车辆控制系统的制作方法
1.这里公开的技术涉及车辆控制系统。
背景技术:
2.在专利文献1中公开如下的技术,根据车载机器的功能而划分为多个域,按照每个域设置域控制部,利用综合控制部控制多个域控制部。在专利文献1中,例如,各机器控制部由单一或者多个ecu实现,这些ecu通过层级型的网络而连接。
3.在专利文献2中公开如下的技术,在车载网络系统中设置对不同的网络的节点之间的数据收发进行中继的网关、网络集线器(hub)。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2017-61278号公报
7.专利文献2:日本特开2017-212725号公报
8.发明要解决的技术问题
9.然而,近来,以自动驾驶系统为首,根据车内外的环境信息、驾驶员信息(以下,统称为“车内外环境信息”)等来控制车辆的车辆的自动化(包含局部自动化)相关联的技术开发得以推进。一般地,在车辆的自动化技术中,通过照相机、传感器等(以下,简称为“传感器”)取得车内外环境信息(包含驾驶员的操作信息),基于所取得的车内外环境信息进行运算处理,基于该运算结果来控制搭载于车辆的各种致动器。而且,将来,假定上述的运算处理功能和各致动器的控制功能集中于统括管理车辆整体的动作的中央运算装置。
10.另一方面,关于将各传感器、各致动器分别直接连接于如上述那样集中了功能的中央运算装置,由于信号布线庞大,因此并不现实。因此,假定像专利文献2那样,设置作为网络集线器装置、网关装置发挥功能的ecu(electronic control unit:电子控制系统),构建经由该ecu进行通信的车载网络。并且,假定主干网络由以太网(注册商标)这样的高速接口构成,另一方面,在末端部分等残留有以往的can接口。
11.这样,在将运算处理功能和各致动器的控制功能装入到中央运算装置的情况下,在希望同步地动作的致动器散布于车辆时,由于从中央运算装置向各致动器的信号路径不同,因而有可能无法取得致动器的控制振动的同步。这样,例如,有可能在多个转向灯装置中点亮时刻相互偏差、或者在多个音响装置中蜂鸣音的定时相互偏差。特别是,对于进行重复动作的致动器,由于彼此的动作定时的偏差明显,因此需要对策。
技术实现要素:
12.这里公开的技术是鉴于该点而完成的,其目的在于,在将致动器的控制功能装入到中央运算装置的情况下,也能够同步控制散布于车辆的致动器。
13.用于解决技术问题的技术手段
14.为了解决上述技术问题,在这里公开的技术中,以车辆控制系统为对象,其特征在
于,具备:多个区域ecu,该多个区域ecu按照车辆的规定的每个区域而配置;以及中央运算装置,该中央运算装置统括该多个区域ecu,所述多个区域ecu包含:第一区域ecu,该第一区域ecu基于从所述中央运算装置接受到的闪烁控制信号,输出用于使设置于所述车辆的第一方向指示灯闪烁的第一闪烁定时信号;以及第二区域ecu,该第二区域ecu基于从所述中央运算装置接受到的闪烁控制信号,输出用于使第二方向指示灯闪烁的第二闪烁定时信号,该第二方向指示灯设置于所述车辆的与所述第一方向指示灯不同的位置,所述中央运算装置与所述第一区域ecu之间、以及所述中央运算装置与第二区域ecu之间分别由时刻同步方式的网络连接,另一方面,所述第一区域ecu与所述第一方向指示灯之间、以及所述第二区域ecu与所述第二方向指示灯之间由时刻非同步方式的网络连接,所述中央运算装置向所述第一区域ecu和所述第二区域ecu发送方向指示灯的闪烁定时信号,所述第一区域ecu向所述中央运算装置发送基于所述闪烁定时信号的所述第一方向指示灯的闪烁定时信息,所述第二区域ecu向所述中央运算装置发送基于所述闪烁定时信号的所述第二方向指示灯的闪烁定时信息,所述中央运算装置构成为,向所述第一区域ecu和所述第二区域ecu发送根据所述第一方向指示灯和所述第二方向指示灯的闪烁定时信息而调整定时的调整信号。
15.另外,在这里公开的技术中,以车辆控制系统为对象,其特征在于,具备:多个区域ecu,该多个区域ecu按照车辆的规定的每个区域而配置;以及中央运算装置,该中央运算装置统括该多个区域ecu,所述多个区域ecu包含:第一区域ecu,该第一区域ecu基于从所述中央运算装置接受到的控制信号,输出用于使设置于所述车辆的第一致动器进行动作的第一定时信号;以及第二区域ecu,该第二区域ecu基于从所述中央运算装置接受到的控制信号,输出用于使第二致动器进行动作的第二定时信号,该第二致动器设置于所述车辆的与所述第一致动器不同的位置,所述中央运算装置与所述第一区域ecu之间、以及所述中央运算装置与第二区域ecu之间分别由时刻同步方式的网络连接,另一方面,所述第一区域ecu与所述第一致动器之间、以及所述第二区域ecu与所述第二致动器之间由时刻非同步方式的网络连接,所述中央运算装置向所述第一区域ecu和所述第二区域ecu发送通用的定时信号,所述第一区域ecu向所述中央运算装置发送基于所述定时信号的所述第一致动器的驱动定时信息,所述第二区域ecu向所述中央运算装置发送基于所述定时信号的所述第二致动器的驱动定时信息,所述中央运算装置构成为,向所述第一区域ecu和所述第二区域ecu发送根据所述第一致动器和所述第二致动器的驱动定时信息而调整定时的调整信号。
