车辆的制作方法
1.本发明涉及一种具备制动系统和驱动系统的车辆。
背景技术:
2.以往,例如,在前后左右具有四个车轮的普通车辆中,针对四个车轮均配备有所谓的摩擦制动装置。典型的是摩擦制动装置被配置为包括:盘形转子等与车轮一同旋转的旋转体、被按压至该旋转体的制动垫块等摩擦构件以及用于将该摩擦构件按压至该旋转体的致动器。近年来,还研究了在所谓的电动汽车中如下述专利文献所述代替这样的摩擦制动装置而采用再生制动器即利用了由作为车辆的驱动源的电动马达实现的能量再生的制动器。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2013-135532号公报
6.摩擦制动装置具有悠久的历史,可靠性优异,但另一方面,由于车轮的轮辋内配设有一些构成要素,因此在构造上受限制。另一方面,虽然再生制动能仅通过驱动系统来实现而无需用于产生制动力的特别的构成要素,但也存在无法获得大的制动力这一缺点。通过在摩擦制动装置与再生制动器的组合上进行钻研,能提高车辆的实用性。本发明是鉴于这样的实际情况而完成的,以提供实用性高的车辆为技术问题。
技术实现要素:
7.为了解决上述技术问题,本发明的车辆具备:左右两个前轮和左右两个后轮;制动系统,能利用摩擦力,将制动力相互独立地仅赋予到所述两个前轮和所述两个后轮中的一方的各个轮;以及驱动系统,通过与所述两个前轮和所述两个后轮中的至少另一方的各个轮对应的作为驱动源的电动马达的力来驱动该各个轮,并且能利用由对应的所述电动马达实现的再生来将制动力相互独立地赋予到该各个轮。
8.考虑到摩擦制动装置的可靠性要高,摩擦制动装置要能赋予较大的制动力,理想的是,制动系统赋予制动力的前轮和后轮中的一方为前轮。此外,从该车辆的结构尽可能简单的观点出发,理想的是,驱动系统仅驱动前轮和后轮中的未被制动系统赋予制动力的另一方,就是说,仅对该另一方赋予由再生产生的制动力。
9.从将再生制动力赋予到车轮这一观点出发,理想的是,驱动系统被配置为包括多个轮内马达型车轮驱动装置,所述多个轮内马达型车轮驱动装置设于分别被驱动的每个车轮并在该车轮的轮辋内配置有所述电动马达。详细而言,是因为:轮内马达型车轮驱动装置与电动马达配设于车身的驱动装置不同,无需较长的驱动轴,因此,在针对再生制动的abs动作(防抱死制动动作)中响应性优异。
10.制动系统在包括与左右的车轮对应的两个车轮制动装置的情况下以如下方式配置即可,即,该两个车轮制动装置的每一个具有:旋转体,与车轮一同旋转;摩擦构件,被按
压至该旋转体;以及制动致动器,由将车轮保持为可旋转的轮架保持,该制动致动器使自身所具有的活塞前进,从而将所述摩擦构件按压至所述旋转体。
11.上述制动致动器能设为电动制动致动器,其具有:作为驱动源的电动马达;以及动作转换机构,将该电动马达的旋转动作转换成所述活塞的进退动作。就是说,能将上述车轮制动装置设为通过电动马达的力来将摩擦构件按压至旋转体的电动制动装置。电动制动装置对制动力请求的响应性优异。
12.此外,还能将上述制动致动器设为具有通过供给至该制动致动器自身的工作液的压力来使上述活塞前进的液压缸的液压制动致动器。在该情况下,制动系统设为具备工作液供给装置,该工作液供给装置以如下方式配置即可:具有液压源,并将来自该液压源的工作液供给至两个车轮制动装置各自的液压制动致动器的液压缸,并且能单独调整供给至各液压缸的工作液的压力。就是说,也能采用可靠性较高的液压制动系统来作为制动系统。在采用液压制动系统的情况下,从故障保护的观点出发,理想的是配置为:具有由驾驶员操作的制动操作构件,在例如上述工作液供给装置发生电气故障时等情况下,能通过由驾驶员施加于制动操作构件的力来对供给至各液压缸的工作液进行加压。
