新能源汽车整车控制器中实现倒车定速蠕行的控制方法与流程
1.本发明涉及一种实现新能源汽车倒车蠕行车速稳定的控制方法,尤其涉及一种新能源汽车中整车控制器实现定速倒车蠕行功能的控制方法。
背景技术:
2.新能源汽车在倒车蠕行时会有一个车速限制,为实现此蠕行倒车车速限制功能,整车控制器的通常做法是:通过标定手段得出某种工况下该车实现目标车速的需求扭矩,整车控制器将扭矩发送给电机控制器,电机根据需求扭矩执行输出,实现倒车蠕行限速功能。但单一工况下的扭矩标定数据难以保证在其他工况下车速的稳定,例如在倒车时遇到上坡,由于阻力增大原来的输出扭矩就不足以使车达到目标车速,造成车速下降甚至停车的状况。
技术实现要素:
3.本发明的目的在于克服已有技术的缺点,提供一种新能源汽车整车控制器中实现倒车定速蠕行的控制方法,当额定倒车扭矩不足以使车辆达到目标车速时可通过计算主动增加扭矩(不超过蠕行扭矩上限值)保证车辆达到设定的蠕行车速,当车速超过目标车速时通过计算主动降低扭矩,保证车辆稳定在目标车速。本发明控制方法可以保证无论是在无障碍的平坦道路或是有斜坡或其他障碍道路工况,整车控制器均可保证车辆的倒车蠕行车速稳定;可将车速限制在规定倒车蠕行极限车速下,保证车辆安全;可以减少因为驾驶员油门深度踩踏不合理造成的车速过快发生意外的可能性。
4.为了解决上述技术问题,本发明提出的一种新能源汽车整车控制器中实现倒车定速蠕行的控制方法,主要是设计出一个倒车蠕行扭矩补偿倍率值表,计算当前车速与目标车速的差值并将其划分成n个区间,计算变速周期计数值,通过车速差值与周期计数表,得到一个扭矩补偿倍率值,用额定扭矩值乘以扭矩补偿倍率值,得到对应的当前车速下的扭矩输出值,从而当额定倒车扭矩不足以使车辆达到目标车速时,整车控制器计算得到一个大于1的倒车蠕行扭矩补偿倍率值,且速度差越大,倍率值越大,用额定扭矩乘以补偿倍率从而主动增加扭矩以保证车辆达到设定的蠕行车速,并且速度差越大扭矩值越大,使车辆速度提升越快,速度差越小扭矩值越小,使车辆速度提升越慢;当车速超过目标车速时,整车控制器计算得到一个小于1的倒车蠕行扭矩补偿倍率值,且速度差越小倍率值越小,用额定扭矩乘以补偿倍率从而主动降低扭矩,并且速度差越小扭矩值越小,使车辆速度减速越快,速度差越大扭矩值越大,使车辆速度减速越慢,保证车辆稳定在目标车速。
5.本发明方法包括以下步骤:
6.步骤一、基于倒车蠕行目标车速与车辆实际车速的车速差及变速周期,设计一个倒车蠕行扭矩补偿倍率值表,通过查表获得倒车蠕行扭矩补偿倍率值t
m
;
7.步骤二、计算倒车蠕行扭矩输出值t
p
=t0*t
m
,其中,t0为额定倒车蠕行扭矩值,t0的数值根据车辆的车型参数确定;
8.步骤三、利用得到的倒车蠕行扭矩输出值t
p
进行实车参数标定,根据实车参数标定的结果对倒车蠕行扭矩补偿倍率值t
m
进行修正,以修正后的扭矩补偿倍率值t
m’计算得到当前的倒车蠕行扭矩输出值t
p’=t0*t
m
,,使车辆实现倒车定速蠕行。
9.进一步讲,本发明所述的实现倒车定速蠕行的控制方法,其中:
10.步骤一中,将计算得到的车速差值划分成n个速差区间,根据车速差值的正负将设定的周期计数值按照步长为1s递增或递减划分为m个计数区间,当额定倒车蠕行扭矩不足以使车辆达到倒车蠕行目标车速时,倒车蠕行扭矩补偿倍率值t
m
<1,且速度差越大,t
m
值越大,使车辆速度减速越慢;当额定倒车蠕行扭矩使车速超过目标车速时,倒车蠕行扭矩补偿倍率值t
m
>1,且速度差越小,t
m
值越小,车辆速度减速越快。具体内容如下:
11.1)计算车速差s
d
:设倒车蠕行目标车速为s
t
=5km/h,整车控制器采集到的车辆实际车速为s
r
,倒车蠕行目标车速与车辆实际车速的车速差s
d
,s
d
=s
t
‑
s
r
,s
d
、s
t
和s
r