16.根据上述的方式,在将致动器的控制功能装入到中央运算装置的情况下,也能够同步控制散布于车辆的致动器。
17.发明的效果
18.根据这里公开的技术,在将致动器的控制功能装入到中央运算装置的情况下,也能够同步控制散布于车辆的致动器。
附图说明
19.图1是表示车载网络系统的结构例的图。
20.图2是表示第一区域ecu的功能结构例的图。
21.图3是表示第三区域ecu的功能结构例的图。
22.图4是表示第五区域ecu的功能结构例的图。
23.图5是表示实施方式1的转向灯的连接结构例的图。
24.图6是表示实施方式1的转向灯的闪烁控制例的流程图。
25.图7是表示实施方式2的转向灯的连接结构例的图。
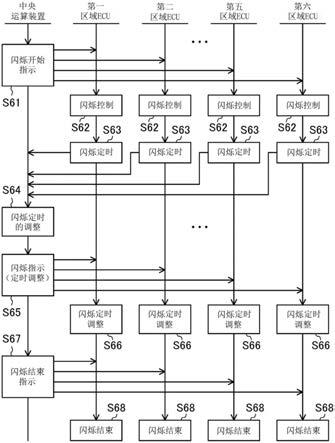
26.图8是表示实施方式2的转向灯的闪烁控制例的流程图。
27.图9是表示实施方式2的转向灯的闪烁控制例的时序图。
28.图10是表示实施方式2的转向灯的闪烁控制的其他例的流程图。
具体实施方式
29.以下,一边参照附图一边详细地说明例示的实施方式。此外,在本说明书中,将搭载于车辆的传感器、致动器等负责行驶控制的装置类称为车载设备、或者简称为设备。
30.(实施方式1)
31.图1是表示车载网络系统的结构例的图。图1的车载网络系统搭载于车辆1,具备按照车辆的规定的每个区域而配置的多个区域ecu2、以及统括多个区域ecu2的中央运算装置10。在本实施方式的车载网络系统中,表示将车辆1分为7个区域,在各区域设置有区域ecu2的例子。中央运算装置10是中央ecu的一例。此外,详细情况后述说明,各区域ecu2具有作为网络集线器装置的功能,该网络集线器装置具有对经由网络而传送的信息进行中继的功能。
32.在各以下的说明中,有时将配置于车辆1的左前部座椅附近的左仪表板区域的区域ecu2称为第一区域ecu21,将配置于车辆1的右前部座椅附近的右仪表板区域的区域ecu2称为第二区域ecu22。有时将配置于车辆1的左前侧的左前区域的区域ecu2称为第三区域ecu23,将配置于车辆1的右前侧的右前区域的区域ecu2称为第四区域ecu24。有时将配置于车辆1的左后侧的左后区域的区域ecu2称为第五区域ecu25,将配置于车辆1的右后侧的右后区域的区域ecu2称为第六区域ecu26。有时将配置于车辆1的中央操控台附近的操控台区域的区域ecu2称为第七区域ecu27。此外,在不区别各集线器装置21~27时,简称为区域ecu2。另外,在使区域的数量增减时,与之对应地,区域ecu2的个数也增减。
33.区域ecu2构成为,能够将后述的智能ecu、智能致动器、传感器、致动器等车载设备连接。此外,在本实施方式中,表示区域ecu2设置于各区域的例子,但不限于此,例如,也可以与区域无关地,设置用于将与特定的功能对应的车载设备连接的区域ecu。另外,也可以在区域内设置多个区域ecu。另外,也可以是,智能ecu兼具有作为区域ecu的功能、或者区域ecu兼具有作为智能ecu的功能。
34.在图1中,第一区域ecu21、第二区域ecu22、第三区域ecu23、第四区域ecu24具有作为在与中央运算装置10之间进行以太网(注册商标)信号的发送接收的以太网集线器装置(在图1中表述为e-ec)的功能。具体而言,中央运算装置10与第一区域ecu21之间由以太网电缆eb1连接,中央运算装置10与第二区域ecu22之间由以太网电缆eb2连接。中央运算装置10与第三区域ecu23之间由以太网电缆eb3连接,中央运算装置10与第四区域ecu24之间由以太网电缆eb4连接。另外,第三区域ecu23与第四区域ecu24之间由以太网电缆eb5连接。以太网协议具有补偿通信同步的结构(tsn:time sensitive networking:时间敏感网络)。以太网协议是时刻同步方式的网络的一例。即,在图1的例子中,中央运算装置10与第一区域
