混合动力车辆的控制方法及混合动力车辆的控制装置与流程
1.本发明涉及一种混合动力车辆的控制方法及混合动力车辆的控制装置。
背景技术:
2.在电动车辆中,已知有通过发动机等内燃机使发电机动作,将由发电机生成的电力供给驱动系统的电动机的结构。这样的电动车辆由于发电系统和驱动系统串联连接,所以被称为串联型的混合动力车辆。在这样的串联型混合动力车辆中,有可能产生各种固有振动,作为一例,可以列举在将发动机中发生的扭矩向发电机传递的轴中发生的扭转振动等固有振动。
3.在jp2015-074308a中公开了抑制电动车辆中发生的固有振动成分的技术。根据该技术,在对发电机的扭矩指令值的计算过程中,为了控制振动(减振),在进行前馈(f/f)控制的同时,进行反馈(f/b)控制。
4.详细地说,首先,在计算对发电机的扭矩指令值时,对与期望的转数对应的指令值进行f/f滤波处理而计算出f/f扭矩指令值。同时,对转数的推定值与测量值的偏差进行f/b滤波处理而计算出f/b扭矩指令值。最终,将f/f扭矩指令值和f/b扭矩指令值相加,求出对发电机的最终扭矩指令值。通过使用这样的最终扭矩指令值来控制发电机,能够实现固有振动成分的降低。
5.另一方面,在发电系统中,有时在发动机与发电机之间作为声音振动对策而设置有衰减器等连接部。在这样的发电系统中,在发动机失火时等,在连接部会产生发动机的基本次数(固有振动成分)以外的周期干扰,有可能发生系统共振。由于成为这样的系统共振的原因的周期干扰与固有振动成分不同,所以,存在即使使用jp2015-074308a所公开的技术也无法降低的问题。
技术实现要素:
6.于是,为了解决上述问题,本发明的目的在于提供一种混合动力车辆的控制方法及混合动力车辆的控制装置,能够实现抑制因固有振动成分以外的周期干扰引起的系统共振。
7.本发明的一方式的混合动力车辆的控制方法是具有:发动机与驱动轴连接且包含构成为与发动机连动旋转的发电机的发电系统、与发电系统连接且接收来自构成为能够充电的蓄电池的电力供给而进行驱动的驱动系统的混合动力车辆的控制方法。在该控制方法中,根据驱动系统的状态,求出对发电系统的转数指令值,以使发电系统的转数成为转数指令值的方式,求出对发电系统的扭矩指令值,对扭矩指令值进行抑制在发动机与发电机的连接部产生的固有振动成分的减振控制,计算出对发电系统的最终扭矩指令值,在可能发生因与固有振动成分不同的成分的振动引起的系统共振的情况下,不进行减振控制,而将扭矩指令值作为最终扭矩指令值。
附图说明
8.图1是第一实施方式的电动车辆的概略图。
9.图2是表示发电机控制器的详细结构的块图。
10.图3是表示发电控制器的控制的块图。
11.图4是表示减振控制的切换控制的流程图。
12.图5是表示比较例的发电系统的驱动状态的时序图。
13.图6是表示本实施方式的发电系统的驱动状态的时序图。
14.图7是表示第二实施方式的发电控制器的控制的块图。
15.图8是表示减振控制的切换控制的流程图。
16.图9是表示第三实施方式的发电控制器的控制的块图。
17.图10是表示减振控制的切换控制的流程图。
具体实施方式
18.以下,参照附图对本发明的实施方式进行说明。
19.(第一实施方式)
20.图1是第一实施方式的电动车辆的概略图。
21.电动车辆100具备:作为驱动源的驱动系统10、向驱动系统10供给电力的发电系统20、控制驱动系统10及发电系统20的控制系统30。另外,设置有获取向控制系统30的输入值的传感器组40。这样具备发电系统20与驱动系统10串联连接的结构的电动车辆被称为串联混合型。