13.对由驱动系统的再生制动产生的制动力(以下,有时称为“再生制动力”)和由制动系统产生的制动力(以下,有时称为“摩擦制动力”)的产生进行说明,例如,鉴于该车辆的节能的观点,理想的是设为:针对向该车辆的制动力请求,优先产生由驱动系统产生的制动力即再生制动力,不足部分通过制动系统的制动力即摩擦制动力来供应。
14.制动系统和驱动系统均设为能对自身要赋予制动力的多个车轮单独赋予制动力,因此,在本车辆中,对于车轮被赋予制动力时的该车轮的锁定,无论该车轮为前后左右哪个车轮,都能对其进行abs动作。详细而言,能设为:对于车轮被赋予了制动力时的该车轮的锁定,在制动系统和驱动系统中的一方对该车轮赋予了制动力的情况下,该一方进行abs动作,在制动系统和驱动系统中的两方对该车轮赋予了制动力的情况下,该两方进行abs动作。
15.发明效果
16.上述制动系统被配置为包括摩擦制动装置,上述驱动系统实现再生制动。简而言之,本发明的车辆能考虑设为将摩擦制动装置只设于前轮和后轮中的一方并针对前轮和后轮中的至少另一方采用了再生制动的车辆。摩擦制动装置仅设于两个车轮,而不是设于所有的四个车轮,因此,该车辆整体中的制动力产生部在构造上的限制较小,反过来,由于在两个车轮设有摩擦制动装置,因此能保证该制动力产生部的可靠性。此外,由于至少能使再生制动作用于未设置摩擦制动装置的车轮,因此,本发明的车辆还能充分响应较大的制动力请求。
附图说明
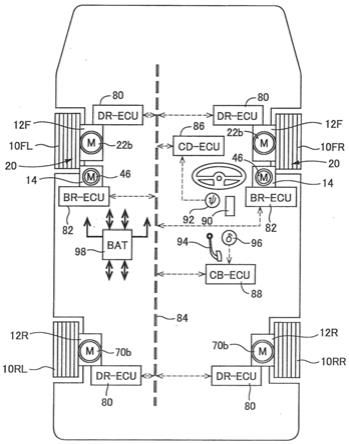
17.图1是表示第一实施例的车辆的整体构成的示意图。
18.图2是表示被配置为包括前轮驱动装置和车轮制动装置的车轮配设模块的立体图。
19.图3是表示车轮制动装置的图。
20.图4是车轮制动装置所具有的制动致动器的剖视图。
21.图5是表示后轮驱动装置的图。
22.图6是在第一实施例的车辆中执行的统一驱动控制程序的流程图。
23.图7是在第一实施例的车辆中执行的统一制动控制程序的流程图。
24.图8是在第一实施例的车辆中执行的车轮驱动控制程序和车轮制动控制程序的流程图。
25.图9是表示第二实施例的车辆的整体构成的示意图。
26.图10是表示第二实施例的车辆所具备的制动系统的液压回路图和构成该系统的车轮制动装置的概略结构的剖视图。
27.图11是在第二实施例的车辆中执行的制动控制程序的流程图。
28.图12是表示第三实施例的车辆的整体构成的示意图。
29.图13是表示第四实施例的车辆的整体构成的示意图。
30.图14是表示第一变形例的车辆的整体构成的示意图。
31.图15是表示第二变形例的车辆的整体构成的示意图。
32.图16是表示第三变形例的车辆的整体构成的示意图。
33.图17是表示第四变形例的车辆的整体构成的示意图。
34.附图标记说明
35.10:车轮(10f:前轮、10r:后轮);12:车轮驱动装置(12f:前轮驱动装置、12r:后轮驱动装置);14:车轮制动装置;20:车轮配设模块;22:车轮驱动单元;22b:驱动马达(电动马达);30:盘形转子(旋转体);32:制动钳;34a、34b:制动垫块(摩擦构件);40:制动致动器;44:活塞;46:制动马达(电动马达);54:动作转换机构;60:车轮转舵装置;70:车轮驱动单元;70b:驱动马达(电动马达);80:驱动电子控制单元(dr-ecu);82:制动电子控制单元(br-ecu);84:can;86:统一驱动电子控制单元(cd-ecu);88:统一制动电子控制单元(cb-ecu);90:加速踏板;94:制动踏板(制动操作构件);110:主缸;112:工作液供给装置;114:车轮制动装置;116:制动电子控制单元(br-ecu);130:盘形转子(旋转体);132:制动钳;134:制动垫块(摩擦构件);136:制动致动器;136a:活塞;136b:轮缸。
具体实施方式