ecu21、第二区域ecu22、第三区域ecu23和第四区域ecu24由时刻同步方式的网络连接。第一~第四区域ecu21~24是本发明的第一区域ecu或者第二区域ecu的一例。此外,以太网信号是依据以太网协议的信号。同样,后述的can信号是依据can协议的信号,can-fd信号是依据can-fd协议标准的信号,lin(local interconnect network:本地互连网络)信号是依据lin协议的信号。
35.在图1中,第五区域ecu25、第六区域ecu26、第七区域ecu27具有作为在与中央运算装置10和/或其他的区域ecu2之间进行can-fd(can with flexible data-rate:灵活数据速率can)信号或者can(controllerareanetwork:控制器区域网络)信号的发送接收的can集线器装置(在图1中表述为c-ec)的功能。具体而言,第一区域ecu21与第五区域ecu25之间由can-fd电缆cb5连接,第二区域ecu22与第六区域ecu26之间由can-fd电缆cb6连接,第五区域ecu25与第六区域ecu26之间由can-fd电缆cb8连接。另外,第一区域ecu21与第七区域ecu27之间由can-fd电缆cb7连接。此外,can协议、can-fd协议和lin协议是时刻非同步方式的网络的一例。
36.在本实施方式中,将由中央运算装置10与各区域ecu2之间的信号传送路径、以及区域ecu2间的信号传送路径形成的网络称为“主干网络”。在图1中,通过以太网电缆eb1~eb5和can-fd电缆cb5~cb8构成主干网络。在图1中,用粗实线表示主干网络中的、以太网信号(依据以太网标准的信号)的传送路径,用中粗实线表示can-fd信号或者can信号的传送路径。另外,将从各区域ecu21~27到车载设备侧的信号传送路径称为“设备侧网络”。在图1中,用细实线表示从各区域ecu21~27到各车载设备的信号路径、即设备侧网络。细实线的信号路径包含模拟/数字的各信号路径、can信号路径、lin信号路径、can-fd信号路径。
37.为了能够进行车辆1的自动驾驶、辅助驾驶,中央运算装置10接受搭载于车辆1的传感器类的输出等,而计算车辆1应该行驶的路径,决定用于追随该路径的车辆1的运动。中央运算装置10例如为由一个或者多个芯片构成的处理器,有时具有ai(artificial intelligence:人工智能)功能。在图1的结构例中,中央运算装置10具备处理器和存储器。存储器储存有能够由处理器执行的软件即模块。中央运算装置10的各部的功能例如是通过由处理器执行储存于存储器的各模块而实现的。此外,处理器和存储器也可以分别有多个。
38.向中央运算装置10输出信息的传感器类例如包含:拍摄车外环境的照相机、检测车外的物标等的雷达、检测车辆的位置的gps(global positioning system:全球定位系统)传感器、检测车速、加速度、横摆率等车辆的举动的车辆状态传感器、车内照相机等取得车辆的乘员的状态的乘员状态传感器等。另外,也可以向中央运算装置10输入来自位于本车辆的周围的其他车辆的通信信息、来自导航系统的交通信息。
39.图2表示第一区域ecu21的功能结构例。
40.第一区域ecu21具备通信部120、协议转换部140、信号转换部150。协议转换部140具备can转换部141、lin转换部142。信号转换部150具备数字输入电路151、模拟输入电路152、控制输出电路153、154。
41.作为与主干网络连接的通信端口(以下,称为主干端口),在第一区域ecu21设置有供以太网电缆eb1连接的主干端口101和供can-fd电缆cb5连接的主干端口102。换言之,主干端口101和主干端口102为供在主干网络上传送的信号即主干网络信号输入输出的端口。
42.作为与设备侧网络连接的通信端口,在第一区域ecu21设置有通信端口111~118。
第一区域ecu21经由通信端口111~113进行can信号的输入输出,经由通信端口114进行lin信号的输入输出,经由通信端口115进行数字控制信号的输入,经由通信端口116进行模拟控制信号的输入,经由通信端口117、118进行模拟控制信号的输出。通信端口111例如与智能ecu161连接,在其前端与气囊装置d11连接。通信端口112例如与用于对侧车门进行上锁/开锁的智能致动器162连接。通信端口113例如与用于产生蜂鸣音等的智能致动器163连接。通信端口114例如与用于使无钥匙装置进行动作的传感器164(以下,称为无钥匙传感器164)连接。通信端口115例如与开关165(例如,离合器切断开关、制动开关等)连接。通信端口116例如与传感器166(例如,加速踏板传感器、离合器行程传感器等)连接。通信端口117例如与在车辆左侧的车门后视镜设置的左侧转向灯l1连接。通信端口118例如与致动器168(例如,附属于喇叭、无钥匙蜂鸣器、仪表装置等而设置的显示灯等)连接。此外,在附图中,为了容易理解说明,除了智能致动器162之外,还图示锁定机构的符号标记。另外,除了智能致动器163之外,还图示声源机构的符号标记。