22.在驱动系统10中,驱动电动机11经由减速器12及轴13与驱动轮14a、14b连接。另外,在驱动逆变器15中,从蓄电池16供给的直流电力被变换为交流电力。通过接收由驱动逆变器15变换后的交流电力的供给而使驱动电动机11旋转,由此对驱动轮14a、14b进行驱动。另外,在电动车辆100进行再生制动的情况下,在驱动电动机11中产生的交流电力在驱动逆变器15中被变换为直流后,向蓄电池16充电。这样,蓄电池16构成为能够充放电。
23.在发电系统20中,发动机21经由衰减器22与发电机23连接,发电机23通过发动机21的驱动而旋转,进行发电。由发电机23发电的交流电力在通过发电机逆变器24变换为直流电力后,向驱动系统10供给。
24.另外,衰减器22用于抑制从发动机21向发电机23传递的扭矩变动,作为一例,是设置在与发动机21的轴连接的内轮毂和与发电机23的轴连接的外轮毂之间的弹簧部件。这样构成的衰减器22能够吸收因内轮毂与和外轮毂的扭转而产生的扭矩变动。衰减器22是发动机21和发电机23的连接部的一例,例如,连接发动机21和发电机23的低刚性的轴也可以是连接部。
25.控制系统30基于从传感器组40输入的车速、加速器踏板操作量以及坡度等,控制驱动系统10以及发电系统20。控制系统30具备:综合控制整体的系统控制器31、控制驱动系统10的驱动电动机控制器32及蓄电池控制器33、控制发电系统20的发电机控制器34及发动机控制器35。
26.系统控制器31综合控制驱动电动机控制器32、蓄电池控制器33、发电机控制器34以及发动机控制器35的整体动作。另外,设置于系统控制器31内的发电控制部311控制蓄电
池控制器33、发电机控制器34以及发动机控制器35。这样,对于发电系统20,通过控制发动机21的驱动以及发电机逆变器24来控制发电量。
27.系统控制器31根据从后述的传感器组40输入的驾驶者的加速器踏板操作量、车速以及坡度等车辆状态、从蓄电池控制器33输入的soc以及可输入输出电力,生成对驱动系统10以及发电系统20的指令值。
28.发电控制部311为了在发电系统20中发电期望的电力,运算对发动机控制器35的扭矩指令值t*、以及对发电机控制器34的转数指令值ωg*。当发动机21以扭矩指令值t*旋转驱动时,发电机23与发动机21连动旋转。发电控制部311通过同时控制发电机逆变器24,能够从发电系统20得到期望的电力。
29.驱动电动机控制器32从驱动电动机11接收转数以及电压等的状态的输入。驱动电动机控制器32基于这些输入,为了实现由系统控制器31生成的扭矩指令值t*,通过进行驱动逆变器15的开关控制,对驱动电动机11施加期望的交流电力,得到期望的扭矩。
30.蓄电池控制器33构成为能够与蓄电池16进行双向通信,基于在蓄电池6中充放电的电流以及电压来计量soc(充电状态:state of charge),输出给系统控制器31。同时,蓄电池控制器33根据蓄电池16的温度、内部电阻以及sco等运算蓄电池16的可输入输出电力,并输出给系统控制器31。
31.发电机控制器34构成为能够检测发电机23的旋转状态,并且对发电机逆变器24进行开关控制,以使发电机23以由发电控制部311生成的转数指令值ωg*旋转。由此,能够从发电系统20向驱动系统10供给期望的直流电力。
32.发动机控制器35根据发动机21的转数和温度,控制发动机21的节气门、点火正时、燃料喷射量,使得以从系统控制器31指令的扭矩指令值t*进行驱动。
33.传感器组40具备:车速传感器41、加速器开度传感器42和坡度传感器3。车速传感器41与驱动轮14a、14b等并列设置,通过测量驱动轮14a、4b的转数来获取电动车辆100的速度。加速器开度传感器42获取加速器踏板的操作量。坡度传感器43检测电动车辆100的行驶路的坡度。通过车速传感器41、加速器开度传感器42以及坡度传感器43获取的车速、加速器踏板操作量以及坡度被输入到系统控制器31。另外,本实施方式的传感器组40所包含的传感器是一例,控制系统30也可以根据来自其他传感器的输入进行控制。