的单位均为km/h,车速差s
d
的范围为
‑
2~+5km/h,按照1km/h的间隔划分为n个速差区间,n=8,车速差s
d
<=
‑
2为速差区间1,车速差
‑
2<s
d
<=
‑
1为速差区间2,车速差
‑
1<s
d
<=0为速差区间3,车速差0<s
d
<=1为速差区间4,车速差1<s
d
<=2为速差区间5,车速差2<s
d
<=3为速差区间6,车速差3<s
d
<=4为速差区间7,车速差4<s
d
<=5为速差区间8;
12.2)设定变速周期计数值t
c
,且0≤t
c
≤t
max
,其中,t
max
为定值,t
max
取值为5,表示车速从0km/h加速到最大倒车蠕行车速设定的理论最大时间;当s
d
>0时,t
c
按照每周期递增1s进行累加,直到t
c
=t
max
为止;当s
d
≤0时,t
c
按照每周期递减1s进行累减,直到t
c
=0为止;将t
c
设定m个计数区间,m=6,t
c
=0为计数区间1,t
c
=1为计数区间2,t
c
=2为计数区间3,t
c
=3为计数区间4,t
c
=4为计数区间5,t
c
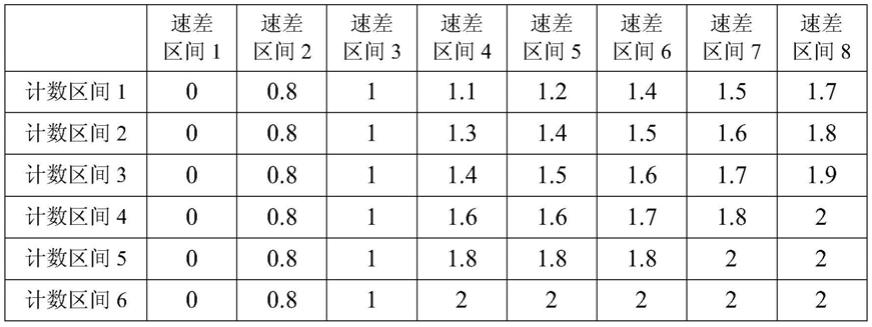
=5为计数区间6;
13.3)设置补偿扭矩倍率值表,其中的横坐标为车速差s
d
,纵坐标为变速周期计数值t
c
,对应的倒车蠕行扭矩补偿倍率值t
m
如表1所示。
14.表1倒车蠕行扭矩补偿倍率值t
m
[0015][0016]
步骤三中,实车参数标定:标定工程师进行倒车蠕行实验,在控制车辆倒车蠕行的过程中,按照得到的倒车蠕行扭矩输出值驱动车辆行驶,若车辆速度的变化值超过(
±
3km/h)/s,则对上述查表得到的倒车蠕行扭矩补偿倍率值t
m
进行修正,修正后的倒车蠕行扭矩补偿倍率值t
m’=t
m
±
(0.1~0.2),且0≤t
m’≤2。
[0017]
与现有技术相比,本发明的有益效果是:
[0018]
(1)无论是在无障碍的平坦道路工况,还是在有斜坡或其他障碍道路工况,整车控制器均可保证车辆的倒车蠕行车速稳定,不会出现因阻力增大,输出的驱动扭矩不足导致
速度降低的问题和因阻力减小,输出的驱动扭矩过高导致速度超过极限速度的问题;
[0019]
(2)可将车速限制在规定倒车蠕行极限车速下,保证车辆安全;
[0020]
(3)驾驶员在倒车遇到障碍时可不用执行踩油门踏板的操作,减少因为驾驶员油门深度踩踏不合理造成的车速过快发生意外的可能性。
具体实施方式
[0021]
下面结合具体实施例对本发明做进一步的说明,但绝非对本发明有任何限制。
[0022]
本发明的设计思路是,通过在不同工况下主动增加或是降低扭矩,得到当时工况下车辆的倒车蠕行扭矩输出值;即当额定倒车扭矩不足以使车辆达到目标车速时,整车控制器通过计算得到倒车蠕行扭矩补偿倍率值(大于1),用额定扭矩乘以补偿倍率从而主动增加扭矩以保证车辆达到设定的蠕行车速,当车速超过目标车速时通过计算得到倒车蠕行扭矩补偿倍率值(小于1),用额定扭矩乘以补偿倍率从而主动降低扭矩,保证车辆稳定在目标车速。无论是在无障碍的平坦道路或是有斜坡或其他障碍道路工况,整车控制器均可保证车辆的倒车蠕行车速稳定;可将车速限制在规定倒车蠕行极限车速下,保证车辆安全;可以减少因为驾驶员油门深度踩踏不合理造成的车速过快发生意外的可能性。
[0023]
实施例:以一款新能源物流车为例,该车在平坦路面上空载时的倒车蠕行扭矩值t0为43nm(最大输出扭矩不超过86nm)倒车蠕行目标车速s
t
为5m/s,扭矩计算周期为1s,则周期计数值t
c
每秒加1,加速到最大倒车蠕行车速设定的理论最大时间t
max
为5(即t
c
累加到5时不再增加)
[0024]
步骤一:确定所述的倒车蠕行扭矩补偿倍率值,包括:
[0025]1‑
1)计算车速差:根据s
d
=s
t
