混合动力车辆的制作方法
1.本主题涉及车辆。更具体地,涉及混合动力车辆。
背景技术:
2.在过去几年中,随着新动力总成技术的引入,人们对减少车辆排放的污染物给予了极大的关注。为此,混合动力电动车辆(hev)的开发也受到了极大的关注,因为电动车辆的续航里程非常有限,与电动车辆(ev)相比,混合动力车辆(hev)具有最佳的性能和耐久性。此外,性能和耐久性是吸引客户购买车辆的重要因素。
3.本背景部分披露的上述信息仅用于加深对本披露背景的理解,因此可能包含不构成本国本领域普通技术人员已知的现有技术的信息。
附图说明
4.参照混合动力车辆的示例性实施例以及附图描述本发明。在所有附图中使用相同的附图标记指代类似的特征和部件。此外,本发明的发明特征在所附的权利要求中阐述。然而,当结合附图阅读时,本发明本身以及优选的使用模式、其进一步的目的和优点将通过参考示例性实施例的以下详细描述来最好地理解,其中:
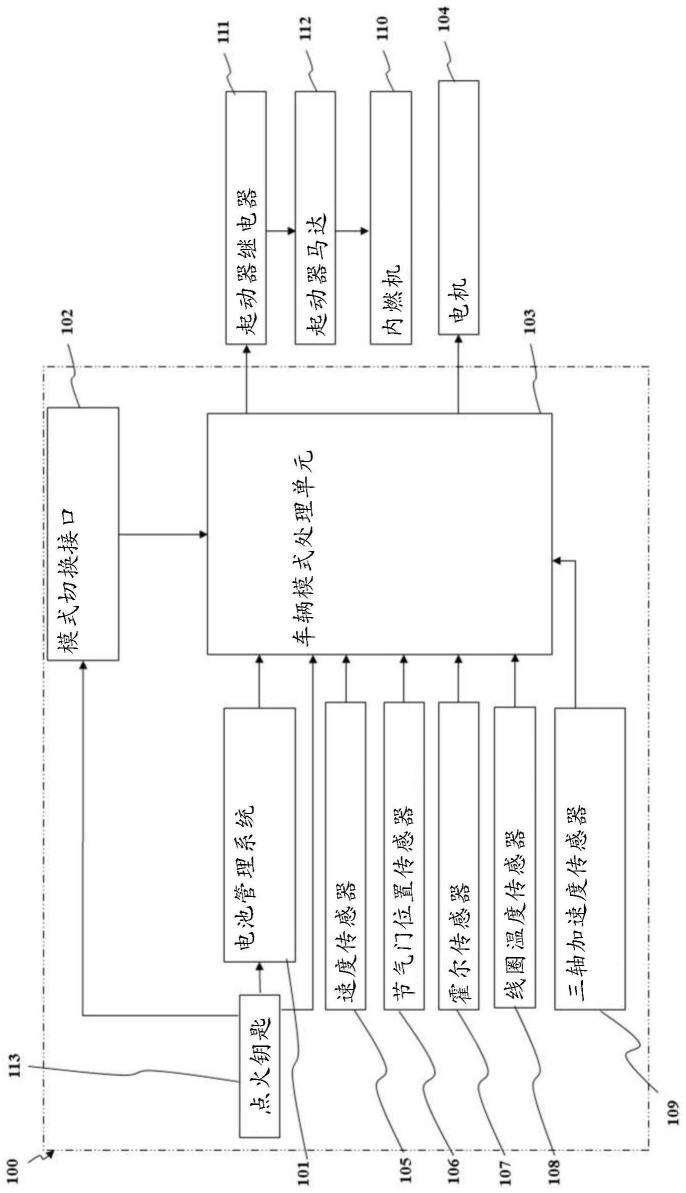
5.图1示出了根据本主题的一个示例的根据一个实施例的用于混合动力车辆(未示出)的驱动模式接合控制系统(100)的示意图。
6.图2示出了根据本主题的一个示例的根据替代实施例的用于混合动力车辆(未示出)的驱动模式接合控制系统(100)的示意图。
7.图3示出了根据本主题的一个示例的根据一个实施例的混合动力车辆中电源模式转换时消除颠簸的方法的流程图。
具体实施方式
8.这里,本主题的各种特征和实施例将从以下对其的进一步描述中可看出。
9.一般来说,混合动力车辆将传统车辆和电动车辆的优点结合在一辆车中。它由内燃(ic)发动机和牵引电机形式的双动力总成组成,根据用户需求(即需要更大功率或更高的燃料效率)共同或单独接合。牵引电机由可充电电力单元供电。
10.典型地,混合动力车辆包括一个或多个驱动模式。驱动模式包括纯电动模式、动力混合模式、经济模式和纯发动机模式。纯电动模式是一种仅在牵引电机的驱动力发生运动的模式。动力混合模式是一种在来自ic发动机和牵引电机的驱动力发生运动的模式。也就是说,动力混合模式就是牵引电机辅助行驶模式。此外,纯发动机是一种仅通过由内燃机提供的驱动力发生运动的模式。经济模式是一种模式,其中牵引电机提供驱动力直到预定车速,并且此后在预定速度以上由ic发动机提供驱动力。经济模式通过优先使用牵引电机作为驱动源来优先考虑燃料效率。
11.在上述混合动力车辆中,动力源的转换基于驾驶要求或以控制器基于用户通过模
式转换开关等的输入的致动的形式发生。然而,在电源模式转换期间,用户会体验到突然颠簸,这会严重影响用户的舒适度。这是由于动力源(即内燃机和牵引电机)的容量不同造成的。对于驾驶技术不佳的用户来说,尤其是对于两轮车辆的平衡和控制,意想不到的突然颠簸可能成为安全问题。更具体地说,在自动切换驱动模式(其中模式可由控制器更改)期间,不期望的颠簸和失控的可能性会导致潜在的不安全情况。
12.为了解决上述问题,采用了各种控制策略来降低电源的模式转换期间的颠簸。尤其是,在四轮车辆中,这是由精确控制离合器接合和分离来实现的。然而,这在配置为具有离心离合器或者自动离合器的两轮鞍式车辆中成为一个挑战。离心离合器基于发动机每分钟转速(rpm)自动接合和分离,并且由于其对布局包装、车辆重量、质量分布以及成本的不利影响,因此不希望采用用于紧凑型鞍式车辆的控制系统。