34.图2是表示发电机控制器34的详细结构的块图。发电机23与以扭矩指令值t*驱动的发动机21连动旋转。而且,发电机控制器34控制发电机逆变器24,以使发电机23以转数指令值ωg*进行旋转。这样,在发电机23中产生期望的电力,并将发电电力向驱动系统10供给。
35.发电机控制器34具备:发电控制器341、电流指令值运算器342、电流控制器343、三相二相电流变换器344、dq轴加法器345d、345q、解耦控制器346以及二相三相电压变换器347。以下,对这些结构的详细动作进行说明。
36.发电控制器341接收由系统控制器31生成的转数指令值ωg*、和从与发电机23并设的分解器23a输入的发电机23的实际转数ωg的输入。发电控制器341生成最终扭矩指令值t
fin
*,以使发电机23的转数成为转数指令值ωg*。
37.电流指令值运算器342接收由发电控制器341生成的最终扭矩指令值t
fin
*、在发电机逆变器24中的pwm信号的生成中使用的直流电压值vdc、以及由分解器23a检测出的实际
转数ωg的输入。然后,电流指令值运算器342基于这些输入,生成对发电机23的dq轴电流指令值id*、iq*。
38.电流控制器343从电流指令值运算器342接收dq轴电流指令值id*、iq*以及从三相二相电流变换器344接收dq轴电流测量值id、iq的输入。电流控制器343生成dq轴电压指令值vd*、vq*,以使dq轴电流id、iq分别与dq轴电流指令值id*、iq*指令值相等。
39.另外,三相二相电流变换器344通过对由设置在发电机逆变器24与发电机23之间的uv轴电流传感器23u、23v检测出的uv轴电流测量值iu、iv进行从uvw相向dq轴的变换,生成dq轴电流测量值id、iq。另外,由于uvw相的电流矢量的总和为零,因此通过测量uvw相中的2个相(uv相)的电流,能够知道所有相的电流。
40.而且,在电流控制器343的后段设置有dq轴加法器345d、345q。dq轴加法器345d、345q分别将从电流控制器343输出的dq轴电压指令值vd*、vq*与从解耦控制器346输出的dq轴解耦控制指令值v
d_dcpl
*、v
q_dcpl
*相加,生成最终dq轴电压指令值vd*'、vq*'。
41.另外,解耦控制器346从三相二相电流变换器344接收dq轴电流测量值id、iq的输入,计算出用于抵消在d轴与q轴之间产生的干扰成分所需的dq轴解耦控制指令值v
d_dcpl
*、v
q_dcpl
*。
42.二相三相电压变换器347在接收到从dq轴加法器345d、345q输出的最终dq轴电压指令值vd*'、vq*'后,对这些输入进行从dq轴向uvw相的变换,由此计算出uvw相电压指令值vu*、vv*、vw*。然后,二相三相电压变换器347将uvw相电压指令值vu*、vv*、vw*输出给发电机逆变器24。
43.发电机逆变器24根据uvw相电压指令值vu*、vv*、vw*进行pwm控制。由此,在发电机23中发电的交流电力被变换为直流电力,并提供给驱动系统10。
44.在此,如果将在发电控制器341中生成的最终扭矩指令值t
fin
*设为指令值,则电流指令值运算器342~二相三相电压变换器347、发电机逆变器24以及发电机23成为作为控制对象系统的发电设备200。即,发电设备200针对最终扭矩指令值t
fin
*的输入,向驱动系统10输出发电电力,并且对发电控制器341反馈输入发电机23的实际转数ωg。
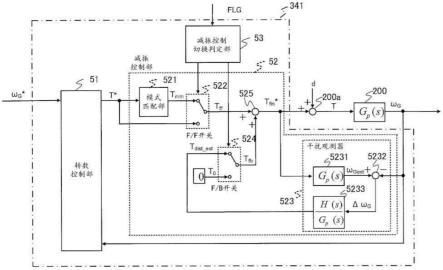
45.图3是表示发电控制器341的控制的块图。在该图中,用单点划线表示发电控制器341,并且表示了控制对象的发电设备200。