43.此外,虽然省略具体的图示,但也可以构成为,通过针对各通信端口111~118插入设置于从车载设备延伸的电缆的前端的连接器,能够进行车载设备的安装、拆卸。另外,也可以在各通信端口111~118连接智能连接器(省略图示),在其前端安装车载设备。智能连接器sc例如内置有模拟/数字转换电路、驱动电路等,具有向作为车载设备的致动器发送驱动信号的功能、或者具有将来自作为车载设备的传感器的输入信号传递到区域ecu2的功能。
44.通信部120具备:与主干端口101连接的第一发送接收部121、与主干端口102连接的第二发送接收部122、以及网络管理部123。
45.第一发送接收部121具有经由主干端口101和以太网电缆eb1而在与中央运算装置10之间发送接收主干网络信号(以太网信号)的功能。虽然省略具体的图示,但第一发送接收部121例如具备:生成以太网信号的编码电路、将由编码电路生成的以太网信号输出到中央运算装置10的驱动电路、接收从中央运算装置10输出的以太网信号的接收器电路、以及对由接收器电路接收到的以太网信号进行解码的解码电路。
46.第二发送接收部122具有经由主干端口102和can-fd电缆cb5而在与第五区域ecu25之间发送接收主干网络信号(can-fd信号)的功能。虽然省略具体的图示,但第二发送接收部122例如具备:生成can-fd信号的编码电路、将由编码电路生成的can-fd信号输出到第五区域ecu25的驱动电路、接收从第五区域ecu25输出的can-fd信号的接收器电路、以及对由接收器电路接收到的can-fd信号进行解码的解码电路。
47.网络管理部123具备:(a)在主干网络上、即在主干端口101、102之间对主干网络信号进行中继的中继功能;(b)从主干网络信号中提取并分配与本ecu连接的设备用的信号的分配功能;以及(c)对从与本ecu连接的设备向中央运算装置10和/或其他区域ecu2传送的数据进行集中的集中功能。此外,在以下的说明(包含关于其他区域ecu2的说明)中,有时将上述的各个功能简称为“(a)中继功能”、“(b)分配功能”、“(c)集中功能”。
48.协议转换部140进行协议转换,以能够在通信方式间交换数据。具体而言,协议转换部140与网络管理部123连接,进行与上述的网络管理部123的“(a)中继功能”、“(b)分配功能”、“(c)集中功能”分别对应的协议转换。此外,在本实施方式中,协议转换还包含can与can-fd之间的数据长度转换等转换处理。
49.在“(a)中继功能”中,网络管理部123在从中央运算装置10输入的以太网信号中,提取向第五区域ecu25发送的数据(以下,称为中继数据)并输出到协议转换部140。在协议转换部140中,将中继数据转换为can协议数据,并输出到网络管理部123。在网络管理部123中,基于上述can协议数据而生成can信号。而且,第二发送接收部122经由主干端口102向第五区域ecu25输出上述can信号。同样,网络管理部123在从第五区域ecu25输入的can信号中,提取发送到中央运算装置10的数据(以下,称为中继数据)并输出到协议转换部140。协议转换部140将中继数据转换为依据以太网协议的形式的数据,并输出到网络管理部123。在网络管理部123中,基于上述的转换数据而生成以太网信号。而且,第一发送接收部121经由主干端口101向中央运算装置10输出上述以太网信号。
50.在“(b)分配功能”中,网络管理部123从由中央运算装置10输入的以太网信号中,提取与本ecu连接的设备用的数据(以下,称为本ecu用数据)。网络管理部123对于上述本ecu用数据,判断是与协议转换部140连接的设备用的数据还是与信号转换部150连接的设备用的数据,并分别分配。在协议转换部140中,若从网络管理部123接收与通信端口111~113连接的设备用的数据,则can转换部141将接收数据转换为依据can协议的信号并输出到通信端口111~113。由此,向智能ecu161、智能致动器162、163分别传递来自中央运算装置的信号(例如,控制信号)。在信号转换部150中,若从网络管理部123接收与通信端口117连接的左侧转向灯l1的控制用的数据,则控制输出电路153根据从中央运算装置10接受到的控制值,例如生成左侧转向灯l1的模拟控制信号,并输出到通信端口117。同样,在信号转换部150中,若从网络管理部123接收与通信端口118连接的致动器168的控制用的数据,则控制输出电路154根据从中央运算装置10接受到的控制值,例如生成致动器168的模拟控制信号,并输出到通信端口118。此外,在从第五区域ecu25输入的can信号中包含与本ecu连接的设备用的数据的情况下,也进行与上述的中央运算装置10的情况相同的处理。
