1处的协方差矩阵对前一时间步长处的协方差矩阵的依赖性。协方差矩阵表示在时间步长t+k处的状态估计精度,从而表示集合包含约束(2)。因此,两个约束和指示状态估计精度在两个后续时间步长之间的依赖性。
[0132]
求解优化问题(5)的一种方式是考虑规划时域上外部传感器的所有可能组合。所有可能组合形成这样的树,其在规划步长1处具有m个分支,在规划步长2处具有m2个分支,并且在规划步长n处具有mn个分支。可以通过在每个规划步长评估树的每个分支并且在满足约束的同时选择对应于最小成本的分支来发现最优解。求解该问题的另一方式是使用可用的混合整数规划解算器。混合整数规划解算器的示例是cplex、gurobi和yalmip。
[0133]
一些实施方式提出了我们的使用懒惰和贪婪启发式算法求解滚动时域传感器选择问题(5)的近似方法。采用近似方法是因为发现滚动时域传感器选择问题(5)的最优解由于非凸度和二元决策变量的存在而在计算上要求较高。首先,将问题(5)划分成n个子问题。仅聚焦一个时间步长上的一个子问题,而非一次性在时域n上求解的问题(5)。每个子问题是指:
[0134]
min
[0135]
s.t.
[0136][0137][0138]
其中,对多方误差界限ω(t+1)的约束进行索引。也就是说,为了满足误差界限e(t+k)∈ω(t+k),我们在选择传感器之前懒惰地等待直到时间t+k。我们假设内部传感器和外部传感器的测量值足以满足问题(5)的每个阶段的问题(5)的约束。换句话说,对于所有的i,μ
i,t
=1始终是子问题(6)的可行解。该假设确保了所有后续子问题的可行性,从而使子问题(6)的解成为问题(5)的可行解。
[0139]
在一些实施方式中,提出了用于解决单级传感器选择问题(6)的不同贪婪启发式算法。对于贪婪启发式算法,将每个外部传感器的效用定义为提高状态估计精度的能力与每个外部传感器的通信成本的函数。例如,对于在满足状态估计约束的同时降低总通信成本而言,与通信成本更大但是提高状态估计精度的能力更高的外部传感器相比,通信成本更小但是提高精度的能力较低的外部传感器作用可能更小。
[0140]
将外部传感器的能力量化为对第j约束的松弛(slack):
[0141][0142]
这表示外部传感器提高状态估计精度的能力,因为根据(4),如果s
j,t
(q)≥0,则满足第j约束,即将第i传感器上的奖励度量r
i,t
(q)定义为标称约束松弛s
j,i
(q)与移除第i传感器之后的松弛之间的最大差异,也就是说,
[0143][0144]
因为当去除测量值时松弛减小,所以奖励是非负的。奖励r
i,t
(q)测量第i外部传感器的测量值的移除如何影响误差约束ω(t+1)的违反。最小的r
i,t
(q)表示移除外部传感器对松弛具有最少影响。
[0145]
在一个实施方式中,每个外部传感器的效用存储在图2a的存储器222中。将第i外部传感器的效用定义为最小奖励相对于成本的比率。
[0146][0147]
在该示例性实施方式中,考虑而非li来平衡对约束的贡献的权重和相关联的成本,因为松弛s
j,t
(q)是根据定义约束(3)的半空间的kj的平方来定义的。然而,备选的实施方式使用不同的距离度量。
[0148]
在一个实施方式中,在接收到对状态精度约束时,传感器选择器被配置为以外部传感器的效用的相反顺序迭代地从外部传感器子集移除外部传感器,直到使用外部传感器子集的测量值的状态估计精度满足状态估计精度的约束。如果r
j,t
(q)>r
i,t
(q)>0,则移除第i外部传感器比移除第j外部传感器对约束松弛具有更小的影响。如果两个外部传感器具有相同的通信成本,则优选移除第i外部传感器,因为然后更加可能在下一次迭代中能够移除另外的传感器。在备选的实施方式中,在接收到状态精度约束时,传感器选择器被配置为以外部传感器的效用的顺序迭代地在外部传感器子集中添加外部传感器,直到外部传感器子集的测量值的状态估计精度满足状态估计精度的约束。对于备选的实施方式,效用的定义稍微改变。
[0149]
图6示出了根据一些实施方式的贪婪减法启发式算法的框图。在该启发式算法中,在每次迭代中从集合i