46.发电控制器341根据来自系统控制器31的转数指令值ωg*的输入、来自构成发电设备200的发电机23的实际转数ωg的反馈输入、以及发动机21的失火判定标志flg的输入,输出对发电设备200的指令值即最终扭矩指令值t
fin
*。另外,失火判定标志flg例如通过在系统控制器31中检测发动机21的转速的异常而检测出。以下,对发电控制器341的详细结构进行说明。
47.发电控制器341包括:转数控制部51、减振控制部52、减振控制切换判定部53。
48.转数控制部51接收由系统控制器31(图3中未图示)生成的转数指令值ωg*、以及作为发电设备200的一部分的发电机23的实际转数ωg。转数控制部51例如以使实际转数ωg成为转数指令值ωg*的方式进行pi控制,生成用于进行转数控制的扭矩指令值t*。扭矩指令值t*被输出到减振控制部52。
49.在减振控制部52中,进行前馈(f/f)控制及反馈(f/b)控制。详细地说,减振控制部52具有:与f/f控制相关联的模式匹配部521、f/f开关522、与f/b控制相关联的干扰观测器
523、f/b开关524。
50.模式匹配部521由gm(s)/gp(s)的滤波器构成,进行抑制传递系统的振动的f/f控制。即,通过对扭矩指令值t*进行gm(s)/gp(s)的滤波处理,进行减振效果高的f/f控制,生成模式匹配扭矩t
mm
。另外,gp(s)是表示在发电设备200(发电机23)中以扭矩t为输入,以转数ωg为输出的传递特性的模式。gm(s)是表示在理想的发电设备200中以扭矩t为输入,以转数ωg为输出的传递特性的模式(理想模式)。
51.f/f开关522根据来自减振控制切换判定部53的输入,切换有无模式匹配部521对从转数控制部51输出的扭矩指令值t*进行的滤波处理。在f/f开关522接通的情况下,经过了模式匹配部521的模式匹配扭矩t
mm
作为f/f扭矩t
ff
被输出。在f/f开关522断开的情况下,不经过模式匹配部521,而将扭矩指令值t*作为f/f扭矩t
ff
输出。f/f扭矩t
ff
是第一指令值的一例。
52.干扰观测器523包括:干扰推定块5231、减法器5232以及f/b滤波器5233。干扰观测器523基于来自f/f开关522的最终扭矩指令值t
fin
*、以及来自发电设备200的实际转数ωg的输入,计算出干扰推定扭矩t
dist_est
。详细的结构如下。
53.干扰推定块5231通过对从f/f开关522输出的最终扭矩指令值t
fin
*进行使用了发电设备200的传递特性gp(s)的处理,来计算出转数推定值ω
gest
。
54.减法器5232从由干扰推定块5231计算出的转数推定值ω
gest
中减去从发电设备200输出的实际转数ωg,而计算出偏差δωg。在此,转数推定值ω
gest
是与指令值对应的值,实际转数ωg是测量值,因此能够基于两者的偏差δωg进行f/b控制。
55.f/b滤波器5233通过对由减法器5232计算出的偏差δωg进行滤波处理,计算出干扰推定扭矩t
dist_est
。在此,f/b滤波器5233是h(s)/gp(s),由作为发电设备200的传递特性gp(s)的逆特性的1/gp(s)、和具有中心频率与发电设备200的共振频率一致的特性的带通滤波器h(s)构成。另外,发电设备200的共振频率是因在衰减器22中产生的扭转振动引起的共振频率。
56.f/b开关524根据来自减振控制切换判定部53的输入,切换有无应用由干扰观测器523计算出的干扰推定扭矩t
dist_est
。在f/b开关524接通的情况下,将干扰推定扭矩t
dist_est
作为f/b扭矩t
fb
输出。在f/b开关524断开的情况下,将零扭矩t0作为f/b扭矩t
fb
输出。另外,f/b扭矩t
fb
是第二指令值的一例。