13.因此,需要一种用于包括双动力源的混合动力车辆的有效且紧凑的驱动模式接合控制系统和相关联的方法,其克服所有上述问题和已知技术的其他问题。
14.为此,本发明的一个目的是提供一种驱动模式接合控制系统和相关联的方法,以在不损害车辆性能的情况下实现无缝模式转换。
15.根据本主题,为了达到上述目的,本发明的第一特征是一种驱动模式接合控制系统,用于包括两个或更多个驱动源的混合动力车辆,所述系统包括:电池管理系统,其基于点火钥匙的致动来激活所述控制系统;以及一个或多个车辆模式处理器单元。所述车辆模式处理器单元配置为通过模式更改接口或者基于一个或多个车辆运行状态处理从用户接收的模式更改请求。车辆模式处理单元配置为基于来自多个传感器的一个或多个输入来检测混合动力车辆的实时运行状态参数值,并与混合动力车辆的预定运行状态参数值进行比较以生成输出指令。
16.除了第一特征以外,本发明的第二特征是一种驱动模式接合控制系统,其基于所述输出指令并且所述输出指令包含以下至少一个指令:在一个或多个电机上施加预定制动转矩;以及在集成起动器发电机(isg)上施加预定制动转矩;以及在集成起动器发电机(isg)和一个或多个电机上施加预定制动转矩。
17.除了第一特征以外,本发明的第三特征是一种驱动模式接合控制系统,其中,多个传感器包括:一个或多个速度传感器,所述速度传感器配置为提供车速;节气门位置传感器,所述节气门位置传感器配置为提供节气门阀的开度(amount of opening);一个或多个霍尔传感器,所述霍尔传感器配置为检测电机转速(electric machine rpm);一个或多个线圈温度传感器,所述线圈温度传感器配置为检测所述电机的热状态;以及一个或多个三轴加速度传感器,所述三轴加速度传感器配置为检测梯度值。
18.根据本主题,为了实现上述目标,本发明的第四特征是一种在包括两个或更多个电源的混合动力车辆中消除模式转换期间的颠簸的方法,所述方法包括如下步骤:由一个或多个模式处理单元接收模式转换输入;从多个传感器接收实时运行状态参数值;由一个或多个所述模式处理单元将混合动力车辆的所述实时运行状态参数值与混合动力车辆的预定运行状态参数值进行比较;作为第一事件,确定混合动力车辆的所述实时运行状态参数值是否小于混合动力车辆的所述预定运行状态参数值,并基于所述第一事件保持当前驱动模式;以及作为第二事件,还确定混合动力车辆的所述实时运行状态参数值是否大于混合车辆的所述预定运行状态参数,其中基于所述第二事件,将驱动模式从当前模式更改为
与所述当前驱动模式不同的用户请求模式。
19.除了第四特征以外,本发明的第五特征是一种在混合动力车辆的模式转换期间消除颠簸的方法,其中,所述第二事件包括:由一个或多个所述车辆模式处理单元从一个或多个三轴加速度传感器接收输入以检测梯度值;将所述检测到的梯度值与预定梯度值进行比较;如果检测到的梯度值大于预定梯度值,则将模式更改为用户请求模式。
20.除了第四特征以外,本发明的第六特征是一种在混合动力车辆的模式转换期间消除颠簸的方法,其中,如果梯度值小于预定值,则第二事件还包括由所述车辆模式处理单元确定并输出相应的交替信号。