used
中减去外部传感器,其中,i
used
是将要被请求并且进行通信的外部传感器的集合。启发式算法考虑以下输入601:状态估计精度的约束、外部传感器1、2、
…
、m的规格以及在前一步长处的状态估计精度。例如,规格涉及何种外部传感器正在进行测量,哪些与ci和噪声特性相关,哪些与vi相关。在前一步长处的状态估计精度由协方差矩阵p
t|t
表示。初始化过程602考虑使用所有可用外部传感器的测量值i
used
={1,...,m},并且具有以下后验(posterior)协方差矩阵的对应逆:
[0150][0151]
如果即使采用内部传感器和所有外部传感器的测量值也都不满足约束,则启发式算法在604中报告优化问题(6)不可行。如果使用所有测量值可以满足约束,则传感器选择过程605找到与最小效用相关联的外部传感器i。如果移除外部传感器i不违反约束,则从集合i
used
中移除外部传感器,并且从q移除对应的信息,即令i
used
=i
used
\i并且只要满足约束就执行减法。当没有在不违反约束的情况下可以从i
used
移除的外部传感器时,在607终止算法。
[0152]
通过检查松弛的符号来执行对图6的603和606中的约束是否满足的检查:
[0153][0154]
该松弛指示在移除第i外部传感器之后估计误差约束(2)是否满足。例如,如果该松弛为负,则移除第i外部传感器导致状态估计误差违反界限ω(t+1)。对于具有正松弛的传感器,可以在不违反约束的情况下移除该传感器。在一个实施方式中,提出了其它可能的启发式算法。
[0155]
图7示出了根据一些实施方式的添加对应于最大效用的外部传感器直到满足状态估计精度的约束的贪婪加法启发式算法的框图。在贪婪加法启发式算法中,将通过添加第i外部传感器来提高状态估计精度的能力量化为在添加第i外部传感器之后的松弛与标称松弛s
j,t
(q)之间的最小差异。也就是说,
[0156]
[0157]
因为添加外部传感器时松弛增加,所以提高状态估计精度的能力始终为非负。
[0158]
贪婪加法启发式算法与图6的贪婪减法启发式算法采用相同的输入601。在初始化过程701中该算法以并且开始。在启发式迭代中,在703中,将待请求的外部传感器的集合i
use
增加到i
use
∪i,并且随着添加更多具有最大值的外部传感器,协方差q的逆增加到最大值选择为是因为期望通过添加传感器而以最小的成本尽可能地增加松弛(到正值)。当在702和704中满足约束时,迭代终止。通过检查是否为正来执行对约束是否满足的检查。
[0159]
图8示出了根据一些实施方式的一次添加随机选择的外部传感器直到满足状态估计精度的约束的随机启发式算法的框图。该启发式算法的差别在于,在迭代801中将随机选择的外部传感器添加到集合i
use
中,以通过在603和606中检查是否为正来检查约束是否满足。
[0160]
图9示出了根据一些实施方式的以滚动时域方式实现启发式算法的框图。在时间步长t处,启发式算法用于求解n个子问题并且在901中获得i
use,t
、i
use,t+1
、i
use,t+2
和i
use,t+n-1
的解,并且其中,i
use,t+k
是在未来时间步长t+k处待请求的外部传感器的集合。在时间步长t,滚动时域状态估计器在902中使用内部传感器的测量值和外部传感器子集i
use,t
的测量值来估计状态。在下一时间步长t+1处,状态估计器再次使用启发式算法来求解后续的n个子问题,并且在903中获得i
′
use,t+1+k
(k=0、1、
…
、n-1)的解。状态估计器在904中使用外部传感器子集i
′
use,t+1
的测量值以及内部传感器的测量值来估计状态,并且在时间步长t+1处,再次求解后续的n个子问题。所实现的外部传感器子集904是在每个时间步长对第一子问题的解。
[0161]
在本发明的一个实施方式中,反推法用于考虑在规划时间步长的状态估计精度对前一步长的状态估计精度的依赖性。依赖性表示当在规划时域上的n个子问题在图9中的解901是i
use,t
、i
use,t+1