57.加法器525将从f/f开关522输出的f/f扭矩t
ff
和从f/b开关524输出的f/b扭矩t
fb
相加,输出最终扭矩指令值t
fin
*。另外,从加法器525输出的最终扭矩指令值t
fin
*在受到干扰d的影响之后,被输入到发电设备200。另外,在该图中,以干扰d经由加法器200a进行影响的方式进行模式化表示。
58.减振控制切换判定部53切换减振控制部52内的f/f开关522以及f/b开关524。另外,该切换控制的详细情况如图4所示。
59.图4是表示基于减振控制切换判定部53的减振控制切换控制的流程图。另外,该减振切换控制作为程序存储在构成控制系统30的控制器中。
60.在步骤s1中,减振控制切换判定部53判定是否从系统控制器31接收到表示发动机21的失火的失火判定标志flg。减振控制切换判定部53在接收到失火判定标志flg的情况下(s1:是),接着进行步骤s2的处理。另一方面,减振控制切换判定部53在未接收到失火判定
标志flg的情况下(s1:否),接着进行步骤s3的处理。
61.在步骤s2中,减振控制切换判定部53使f/f开关522以及f/b开关524都断开,停止f/f以及f/b双方的减振控制。
62.在步骤s3中,减振控制切换判定部53使f/f开关522以及f/b开关524都接通,开始f/f以及f/b双方的减振控制。
63.这样,在未接收到失火判定标志flg的通常运转时,减振控制切换判定部53使f/f开关522以及f/b开关524都接通而运转。即,进行f/f控制和f/b控制,将模式匹配扭矩t
mm
作为f/f扭矩t
ff
输出,并且将干扰推定扭矩t
dist_est
作为f/b扭矩t
fb
输出。由此,能够同时抑制衰减器22中的扭转固有振动成分和来自发动机21的周期干扰(扭矩脉动等)。
64.另一方面,在接收到失火判定标志flg的情况下,减振控制切换判定部53使f/f开关522以及f/b开关524都断开而运转。即,不进行f/f控制及f/b控制,而将用于转数控制的扭矩指令值t*作为f/f扭矩t
ff
输出,并且将零扭矩t0作为f/b扭矩t
fb
输出。
65.在此,在发动机21失火的情况下,会产生发电设备200的固有振动成分以外的手动干扰。因此,即使使用利用了发电设备200的传递特性gp(s)的f/f控制、以及利用了来自发电设备200的输出的f/b控制,也有可能无法减振。其结果是,在衰减器22的扭转角度超过允许范围的状态下,会产生固有振动成分以外的周期干扰,如果进行减振控制,则会因该周期干扰而发生系统共振。另外,这样的衰减器22中的现象被称为“触底”。
66.于是,通过减振控制切换判定部53使f/f开关522以及f/b开关524都断开,避免了系统共振,其结果是,能够使衰减器22中的扭转角的输入不超过允许范围而抑制发生触底,因此能够防止系统共振的发生。
67.在此,使用图5、图6说明通过进行本实施方式所示的减振控制切换判定而得到的效果。
68.图5是表示比较例的发电系统20的驱动状态的时序图。在该图的例子中,没有设置本实施方式那样的减振控制切换判定部53,在全部时间带进行f/f控制以及使用了f/b控制的减振控制。
69.图6是表示本实施方式的发电系统20的驱动状态的图。因此,设置有减振控制切换判定部53,在发动机21失火时,停止减振控制。
70.图5、图6都从上方示出了发动机21的转数、发电机23的驱动扭矩以及衰减器22的扭转扭矩这三种参数的变化。详细地说,示出了在使发动机21的转数随着时间的经过而变大的情况下的、发电机23的产生扭矩以及衰减器22中的扭转扭矩。
71.比较两者,特别是在图中央附近的时间带中,图6的例子与图5的例子相比,扭矩中产生的振幅小。因此,由于衰减器22中的扭矩不会超过允许范围(不会发生触底),因此能够抑制发动机21与发电机23之间的轴的扭转角变大,能够抑制因固有频率以外的成分引起的系统共振的发生。