51.在“(c)集中功能”中,例如,协议转换部140接收来自无钥匙传感器164的开锁信号(lin信号),从lin协议转换为依据以太网协议的数据,并发送到网络管理部123。另外,例如在信号转换部150中,数字输入电路151接收来自开关165的输入信号,模拟输入电路152接收来自传感器166的输入信号,分别将接收数据发送到网络管理部123。在网络管理部123中,集中来自协议转换部140的接收数据和来自信号转换部150的接收数据。在第一发送接收部121中,将由网络管理部123集中的数据作为以太网信号而经由主干端口101输出到中央运算装置10。此外,在将利用集中功能集中的数据发送到第五区域ecu25的情况下,也进行与输出到上述的中央运算装置10的情况相同的处理。
52.此外,在本实施方式中,第二区域ecu22为与第一区域ecu21通用的结构,对与各个区域ecu21、22连接的车载设备标注通用的符号。这里,省略第二区域ecu22的详细说明。但是,实际上,第一区域ecu21与第二区域ecu22也可以是完全不同的结构,也可以在各个区域ecu21、22连接相互不同的车载设备。此外,为了以后的说明的方便,对于在与第二区域ecu22连接的车辆右侧的侧后视镜设置的右侧转向灯,与和第一区域ecu21连接的左侧转向灯l1进行区别,而标注l2的符号。
53.图3表示第三区域ecu23的功能结构例。此外,这里,关于与第一区域ecu21通用的结构,有时省略说明。
54.第三区域ecu23具备通信部320、协议转换部340、信号转换部350。协议转换部340
具备can转换部341。信号转换部350具备数字输入电路351、模拟输入电路352、控制输出电路353。
55.在第三区域ecu23设置有供以太网电缆eb3连接的主干端口301、以及供以太网电缆eb5连接的主干端口302。换言之,主干端口301和主干端口302是供主干网络信号输入输出的端口。
56.作为设备用端口,在第三区域ecu23设置有通信端口311~315。第三区域ecu23经由通信端口311、312进行can信号的输入输出,经由通信端口313进行数字控制信号的输入,经由通信端口314进行模拟控制信号的输入,经由通信端口315进行模拟控制信号的输出。通信端口311例如与检测车辆1的碰撞的碰撞检测部361连接。通信端口312例如与用于使车辆左侧的左前转向灯l3进行动作的智能致动器362连接。通信端口313例如与开关363(例如,清洗级别开关、机罩开关等)连接。通信端口314例如与传感器364(例如,外气温度传感器、空气流量传感器等)连接。通信端口315例如与致动器365(例如,喇叭、无钥匙蜂鸣器等)连接。
57.通信部320具备:与主干端口301连接的第三发送接收部321、与主干端口302连接的第四发送接收部322、以及网络管理部323。此外,在通信部320中,与本技术发明相关的结构和功能与上述的第一区域ecu21的通信部120相同,这里省略其详细说明。具体而言,在如下的方面相互不同,在第一区域ecu21中第二发送接收部122依据can-fd协议,在第三区域ecu23中第四发送接收部322依据以太网协议。然而,依据各通信方式的发送接收电路的结构、延迟信息能够基于以往公知的技术来置换。
58.协议转换部340进行协议转换,以能够在通信方式间交换数据。这里,关于协议转换部340,以与上述的第一区域ecu21的协议转换部140的不同点为中心进行说明,有时省略通用的内容的说明。
59.第三区域ecu23在“(a)中继功能”中进行以太网信号-以太网信号间的中继。因此,在协议转换部340中,不需要像上述的协议转换部140那样进行中继处理的过程中的协议转换。第三区域ecu23的“(b)分配功能”和“(c)集中功能”为与上述的第一区域ecu21通用的内容,这里省略其详细说明。
60.此外,在本实施方式中,第四区域ecu24为与第三区域ecu23通用的结构,对与各个区域ecu23、24连接的车载设备标注通用的符号。这里,省略第四区域ecu24的详细说明。但是,实际上,第三区域ecu23与第四区域ecu24也可以是完全不同的结构,也可以在各个区域ecu23、24连接相互不同的车载设备。此外,为了以后的说明的方便,对于在与第四区域ecu24连接的车辆右前侧设置的右前转向灯,与和第三区域ecu23连接的左前转向灯l3进行区别,而标注l4的符号。