‑
s
r
,s
t
=5km/h,将车速差以1km/h为一组划分为8个速差区间:如表1的横坐标所示。
[0026]1‑
2)设定变速周期计数值t
c
,因为t
max
=5;则0≤t
c
≤5,当s
d
>0时t
c
=t
c
+1,直到t
c
=5km/h为止;当s
d
≤0时t
c
=t
c
‑
1,直到t
c
=0为止;设定t
max
为5,则对应设定6个计数区间,如表1的纵坐标所示。
[0027]1‑
3)设置二维补偿扭矩倍率值表,其中的横坐标为倒车蠕行目标车速与倒车蠕行实际车速的差s
d
,纵坐标为变速周期计数值t
c
;根据不同车速差s
d
值和不同计数周期t
c
值查表可得到对应的扭矩补偿倍率值,如表1中与横纵坐标对应的数值。
[0028]
步骤二:确定倒车蠕行扭矩输出值t
p
:
[0029]
因为t0=43,根据t
p
=t0*t
m
可得倒车蠕行扭矩输出值t
p
=43*t
m
。
[0030]
通过以上内容,每周期根据公式s
d
=s
t
‑
s
r
和t
p
=t0*t
m
计算出一个变速周期计数值t
c
和一个车速差值s
d
,根据t
c
和s
d
查表1得到一个倒车蠕行扭矩补偿倍率值t
m
,最终公式t
p
=t0*t
m
,得到一个倒车蠕行扭矩输出值t
p
,其中,t0为额定倒车蠕行扭矩值,t0的数值根据车辆的车型参数确定,本实施例中,t0=43nm。
[0031]
下一个周期车速发生变化,若车速增大则速度差s
d
减小,则通过表1可以看到扭矩补偿倍率值t
m
减小,扭矩输出值t
p
减小,且车速增加越快,扭矩输出值t
p
降低的越多;若车速减小则速度差s
d
增大,则通过表格可以看到扭矩补偿倍率值t
m
增大,扭矩输出值t
p
增大,且车速减小越快,扭矩输出值t
p
增大的越多。
[0032]
每个周期通过上述步骤进行计算得出新的扭矩输出值t
p
,循环往复从而根据车速
不断调整扭矩值输出值直到将车速差s
d
降低到0km/h附近。
[0033]
步骤三、实车参数标定:
[0034]
因具体车型不同,需要标定工程师在本发明中提出的补偿扭矩倍率值表的前提下进行具体车型的实车参数标定,标定工程师进行倒车蠕行实验,在控制车辆倒车蠕行的过程中,若通过车速差值与周期计数值的对应关系从表中1所选定的补偿扭矩倍率值,在使用过程中使车辆速度的变化值超过了(
±
3km/h)/s,则以0nm为扭矩下限,以2倍t
p
为扭矩上限,在不超过扭矩上下限的前提下,在原选定的倒车蠕行扭矩补偿倍率值t
m
进行修正,修正后的倒车蠕行扭矩补偿倍率值t
m’=t
m
±
(0.1~0.2),且0≤t
m’≤2。即在选定的倒车蠕行扭矩补偿倍率值t
m
的基础上增加或者减小0.1到0.2,以维持平稳车辆运行,例如:t
c
=0时,实际车速为0,目标车速为5km/h,此时s
d
=5,通过查表得到的t
m
为1.7,根据t
p
=43*t
m
可得到此时的t
p
=73.1nm,车辆按照此功率输出,1s后实际车速若为4km/h,此时,车辆加速过快,应将s
d
=5,t
c
=0时对应的t
m
值由1.7减小到1.6或1.5,最终确定的倒车蠕行扭矩补偿倍率值t
m’=t
m
‑
(0.1~0.2)=1.7
‑
(0.1~0.2)=1.6或1.5,然后,按照倒车蠕行扭矩补偿倍率值为1.5或1.6计算得到当前倒车蠕行扭矩输出值为t
p’=43*t
m’=64.5~68.6nm,从而可以避免车辆出现急加速或急减速得到情况。
[0035]
尽管上面对本发明进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨的情况下,还可以做出很多变形,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1