36.以下,作为用于实施本发明的实施方式,参照附图对作为本发明的实施例的若干车辆及其变形例进行详细说明。需要说明的是,本发明除了下述实施例之外,以上述技术方案中记载的方案为首,能通过基于本领域技术人员的知识实施了各种变更、改进的各种实施方式来实施。需要说明的是,实施例、变形例的车辆是具有前后左右四个车轮的车辆,在以下的说明中,将这四个车轮分别表示为左前轮10fl、右前轮10fr、左后轮10rl、右后轮10rr,并且,在无需区别左右的情况下,有时候将左前轮10fl、右前轮10fr的各个统称为前轮10f,将左后轮10rl、右后轮10rr的各个统称为后轮10r,进而,在无需区别前后左右的情况下,有时候将左前轮10fl、右前轮10fr、左后轮10rl、右后轮10rr的各个统称为车轮10。
37.[实施例1]
[0038]
第一实施例的车辆的整体构成如图1中示意性所示,具备:驱动系统,被配置为包括分别驱动四个车轮10的四个车轮驱动装置12;以及制动系统,被配置为包括分别对左右的前轮10f进行制动的两个车轮制动装置14。需要说明的是,有时候区别性地将针对两个前
轮10f的两个车轮驱动装置12的各个称为前轮驱动装置12f,将针对两个后轮10r的两个车轮驱动装置12的各个称为后轮驱动装置12r。
[0039]
i)前轮侧的硬件构成
[0040]
前轮驱动装置12f和车轮制动装置14被组装于图2所示的车轮配设模块20(以下,有时仅称为“模块20”)。模块20是用于将装接有轮胎10a的轮10b配设于车身的模块。可以将轮10b本身视为车轮10,但在本实施例中,为了便于说明,将装接有轮胎10a的轮10b称为车轮10。
[0041]
前轮驱动装置12f被配置为以车轮驱动单元22为核心元件。车轮驱动单元22具有:壳体22a;驱动马达22b和减速器22c,其中驱动马达22b是内置于壳体22a的作为驱动源的电动马达,减速器22c使该驱动马达22b的旋转减速(驱动马达22b和减速器22c均省略了构造的图示);以及车轴轮毂,装配有轮10b(在图中隐藏不可见)。车轮驱动单元22是配置于轮10b的轮辋10c的内侧的称为所谓的轮内马达单元的单元,前轮驱动装置12f是轮内马达型车轮驱动装置。车轮驱动单元22具有公知的构造,因此,在此对其省略说明。
[0042]
前轮驱动装置12f通过向驱动马达22b供给电流来以与该电流的大小相应的驱动力驱动前轮10f。另一方面,能通过在驱动马达22b中产生电流并将该电流回收至电源,也就是通过进行能量再生,来对前轮10f赋予针对其旋转的制动力(以下,有时称为“车轮旋转制动力”),该电流基于通过前轮10f的旋转而产生的电动势。就是说,设为前轮驱动装置12f也通过将驱动马达22b用作发电机来作为车轮再生制动装置发挥功能。
[0043]
本模块20被配置为包括麦弗逊式悬架装置(也称为“麦弗逊支柱式”)。在该悬架装置中,车轮驱动单元22的壳体22a作为以车轮可旋转的方式保持车轮并且容许车轮相对于车身的上下运动的轮架发挥功能,进一步而言,壳体22a作为后文说明的车轮转舵装置中的转向节发挥功能。因此,悬架装置被配置为包括:作为悬架臂的下臂24、车轮驱动单元22的壳体22a、减震器26以及悬架弹簧28。悬架装置本身为普通构造的悬架装置,因此省略详细说明。
[0044]
车轮制动装置14被配置为包括:盘形转子30,是与轮10b一同装配于车轴轮毂并与车轮10一同旋转的旋转体;以及制动钳32,以跨越该盘形转子30的方式被保持在车轮驱动单元22的壳体22a。制动钳32具有:作为摩擦构件的制动垫块;以及制动致动器,具有电动马达,用于通过该电动马达的力来将制动垫块按压至盘形转子30从而停止车轮10的旋转。
[0045]
参照图3进行详细说明,制动钳32(以下,有时仅称为“钳32”)以跨越盘形转子30的方式,以能在轴线方向(图3的左右方向)上移动的方式被保持在设于车轮驱动单元22的壳体22a的安装件。制动垫块34a、34b(以下,有时仅称为“垫块34a、34b”)以轴线方向的移动被容许的状态,以夹住盘形转子30的方式被保持在安装件。