61.图4表示第五区域ecu25的功能结构例。此外,这里,有时省略关于与第一区域ecu21和/或第三区域ecu23通用的结构的说明。
62.第五区域ecu25具备通信部520、协议转换部540、信号转换部550。协议转换部540具备can转换部541、lin转换部542。信号转换部550具备数字输入电路551、模拟输入电路552、控制输出电路553。
63.在第五区域ecu25设置有供can-fd电缆cb5连接的主干端口501、供can-fd电缆cb8连接的主干端口502。换言之,在第五区域ecu25中,向主干端口501和主干端口502输入输出
的是can-fd信号,主干端口501与主干端口502直接连接。
64.作为设备用端口,在第五区域ecu25设置有通信端口511~516。第五区域ecu25经由通信端口511、512进行can信号的输入输出,经由通信端口513进行lin信号的输入输出,经由通信端口514进行数字控制信号的输入,经由通信端口515进行模拟控制信号的输入,经由通信端口516进行模拟控制信号的输出。通信端口511例如与用于产生蜂鸣音等的智能致动器561连接。通信端口512例如与用于锁定侧车门的智能致动器562连接。通信端口513例如与后声纳装置563连接。通信端口514例如与开关564连接。例如,通信端口515与传感器565(例如,燃料传感器、脚踏传感器等)连接。通信端口516例如与设置于车辆左后方的左后转向灯l5连接。此外,在附图中,为了容易理解说明,除了智能致动器561之外,还图示声源机构的符号标记。另外,除了智能致动器162之外,还图示锁定机构的符号标记。
65.通信部520具备:与将主干端口501和主干端口502连接的通用通信线连接的发送接收部521、以及网络管理部522。虽然省略具体的图示,但发送接收部521例如具备:生成can-fd信号的编码电路、与上述通用通信线连接的驱动电路和接收器电路、以及对由接收器电路接收到的can-fd信号进行解码的解码电路。
66.协议转换部540进行协议转换,以能够在通信方式间交换数据。这里,关于协议转换部540,以与上述的第一区域ecu21的协议转换部140的不同点为中心进行说明,有时省略通用的内容的说明。
67.在第五区域ecu25中,由于将主干端口501和主干端口502直接连接,因此不存在“(a)中继功能”这样的概念。第五区域ecu25的“(b)分配功能”和“(c)集中功能”为与上述的第一区域ecu21通用的内容,这里省略其详细说明。
68.此外,在本实施方式中,第六区域ecu26为与第五区域ecu25通用的结构,对与各个区域ecu25、26连接的车载设备标注通用的符号。这里,省略第六区域ecu26的详细说明。但是,实际上,第五区域ecu25与第六区域ecu26也可以是完全不同的结构,也可以在各个区域ecu25、26连接相互不同的车载设备。此外,为了以后的说明的方便,对于在与第六区域ecu26连接的车辆右后侧设置的右后转向灯,与和第五区域ecu25连接的左后转向灯l5进行区别,而标注l6的符号。
69.<转向灯的闪烁控制>
[0070]-概要-[0071]
像上述的“发明要解决的技术问题”所记载的那样,假定将来将运算处理功能和各致动器的控制功能集中于统括管理车辆整体的动作的中央运算装置。这意味着,当前,在按照车辆的每个区域设置的ecu、像专利文献1那样按照每个功能设置的ecu(以下,统称为“以往型的ecu”)中搭载的运算功能、控制功能被装入中央运算装置。
[0072]
如上所述,关于将各传感器、各致动器分别直接连接于集中了功能的中央运算装置,由于信号布线变得庞大,因此并不现实,因此假定构建车载网络。这样,在中央运算装置与车载设备、控制车载设备的ecu之间,存在网络集线器装置、网关装置等中继装置。
[0073]
另外,在将功能集中于中央运算装置的情况下,需要实现高速且大容量的数据传送,因此,需要应用高速接口技术。另一方面,关于在包含区域ecu和车载设备之间等在内的网络整体中应用高速接口技术,在设计成本、设计效率的方面存在缺点。因此,假定使用高速接口技术的网络与使用了以往使用的can协议、lin协议的网络混合存在。这样,有时以以
太网为代表的时刻同步方式的网络与以can、can-fd为代表的时刻非同步方式的网络混合存在。另外,在中央运算装置与车载设备之间存在的网络集线器装置、网关装置等中继装置的结构有时不同。这样,如上所述,有可能在多个转向灯中点亮时刻相互偏差、或者在多个声音产生装置中蜂鸣音的定时相互偏差。