72.另外,在本实施方式中,说明了在发电机控制器34的转数ωg的控制中将发电机23的转数作为控制对象的例子,但不限于此。发电机控制器34也可以将发动机21的转数作为控制对象。
73.根据第一实施方式,能够得到以下的效果。
74.使用第一实施方式的控制方法的电动车辆100是驱动系统10和发电系统20串联连
接的串联混合型,使用最终扭矩指令值t
fin
*进行发电系统20的发电机23的转数的控制。
75.在系统控制器31的发电控制部311中,求出根据驱动系统10的状态求出的转数指令值ωg*。而且,在发电控制器341内,转数控制部51以使发电机23的转数ωg成为转数指令值ωg*的方式求出扭矩指令值t*,减振控制部52对扭矩指令值t*进行减振控制,由此计算出最终扭矩指令值t
fin
*。
76.例如,如果发动机21失火,在发电设备200中产生因固有频率以外的成分引起的系统共振,则衰减器22中的扭转角度会超过允许范围,有可能产生固有振动成分以外的振动(周期干扰)。在产生该振动的情况下,如果进行去除固有振动成分的减振控制,则会发生系统共振。因此,在可能产生可能成为系统共振的原因的振动(周期干扰)的情况下,即在检测出发动机21的失火的情况下,减振控制切换判定部53以不进行减振控制的方式进行切换,由此能够抑制系统共振。
77.特别是,若发生系统共振,则在连接发动机21和发电机23的衰减器22中,扭转角度会超过允许范围,发动机21的扭矩不能适当地传递到发电机23,有可能产生大的振动和声音。但是,由于通过减振控制切换判定部53断开减振控制来抑制系统共振,因此能够抑制衰减器22中的扭矩传递的异常的发生。
78.另一方面,在未确认到发动机21的失火,减振控制切换判定部53未接收到失火标志的情况下,接通开关522、524来进行减振控制。其结果是,能够对衰减器22的扭转固有振动成分和来自发动机21的周期干扰(扭矩脉动等)进行减振控制。
79.另外,根据第一实施方式的电动车辆100的控制方法,在减振控制部52中,模式匹配部521进行降低扭转振动成分的前馈控制,由此计算出作为第一指令值的模式匹配扭矩t
mm
,将基于最终扭矩指令值t
fin
*求出的转数推定值ω
gest
与实际转数ωg的偏差δωg推定为干扰,通过进行反馈控制以抑制该干扰,求出作为第二指令值的干扰推定扭矩t
dist_est
。然后,加法器525通过将模式匹配扭矩t
mm
和干扰推定扭矩t
dist_est
相加,计算出最终扭矩指令值t
fin
*。这样,通过组合f/f控制和f/b控制,能够更有效地进行减振控制。
80.通过进行这样的减振控制,在不发生系统共振的情况下,能够抑制衰减器22的扭转固有振动成分和来自发动机21的周期干扰(扭矩脉动等),因此能够抑制发电设备200的固有振动成分,稳定地驱动发电系统20。
81.(第二实施方式)
82.在第一实施方式中,说明了在发动机21失火时抑制减振控制的例子,但不限于此。在第二实施方式中,作为抑制减振控制的条件,对转数较高的情况的例子进行说明。
83.图7是表示第二实施方式的发电控制器341的控制的块图。与图3所示的第一实施方式的发电控制器341的块图相比,向减振控制切换判定部53的输入变更为从发电设备200输出的转数ωg。
84.图8是表示减振控制切换判定部53的减振控制切换控制的流程图。
85.在步骤s1中,减振控制切换判定部53判定从发电设备200输出的转数ωg是否大于规定的阈值ω
gth
。在此,阈值ω
gth
是发动机21失火等的可能性高的发电机23的转数。因此,在发动机21的转数ωg大于规定的阈值ω
gth
的情况下,发生系统共振的可能性高。