21.除了第四和第六特征以外,本发明的第七特征是一种在混合动力车辆的模式转换期间消除颠簸的方法,其中,所述确定和输出相应的交替信号包含;检测电机运行状态参数值和发动机运行状态参数值;计算所述电机运行状态参数与发动机运行状态参数值之间的差值;由所述车辆模式处理单元基于所述电机运行状态参数值与发动机运行状态参数值之间的计算出的差值来确定所需的相应制动转矩;以及生成与确定的制动转矩相应的输出指令电信号。
22.除了第四和第七特征以外,本发明的第八特征是一种在混合动力车辆的模式转换期间消除颠簸的方法,其中,所述相应的输出指令包括在一个或多个电机和/或isg上施加所需的相应的制动转矩,以确保平稳过渡并同时将模式更改为用户请求模式。
23.除了第四和第八特征以外,本发明的第九特征是一种在混合动力车辆的模式转换期间消除颠簸的方法,其中,由于在模式转换期间施加制动转矩而产生的可回收电能通过专用再生电路存储在电池中。
24.除了第四特征以外,本发明的第十特征是一种在混合动力车辆的模式转换期间消除颠簸的方法,其中,所述车辆运行状态参数值包含预定车速范围和节气门阀的开度。
25.除了第四和第十特征以外,本发明的第十一特征是一种在混合动力车辆的模式转换期间消除颠簸的方法,其中,所述预定车速范围为每小时15至60公里并且节气门阀的开度为30%或以上。
26.除了第四和第七特征以外,本发明的第十二特征是一种在混合动力车辆的模式转换期间消除颠簸的方法,其中,所述发动机运行状态参数值包含估计的发动机转矩,其中所述估计的发动机转矩是基于发动机转速、点火正时、歧管进气压力、进气温度、节气门阀的开度和空燃比等计算的。
27.除了第四和第七特征以外,本发明的第十三特征是一种在混合动力车辆的模式转换期间消除颠簸的方法,其中,所述电机状态参数值包含估计的电机转矩,其中所述估计的电机转矩是基于相电流、电机转速、电机的热状态参数等计算的。
28.除了第一至第十三特征以外,本发明的第十四特征是一种在混合动力车辆的模式转换期间消除颠簸的方法,其中,所述混合动力车辆包含两轮鞍式车辆,所述车辆配置为具有驱动模式接合控制系统和在模式转换期间消除颠簸的相关联的方法。
29.参考附图进一步描述本主题。应当注意,描述和附图仅仅说明了本主题的原理。可以设计出各种布置,尽管未在此中明确描述或示出,但包含本主题的原理。此外,在此所有陈述的原则、方面和本主题的示例,以及其具体示例,旨在涵盖其等同物。
30.前述公开不旨在将本公开限制于所公开的精确形式或特定使用领域。因此,考虑
到本公开的各种替代实施例和/或修改,无论是在此明确描述还是暗示,根据本公开是可能的。已经如此描述了本公开的实施例,本领域的普通技术人员将认识到可以在不脱离本公开的范围的情况下在形式和细节上做出改变。因此,本公开仅受权利要求的限制。
31.在前述说明书中,已经结合具体实施例描述了本公开。然而,如本领域技术人员将理解的,在不脱离本公开的精神和范围的情况下,可以修改或以各种其他方式实施在此公开的各种实施例。因此,该描述被认为是说明性的,并且是为了教导本领域技术人员制作和使用本公开的各种实施例的方式。应当理解的是,在此所示和公开的形式将被视为代表性实施例。等效的元件、材料、工艺或步骤可以替代本文中代表性说明和描述的那些。此外,本公开的某些特征可以独立于其他特征的使用而被利用,所有这些对于本领域技术人员在受益于本公开的描述之后将是显而易见的。诸如“包括”、“包含”、“合并”、“由