、i
use,t+2
以及i
use,t+n-1
时,在时间t+1处的解的改变(例如变为而非i
use,t+1
)影响下一时间步长处的解i
use,t+2
。由于在时间步长t+1处的解的改变,i
use,t+2
可能不再是满足在时间步长t+2处的子问题的约束的解。
[0162]
图10示出了一些实施方式使用的反推法的示例,其中在901中没有满足时间t+2处的子问题的约束的解。反推用于解决此问题。也就是说,应改变作为在前一时间t+1处确定的外部传感器集合的解i
use,t+1
,以使用附加传感器在时间t+1处获得更精确的状态估计,使得能够存在满足后续子问题的约束的解。因为在901中的i
use,t+1
导致在时间t+2处的后续子问题的不可行性,所以获得在1001中的时间t+1处的子问题的新解使得存在1002中的时间t_2处的子问题的可行解获得新解的一个示例是添加在贪婪减法启发式算法中减去已经减去的传感器中的最后一个外部传感器。如果利用和不存在满足在1003中的t+3处的子问题的约束的解,则反推法重新考虑在t+2处的
前一子问题,以判断t+2的解是否可以改变以使得能够存在t+3处的子问题的可行解。如果不可能,则反推法考虑t+1处的子问题,以判断是否存在时间步长t+2和t+3处的可行解。通过这种方式,n个子问题的解1007保证了在规划时域上满足滚动时域传感器选择问题(5)的约束。
[0163]
图11示出了图3a中的追尾碰撞避免场景的模拟结果,其中嵌入车辆301中的控制单元保持到前方车辆302的最小安全距离d
min
=3。图11示出了车辆301和302之间的位置差异δp的估计值以及随着时间的推移产生的精度界限。估计值δp由黑色实线1101表示,并且估计误差界限ω(t)由围绕实线1101的灰色区域1102表示。给定估计误差界限ω(t),控制车辆301使得到前方车辆302的距离(由δp表示)对于误差界限内的所有可能误差不小于d
min
。使用内部传感器的测量值和嵌入在前方车辆302和路边单元303中的所有外部传感器的测量值,卡尔曼滤波器返回围绕估计值1101的界限1103。界限1103表示δp的实际值以概率p=0.95在界限1103内的。贪婪减法启发式算法使用内部传感器的测量值和外部传感器子集的测量值来产生围绕估计值1101的界限1104。同样,界限1104表示δp的实际值以0.95的概率在界限内。注意,贪婪减法启发式算法的界限1104是卡尔曼滤波器的界限1103的超集,但处于期望界限1102内,这表示贪婪减法启发式算法的界限1104满足集合包含约束(2)。
[0164]
图12示出了针对与图11相同的模拟结果在每个时间步长的总通信。使用所有外部传感器的测量值得出最大总成本1201。因为贪婪减法启发式算法在不同时间步长使用不同的外部传感器子集,所以每个时间步长处的总通信成本1202不同,并且总是不大于成本1201。由于状态估计精度的约束1102随着车辆301前进而变得更严格,所以需要更大数量的外部传感器来获得满足约束的状态估计。因此,随着车辆301靠近前方车辆302,贪婪减法启发式算法的总通信成本1202趋于增加。
[0165]
图13示出了针对与图11和图12相同的模拟结果在时间步长1处的集合包含约束(2)的图形表示。给定估计误差界限ω(1)由被四条红线包围的矩形1301表示。在不使用任何测量值的情况下,基于先验协方差矩阵p1|0的椭圆由灰色大椭圆1302表示。椭圆1302以0.95的概率包含在获得任何测量值之前的估计值δp与实际值之间的误差。不使用任何测量值的椭圆1302违反集合包含约束(2),因为椭圆1302未被包含在误差界限1301内。使用内部传感器的测量值和所有外部传感器的测量值,卡尔曼滤波器产生最小椭圆1303。这表示以0.95的概率,误差处于最小椭圆1303内。贪婪减法启发式算法通过选择外部传感器子集产生椭圆1304。卡尔曼滤波器的椭圆1303总是包含在贪婪减法启发式算法的椭圆1304内,并且椭圆1303和1304都满足集合包含约束(2)。
[0166]