86.减振控制切换判定部53在转数ωg大于规定的阈值ω
gth
的情况下(s1:是),接着进行步骤s2的处理,抑制减振控制。另一方面,减振控制切换判定部53在转数ωg不大于规定
的阈值ω
gth
的情况下(s1:否),接着进行步骤s3的处理,进行减振控制。
87.这样,在转数ωg比较小的情况下,减振控制切换判定部53使f/f开关522以及f/b开关524都接通而运转。另一方面,在转数ωg比较大的情况下,减振控制切换判定部53使f/f开关522以及f/b开关524都断开而运转。
88.在此,发动机21与连接于驱动轮的比较大型的装置不同,仅用于发电,因此失火的可能性高。当发动机21失火时,产生固有振动成分以外的振动(周期干扰),发生系统共振的可能性大。于是,在发动机21正在燃烧那样的发电机23的转数ωg比较大的情况下,通过抑制减振控制,能够降低该系统共振。其结果是,能够避免输入衰减器22中的允许范围的扭转角,其结果是,能够抑制产生大的振动(触底)。另一方面,在发电机23的转数ωg比较小的情况下,是发动机21未开始燃烧的电动回转的阶段,难以产生振动(周期干扰),难以发生系统共振。于是,通过进行减振控制,能够抑制固有振动成分的振动,能够实现整体的振动的降低。
89.另外,如果在发动机21起动时比较转数ωg和燃烧状态,则首先发电机23作为起动机驱动而开始旋转(电动回转)。然后,转数ωg变大,对发动机21点火,若转数ωg进一步变大,则发动机21稳定地燃烧(firing点燃)。在此,在发动机21点火后,发动机21失火而发生系统共振的可能性高。于是,通过将阈值ω
gth
设定为电动回转后的燃烧开始的转数,在转数ωg大于阈值ω
gth
的情况下断开减振控制,能够抑制因失火引起的系统共振,其结果是,能够防止衰减器22的触底。
90.根据第二实施方式,能够得到以下的效果。
91.根据第二实施方式的电动车辆100的控制方法,在发动机21起动后的转数ωg比较大的情况下,由于发动机21的失火等而产生固有振动成分以外的振动(周期干扰)所引起的系统共振的可能性高,因此抑制减振控制。由此,能够抑制系统共振的发生,其结果是,能够避免输入衰减器22中的允许范围的扭转角,能够抑制因触底引起的较大振动的发生。
92.另一方面,在转数ωg比较小的情况下,能够假定发动机21处于电动回转状态。因此,难以产生固有振动成分以外的振动,难以发生系统共振,通过进行减振控制能够降低振动。其结果是,由于被减振控制的指令值被输入到发电设备200,因此能够实现对衰减器22的扭转固有振动成分和来自发动机21的周期干扰(发动机的扭矩脉动等)的减振效果。
93.另外,与进行失火判定的情况相比,通过使用转数ωg,减振控制的切换判定所需要的时间变短。其结果是,在产生周期干扰的情况下,能够更早期地断开减振控制,因此能够抑制系统共振的发生。
94.根据第二实施方式的电动车辆100的控制方法,将在使用了转数ωg的减振控制的切换判定中使用的阈值ω
gth
设定在进行电动回转的转数与电动回转后开始燃烧(点燃)的转数的边界。在转数ωg大于阈值ω
gth
的情况下,由于是开始发动机21的点燃的阶段,所以与电动回转状态相比,发生因失火引起的系统共振的可能性高。于是,通过断开减振控制,能够抑制因失火引起的系统共振的发生。另一方面,在转数ωg小于阈值ω
gth
的情况下,进行电动回转,因此发动机21失火的可能性低,发生系统共振的可能性低。于是,通过接通减振控制,能够实现固有振动成分的抑制。
95.(第三实施方式)
96.在第二实施方式中,作为抑制减振控制的条件,说明了转数比较高的情况的例子,
但不限于此。在第三实施方式中,作为抑制减振控制的条件,对使用发电设备200(发动机21/发电机23)的输出的例子进行说明。