……
组成”、“具有”、“是”等用于描述和主张本公开的表达旨在以非排他性的方式解释,即允许未明确描述的项目、部件或元素也存在。提及单数也应理解为与复数相关。
32.此外,在此所公开的各种实施例仅具有说明性和解释性意义,不应以任何方式解释为对本公开的限制。所有的连接引用(例如,附接、附接、耦合、连接等)只是用来帮助读者理解本公开的内容,而不可能生成限制,特别是关于本公开的系统和/或方法的位置、定向或使用。因此,连接引用,如果有的话,应该被广义地解释。此外,这种连接引用并不一定意味着两个元素直接相互关联。
33.此外,所有数字术语,例如但不限于“第一”、“第二”、“第三”、“主要”、“次要”、“主”或任何其他普通和/或数字术语,也应仅作为标识符,以帮助读者理解本公开的各种元素、实施例、变型和/或修改,并且不会造成任何限制,特别是关于相对于或超过另一元素、实施例、变型和/或修改的任何元素、实施方案、变型和或修改的顺序或偏好。
34.还应理解,附图/图中描绘的一个或多个元件也可以以更分离或集成的方式实现,或者甚至在某些情况下被移除或呈现为不可操作,这在根据特定应用是有用的。此外,图/附图中的任何信号影线(signal hatches)仅应视为示例性的,而不是限制性的,除非另有规定。
35.现在将参考附图详细描述本发明的实施例。
36.图1示出了根据本主题的一个示例的根据一个实施例的用于混合动力车辆(未示出)的驱动模式接合控制系统(100)的示意图。混合动力车辆(未示出)的驱动系统(未示出)包括内燃(ic)发动机(100)和一个或多个电机(104)。内燃机(110)为四冲程内燃机,并且为混合动力车辆(未示出)的驱动源之一。在内燃机(110)中,发动机启动和停止控制等是根据一个或多个车辆模式处理单元(103)的输出指令进行的。根据优选的实施例,车辆模式处理单元(103)可以是混合动力控制单元(hcu)。此外,基于来自车辆模式处理单元(103)的输出指令控制一个或多个电机(104)。根据优选的实施例,一个或多个电机(104)包含牵引电机,其通过电池管理系统(bms)(101)由高瓦电池(未示出)供电。更具体地,车辆模式处理单元(103)、bms(101)、模式切换接口(102)、多个传感器、一个或多个电机(104)和内燃机(110)通过混合动力车辆(未示出)的控制器局域网(can)总线彼此通信。多个传感器包含节气门位置传感器(106)、一个或多个霍尔传感器(107)、用于检测电机的热状态的一个或多个线圈温度传感器(108)以及用于感测车辆状态参数值的一个或多个三轴加速度传感器(109)。节气门阀(未示出)的开度由节气门位置传感器(106)检测。霍尔传感器(107)配置为检测每
分钟电机转速(r.p.m)。根据本发明的实施例,霍尔传感器有三个。此外,三轴加速度传感器检测梯度值。