[0074]
因此,在本技术发明中,例如,若以转向灯进行说明,特征点在于,中央运算装置10在向各区域ecu2发送闪烁控制信号之后,各区域ecu2发送闪烁定时信息,基于该闪烁定时信息进行定时的再调整。
[0075]
以下,具体参照附图进行说明。
[0076]
图5是在图1中,提取并图示从中央运算装置10到各转向灯l1~l6的网络结构。如图5所示,各转向灯l1~l6从中央运算装置10以菊花链状连接。另外,如图5所示,在中央运算装置10设置有转向灯控制部11,该转向灯控制部输出表示转向灯的闪烁开始、闪烁结束和/或闪烁定时的闪烁控制信号。
[0077]
此外,在以下的说明中,在不区别转向灯l1~l6而进行说明的情况下、在将转向灯l1~l6一起进行说明的情况下等,有时简称为转向灯l。转向灯l1~l6是第一方向指示灯或者第二方向指示灯的一例。
[0078]
如上所述,中央运算装置与第一~第四区域ecu21~24之间由时刻同步方式的以太网网络连接。即,若从转向灯控制部11向第一~第四区域ecu21~24发送闪烁控制信号,则从第一~第四区域ecu21~24输出实质上同步的闪烁控制信号。另一方面,第一区域ecu21与左侧转向灯l1之间、第二区域ecu22与右侧转向灯l2之间、第三区域ecu23与左前转向灯l3之间、第四区域ecu24与右前转向灯l4之间、第一区域ecu24与第五区域ecu24之间、第五区域ecu24与左后转向灯l5之间、第二区域ecu22与第六区域ecu26之间、以及第六区域ecu26与右后转向灯l6之间由时刻非同步方式的can-fd网络或者can网络连接。而且,如图5所示,从第一~第四区域ecu21~24到各转向灯l1~l6为止的各通信路径的各自的通信路径长度、介于其间的设备(包含ecu)相互不同。因此,即使从第一~第四区域ecu21~24输出实质上同步的闪烁控制信号,也存在各转向灯l1~l6的闪烁定时相互不同的情况。
[0079]
因此,在本实施方式中,按照图6所示的流程进行各转向灯l1~l6的闪烁控制。
[0080]
具体而言,在图6的步骤s61中,中央运算装置10向各区域ecu21~26发送作为闪烁控制信号的闪烁开始指示。
[0081]
在步骤s62中,各区域ecu2若从中央运算装置10接收闪烁开始指示,则执行与本ecu连接的转向灯l1~l6的闪烁控制。具体而言,第一区域ecu21向左侧转向灯l1输出闪烁控制信号,第二区域ecu22向右侧转向灯l2输出闪烁控制信号,第三区域ecu23向智能致动器362输出左前转向灯l3用的闪烁控制信号,第四区域ecu24向智能致动器362输出右前转向灯l4用的闪烁控制信号,第五区域ecu25向左后转向灯l5输出闪烁控制信号,第六区域ecu26向右后转向灯l6输出闪烁控制信号。在该例中,左侧转向灯l1是第一方向指示灯的一例,右侧转向灯l2是第二方向指示灯的一例。而且,从中央运算装置10向第一区域ecu21发送的左侧转向灯l1的闪烁控制信号是第一闪烁定时信号的一例。另外,从中央运算装置10向第二区域ecu22发送的右侧转向灯l2的闪烁控制信号是第二闪烁定时信号的一例。关于第三区域ecu23和第四区域ecu26也同样,分别作为第一区域ecu21或者第二区域ecu发挥功能。
[0093]
图8表示实施方式2所示的车辆控制系统中的转向灯的闪烁控制动作的一例。此外,在图8中,对于与图6通用的动作,标注通用的符号,有时省略其说明。
[0094]
在图8的步骤s61中,与图6的情况同样,中央运算装置10向各区域ecu2发送作为闪烁控制信号的闪烁开始指示。在步骤s62中,各区域ecu2若从中央运算装置10接收闪烁开始指示,则执行与本ecu连接的转向灯l1~l6的闪烁控制。
[0095]
在下一步骤s73中,各区域ecu2进行如下的闪烁定时信息的共享处理,相互共享由本ecu2控制的转向灯l的闪烁定时信息。在该共享处理中,也可以不经由中央运算装置10而共享相互的闪烁定时信息,也可以使中央运算装置10作为集线器装置存在而共享相互的闪烁定时信息。
[0096]
在下一步骤s74中,各区域ecu2执行如下的调整处理,比较其他区域ecu2的转向灯l的闪烁定时与本ecu的转向灯l的闪烁定时,并对本ecu的转向灯l的闪烁定时进行调整。闪烁定时的调整方法只要能够相互调整闪烁定时即可,具体的方法没有特别限定。
[0097]
图9表示闪烁定时的调整方法的一例。在图9的例子中,左侧转向灯l1与右侧转向灯l2的闪烁定时大致相同,并且闪烁开始时间最早。接下来,左前转向灯l3与右前转向灯l4的闪烁大致同时开始,最后,左后转向灯l5与右后转向灯l6的闪烁大致同时开始。