97.图9是表示第三实施方式的发电控制器341的控制的块图。与图3所示的第二实施方式的发电控制器341的块图相比,从积分器54向减振控制切换判定部53输入发电设备200的输出。
98.详细地说,当积分器54从发电设备200接收到转数ωg、从加法器525接收到最终扭矩指令值t
fin
*的输入时,对两者进行积分,并将输出p向减振控制切换判定部53输出。
99.图10是表示减振控制切换判定部53的减振控制切换控制的流程图。
100.在步骤s1中,减振控制切换判定部53判定发电设备200的输出p是否为正。减振控制切换判定部53在输出p为正的情况下(s1:是),接着进行步骤s2的处理,抑制减振控制。另一方面,减振控制切换判定部53在输出p为负的情况下(s1:否),接着进行步骤s3的处理,进行减振控制。
101.这样,在输出p为正的情况下,减振控制切换判定部53使f/f开关522以及f/b开关524都接通而运转。另一方面,在输出p为负的情况下,减振控制切换判定部53使f/f开关522以及f/b开关524都断开而运转。
102.在此,在输出p为正的情况下,发电机23为再生状态,进行发动机21的电动回转。因此,发生因失火引起的系统共振的可能性较低,所以通过接通减振控制能够抑制发电设备200的振动。另一方面,在输出p为负的情况下,发电机23进行发电,进行发动机21的燃烧。因此,发生因失火引起的系统共振的可能性比电动回转状态高,所以将减振控制设为断开。其结果是,能够避免输入衰减器22中的允许范围的扭转角,抑制较大振动的发生,其结果是,能够抑制因固有振动成分以外的振动(周期干扰)引起的系统共振的发生。
103.另外,在第三实施方式中,将转数ωg与最终扭矩指令值t
fin
*之积作为输出p,但不限于此。例如,也可以将从图2的三相二相电流变换器344输出的dq轴电流id、iq与从dq轴加法器345d、345q输出的dq轴电压指令值vd*、vq*之积(id×vd
*+iq×vq
*)作为输出p。
104.根据第三实施方式,能够得到以下的效果。
105.根据第三实施方式的电动车辆100的控制方法,在发电机23的输出p较小的情况下,由于发电机23发电,所以发动机21进行点燃,由于失火等而发生因固有振动成分以外的振动(周期干扰)所引起的系统共振的可能性较高,所以抑制减振控制。由此,可抑制系统共振的发生,其结果是,避免输入衰减器22中的允许范围的扭转角,可抑制大的振动的发生,其结果是,能够抑制因固有振动成分以外的振动引起的系统共振的发生。另一方面,在发电机23的输出p比较大的情况下,发动机21进行电动回转,难以发生固有振动成分以外的振动,难以发生系统共振,因此通过进行减振控制能够降低振动。
106.根据第三实施方式的电动车辆100的控制方法,将在使用了发电机23的输出p的减振控制的切换判定中使用的阈值p
th
设定为零。由此,使发动机21的点燃/电动回转的状态与发电机23的发电/再生的状态相对应。其结果是,在发电机23的输出为正且处于发电状态的情况下,由于发动机21开始燃烧,所以失火的概率更高,因此通过断开减振控制能够抑制系统共振的发生。
107.另外,在第一实施方式中使用失火判定标志flg、在第二实施方式中使用转数ωg、在第三实施方式中使用发电设备200的输出p来切换有无减振控制,但不限于此。在有可能
发生因发电设备200的固有振动成分以外的振动(周期干扰)引起的系统共振的情况下,通过省略减振控制,能够抑制该系统共振。
108.另外,关于第一至第三实施方式中的判定条件,可以分别使用,也可以进行组合来判定有无减振控制。
109.另外,本发明并不限定于上述的实施方式,当然可以在权利请求范围所记载的技术思想的范围内进行各种变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1