37.在运行过程中,当骑乘者打开点火钥匙(113)时,bms(101)为驱动模式接合控制系统(100)供电。在打开点火钥匙(113)之后,混合动力车辆(未示出)立即进入怠速模式达预定时间。在怠速模式期间,混合动力车辆(未示出)保持在不移动状态。此外,基于来自用户的乘坐模式输入,车辆模式处理单元(103)向一个或多个电源(110,104)生成输出指令。根据本发明的优选的实施例,当没有从用户接收到输入时,混合动力车辆(未示出)自动地从怠速模式切换到默认模式。默认模式包含经济模式。在经济模式中,电机(104)提供驱动力或牵引转矩,使得车辆能够向前和向后运动直到混合动力车辆的预定运行状态参数值。此后,在混合动力车辆的预定运行状态参数值之上,电源开关从电机(104)切换至内燃机(110)以提供驱动力。在转换过程中,发动机启动由通过起动器继电器(111)连接到内燃机(110)的起动器马达(112)执行。在该模式转换期间,车辆模式处理单元(103)处理从三轴加速度传感器接收的输入,将检测到的正梯度值与预定的正梯度值进行比较。此后,如果检测到的正梯度值小于预定的正梯度值,则车辆模式处理单元(103)向电机(104)发出输出指令,使其起到发电机的作用。因此,基于电机(104)和内燃机(110)之间的估计的转矩差将估计的制动转矩施加在电机(104)上。这种现象会生成反向转矩,以允许在模式转换期间从内燃机(110)到车轮(未示出)的最佳转矩传递,以实现平稳过渡。然而,如果检测到的正梯度值大于预定的正梯度值,则没有制动力施加在电机(104)上,因为与平坦道路相比,车辆转矩需求在正梯度上更高。重要的是,正梯度意味着“上坡”。因此,控制系统(100)在不影响车辆性能的情况下消除了模式转换期间的颠簸,从而提高了乘坐舒适性。此外,电机(104)在模式转换过程中生成的可回收电能通过专用再生电路(未显示)存储在电池(未显示)中。
38.图2示出了根据本主题的一个示例的根据替代实施例的用于混合动力车辆(未示出)的驱动模式接合控制系统(100)的示意图。为了简洁起见,仅参考单个发明构思内的替代实施例的不同方面。根据替代实施例,集成起动器发电机(isg)(201)安装在内燃机(110)的曲轴(未示出)上。isg(201)通过从电池(未示出)接收电源来启动内燃机(110)来执行电动功能。此外,它起到电动发电机的作用并为电池(未示出)充电。在过渡阶段期间,isg(201)用作发电机,从而基于电机(104)和内燃机(110)之间的估计的转矩差而将估计的制动转矩施加在曲轴(未示出)上。也就是说,这种现象会生成反向转矩,以允许在模式转换期间从内燃机(110)到车轮(未示出)的最佳转矩传递,以实现平稳过渡。此外,isg(201)在模式转换期间生成的可回收电能通过专用再生电路(未示出)存储在电池(未示出)中。
39.根据另一替代的实施例,基于驾驶状态。在该过渡阶段,电机(104)和isg(201)用作发电机,从而基于电机(104)和内燃机(110)之间的估计的转矩差将估计的制动转矩施加在曲轴(未示出)和电机(103)上,以实现平稳过渡。此外,由电机(104)和isg(201)在模式转换过程中生成的可回收电能通过专用再生电路(未示出)存储在电池(未示出)中。
40.图3示出了根据本主题的一个示例的根据一个实施例的混合动力车辆中电源模式转换时消除颠簸的方法的流程图。在打开点火钥匙之后,电池管理系统激活或者起动驱动模式接合控制系统。此外,在步骤(s101),模式处理单元从用户接收模式转换输入。此后,在步骤(s102),模式处理单元从多个传感器接收实时运行状态参数值。在步骤(s103),车辆模式处理单元将混合动力车辆的实时运行状态参数值与混合动力车辆的预定运行状态参数