[0098]
在图9中,在“定时调整”的期间进行步骤s74的处理。具体而言,各区域ecu2比较其他区域ecu2的转向灯l的闪烁定时与本ecu2的转向灯l的闪烁定时,进行控制使得与最早的定时的闪烁定时一致地将熄灭时间提前。由此,能够使各转向灯l间的熄灭时间一致。并且,转向灯l的点亮/熄灭的间距能够预先设定。因此,各区域ecu2也可以在将熄灭时间提前的情况下,以该熄灭时间为起点,以规定的间距反复进行转向灯l的点亮/熄灭。由此,能够使各转向灯l间的点亮/熄灭的时间、即闪烁定时一致。
[0099]
然后,在步骤s67中,若从中央运算装置10向各区域ecu2发送作为闪烁控制信号的闪烁结束指示,则各区域ecu2结束转向灯的闪烁(步骤s68)。
[0100]
此外,在上述的说明中,“定时调整”是进行控制,以使得与最早的定时的闪烁定时一致地将熄灭时间提前,但不限于此。例如,在相对于成为基准的定时最远的定时输出了闪烁控制信号的区域ecu或者智能致动器也可以使其输出定时与成为基准的定时一致。成为基准的定时也可以预先设定,例如也可以如从各区域ecu接收到的定时信息的平均值那样通过运算来求出。
[0101]-转向灯的闪烁控制(2)-[0102]
图10表示实施方式2所示的车辆控制系统中的转向灯的闪烁控制动作的其他例。此外,在图10中,对于与图8通用的动作,标注通用的符号,有时省略其详细说明。
[0103]
在图10中,转向灯l的闪烁定时的调整方法与图8的闪烁控制动作的情况不同。具体而言,在图10的例子中,作为在闪烁控制时进行的闪烁定时的共享处理,将各区域ecu2的闪烁定时集中于第一~第六区域ecu21~26中的任意一个区域ecu2即主ecu(在图10中为第一区域ecu21)(步骤s83)。而且,在步骤s84中,主ecu基于各区域ecu2的定时信息,而进行用于各转向灯l的闪烁定时的调整的运算处理。然后,在步骤s84中,主ecu基于运算处理的结果,而向各区域ecu2发送各转向灯l的定时调整用的调整信号。
[0104]
在步骤s86中,在各区域ecu2中,基于从主ecu接收到的定时调整信号,而向转向灯输出进行了闪烁定时的调整的闪烁控制信号。
[0105]
然后,在步骤s67中,若从中央运算装置10向各区域ecu2发送作为闪烁控制信号的闪烁结束指示,则各区域ecu2结束转向灯的闪烁(步骤s68)。
[0106]
像以上那样,在本实施方式中,对于各转向灯l1~l6,闪烁控制动作本身被装入到中央运算装置10,并且对于细微的定时调整,在区域ecu侧应对。由此,能够将主要的功能装入到中央运算装置10,并且在中央运算装置与区域ecu2之间实现功能分配。
[0107]
此外,在上述的实施方式1、2中,对转向灯的控制进行了说明,但本发明的技术也可以应用于转向灯l以外的致动器的同步控制。例如,在产生蜂鸣音等的声音产生装置散布于车辆1的情况下,对于驱动该声音产生装置的智能致动器(例如,参照图1的163、561),能够采用与上述的转向灯相同的控制。在该情况下,在图1中,与第一区域ecu21连接的智能致动器163是第一致动器的一例,与第二区域ecu22连接的智能致动器163是第二致动器的一例。而且,中央运算装置10向第一区域ecu21和第二区域ecu22发送通用的定时信号。然后,第一区域ecu21向中央运算装置10发送基于接收到的定时信号的智能致动器163的驱动定时信息。同样,第二区域ecu22向中央运算装置10发送基于接收到的定时信号的智能致动器163的驱动定时信息。而且,中央运算装置10向第一区域ecu21和第二区域ecu22发送根据接收到的驱动定时信息来调整定时的调整信号。
[0108]
此外,这里公开的技术不限于上述的实施方式,在不脱离权利要求的主旨的范围内能够进行各种变更、代用。另外,上述的实施方式仅仅是例示,并没有限定地解释本发明的范围。本发明的范围由权利要求定义,属于权利要求的均等范围的变形、变更全部处于本发明的范围内。
[0109]
产业上的可利用性
[0110]
这里公开的技术可用于设计车辆控制系统。
[0111]
符号的说明
[0112]
2 区域ecu
[0113]
10 中央运算装置
[0114]
21 第一区域ecu(第一区域ecu、第二区域ecu)
[0115]
22 第二区域ecu(第一区域ecu、第二区域ecu)
[0116]
23 第三区域ecu(第一区域ecu、第二区域ecu)
[0117]
24 第四区域ecu(第一区域ecu、第二区域ecu)
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1