图14示出了图4a中的十字路口碰撞避免场景的模拟结果,其中,嵌入在路边单元401中的控制器控制接近车辆402、403和404以防止它们同时位于十字路口内。车辆402、403和404的位置估计值由黑色实线1402呈现。状态估计精度的期望界限由灰色区域1405表示。图14示出当车辆402、403和404接近位于20和30之间的十字路口1401时车辆402、403和404随时间推移的位置。注意,控制车辆,使得针对期望界限内的所有估计误差,车辆不会同时位于十字路口内。使用嵌入在车辆402、403和404上的所有外部传感器的测量值,卡尔曼滤
波器产生在期望精度界限1405内的由估计值周围的蓝色虚线1403表示的精度。卡尔曼滤波器以0.95的概率确保位置的实际值在精度界限1403内。使用外部传感器子集的测量值,贪婪减法启发式算法产生也在期望精度界限1405内的由红色实线1304表示的精度界限。贪婪减法启发式算法以0.95的概率确保位置的实际值处于精度界限1404内。因为贪婪减法启发式算法的精度界限1404包含在期望精度界限1405中,所以当仅使用外部传感器子集时,满足集合包含约束(2)。
[0167]
图15和图16示出了针对与图13相同的模拟结果的总通信成本。使用所有外部传感器的测量值得出最大总成本1401。因为贪婪减法启发式算法在不同时间步长使用不同的外部传感器子集,所以每个时间步长的总通信成本1502不同,并且总是不大于成本1501。由于期望精度界限1405随着车辆402、403和404靠近十字路口而变得更加严格,所以需要更大数量的外部传感器的测量值来获得满足集合包含约束(2)的状态估计。因此,随着车辆402、403和404靠近十字路口,贪婪减法启发式算法的总通信成本1502趋于增加。
[0168]
图15a、图16示出了使用1000个随机产生的模拟情况的集合的模拟结果。在每种情况下,随机产生i∈{1,2,...,8}(8个测量值)的噪声协方差vi和先验协方差矩阵对于每种,模拟情况,图15示出了子问题(6)的最佳成本1501,其通过评估外部传感器的所有可能组合而获得,以及贪婪减法1502、贪婪加法1503、随机启发式算法1504的成本。结果显示,贪婪减法启发式算法的大多数成本1502接近最佳成本1501。图16示出了启发式算法的成本与最佳成本之间的差异的直方图。贪婪减法启发式算法的成本与最佳成本之间的差异1601在88.3%的情况中为零,并且具有给出最大差异为7的分布。贪婪加法启发式算法的成本与最佳成本之间的差异1602在29.8%的情况中为零,并且具有给出最大差异为17的分布。随机启发式算法的成本与最佳成本之间的差异1603较款地分布。
[0169]
本发明的上述实施方式可以以多种方式中的任何一种实现。例如,实施方式可以使用硬件、软件或其组合实现。当以软件实现时,可以在设置在单个计算机中或分布在多个计算机中的任何合适的处理器或处理器集合上执行软件代码。这种处理器可以实现为集成电路,在集成电路部件中具有一个或多个处理器。可以使用任何合适格式的电路实现处理器。
[0170]
此外,本发明的实施方式可以实施为已经提供其示例的方法。作为方法的一部分执行的动作可以以任何合适的方式排序。因此,可以构建这样的实施方式,其中以不同于图示的顺序地执行动作(可以包括同时执行一些动作),即使这些动作在示出的实施方式中示出为顺序的动作。
[0171]
在权利要求中使用诸如“第一”、“第二”的顺序术语来修饰权利要求要素本身并不表示一个权利要求要素相对于另一个权利要求要素的任何优先级、优先次序或顺序或执行方法的动作的时间顺序,而是仅用作标签来区分具有某个名称的一个权利要求要素和具有相同名称(除了使用顺序术语之外)的另一个要素,从而区分权利要求要素。
[0172]
尽管已经通过优选实施方式的示例描述了本发明,但是应当理解在本发明的精神和范围内可以进行各种其它的修改和变型。
[0173]
因此,所附权利要求的目标是覆盖落入本发明的真实精神和范围内的所有这些修改和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1