值进行比较,并作为第一事件确定混合动力车辆的所述实时运行状态参数值是否小于混合动力车辆的所述预定运行状态参数值。此外,基于所述第一事件,在步骤(s104),车辆模式处理单元保持当前驱动模式。然而,车辆模式处理单元作为第二事件确定混合动力车辆的所述实时运行状态参数值是否大于混合动力车辆的预定运行状态参数值。此后,第二事件还包括在步骤(s105a)检测正梯度值。在步骤(s105b),通过车辆模式处理单元与预定的正梯度值进行比较。此外,在确定检测到的正梯度值是否大于预定的正梯度值时,则在步骤(s105),车辆模式处理单元将驱动模式从当前模式切换到不同于所述当前驱动模式的用户请求模式。然而,如果在确定后,正梯度值小于或等于预定梯度值,则第二事件还包括由所述车辆模式处理单元确定并输出相应的交替信号。根据一个实施例,预定梯度值的范围从3度到7度。确定和输出相应的替代信号包括如所公开的其他步骤。在步骤(s105c),检测电机运行状态参数值和发动机运行状态参数值。根据一个实施例,电机运行状态参数值包含基于相电流、电机转速、电机热状态参数等的计算得到的估计的电机转矩。此外,发动机运行状态包含基于发动机转速、点火正时、歧管进气压力、进气温度、节气门阀的开度和空燃比等计算的估计的发动机转矩。之后,在步骤(s105d),车辆模式处理单元计算所述当前电机运行状态参数值与发动机运行状态参数值之间的差值,并且在步骤(s105e),确定所需的相应的制动转矩。并且,在步骤(s105f),车辆模式处理单元生成相应的输出指令电信号。相应的输出信号包括在一个或多个所述电机和/或isg上施加所需的相应制动转矩以确保平稳过渡,并同时将驱动模式从当前模式切换到不同于所述当前驱动模式的用户请求模式。
41.根据上述架构,本发明的主要功效是在不影响车辆性能的情况下实现平稳的模式转换。具体而言,基于计算出的基于道路倾斜的发动机和电机之间的估计转矩差,将估计的制动转矩应用于电机。
42.根据上述架构,本发明的主要功效之一是在施加制动转矩的同时回收能量并将其存储在电池中。这延长了混合动力车辆在纯电动模式下的行驶范围,从而提高了能量节约。
43.上述实施例,尤其是任何“优选的”实施例,是实施例的可能示例,并且仅为清楚理解本发明的原理而阐述。例如,电机可以是集成的起动器发电机或牵引电动机。此外,混合动力车辆可以包含轮毂电机或独立牵引电机。本领域技术人员将清楚,在不脱离本发明的精神和范围的情况下,可以在其中进行形式、连接和细节的更改。
44.附图标记说明
45.100驱动模式接合控制系统
46.101电池管理系统
47.102模式切换接口
48.103车辆模式处理单元
49.104电机
50.105速度传感器
51.106节气门位置传感器
52.107霍尔传感器
53.108线圈温度传感器
54.109三轴加速度传感器
55.110内燃(ic)发动机
56.111起动器继电器
57.112起动器马达
58.113点火钥匙
59.201集成起动器发电机(isg)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1