[0046]
为了便于说明,以图中的左方作为前方并以右方作为后方进行说明,前方侧的垫块34a设为支承于作为钳主体36的前端部的爪部38。制动致动器40(以下,有时仅称为“致动器40”)以该致动器40的壳体42被固定于钳主体36的后方侧的部分的方式被保持于钳主体36的后方侧的部分。致动器40具有以可进退的方式被保持在壳体42的活塞44,该活塞44前进,由此顶端部与后方侧的垫块34b卡合。然后,活塞44在卡合的状态下进一步前进,由此,一对垫块34a、34b以夹紧盘形转子30的方式被按压至盘形转子30。通过该按压,产生取决于盘形转子30与垫块34a、34b之间的摩擦力的针对车轮的旋转的制动力即车轮摩擦制动力也
就是用于使车辆减速、停止的制动力。
[0047]
参照表示剖面的图4对致动器40进行简单说明,致动器40是电动制动致动器,被配置为除了上述的壳体42、活塞44之外,还包括制动马达46、减速器构50以及动作转换机构54等,该制动马达46是作为驱动源的电动马达,该减速器构50用于使制动马达46的旋转(详细而言是中空的马达轴48的旋转)减速,该动作转换机构54具有通过经由该减速器构50而进行的制动马达46的旋转而被旋转的旋转轴52,将该旋转轴52的旋转动作转换成活塞44的进退动作。通过控制针对制动马达46的供给电流,活塞44进退,垫块34a、34b对盘形转子30的按压力即车轮摩擦制动力的大小与被供给的电流的大小大致成比例。顺便一说,减速器构50是包括串联配置的两个内接式行星齿轮机构的差动减速机构,动作转换机构54是螺杆机构。需要说明的是,车轮制动装置14是被配置为包括作为电动制动致动器的致动器40的电动制动装置,响应性优异。简而言之,实际的制动力的产生相对于制动力请求的延迟小。
[0048]
前轮10f是转舵轮,模块20中如图2所示除了前轮驱动装置12f、车轮制动装置14之外还组装有车轮转舵装置60。车轮转舵装置60被配置为包括:固定于下臂24的转舵致动器62、横拉杆64以及从车轮驱动单元22的壳体22a延伸出的转向节臂22d。转舵致动器62具有:转舵马达62a,是作为驱动源的电动马达;减速器62b,使转舵马达62a的旋转减速;以及致动臂62c,通过经由转舵马达62a而进行的减速器62b的旋转而被转动,作为转向摇臂发挥功能。横拉杆64连结致动臂62c和转向节臂22d。通过使转舵马达62a工作,如图2中粗箭头所示,致动臂62c被转动,该转动通过横拉杆64被传递,前轮10f绕主销轴线kp被转舵。
[0049]
本模块20是组装有车轮驱动装置12、车轮制动装置14、车轮转舵装置60而模块化的模块,能简便地进行车轮驱动装置12、车轮制动装置14、车轮转舵装置60向车身的组装作业。简而言之,能通过将下臂24的基端部装配于车身的纵梁并将构成减震器26、悬架弹簧28的上端部的上支承件66装配于车身的轮胎壳体的上部来将该模块20搭载于车辆,即,能一次将车轮驱动装置12、车轮制动装置14、车轮转舵装置60搭载于车辆。如此,本模块20被设为相对于车辆的搭载性优异的模块。
[0050]
需要说明的是,作为摩擦制动装置的车轮制动装置14是长年累月普遍使用的装置,可靠性高。因此,由于本车辆如后文所说明的那样虽然不在后轮10r那一侧设置摩擦制动装置但针对前轮10f设有摩擦制动装置,换言之,由于在前轮和后轮中的一方设有摩擦制动装置,因此,保证了该车辆整体的制动力产生部的可靠性。
[0051]
而且,前轮驱动装置12f是轮内马达型车轮驱动装置,并且还作为车轮再生制动装置发挥功能。在驱动马达配设于车身的车轮驱动装置的情况下,驱动马达与车轴轮毂之间通过较长的驱动轴连结,在与后述的再生制动力关联的abs动作中,该驱动轴的存在成为因扭转弹性而导致的响应延迟的一个原因。简而言之,在解除、产生再生制动力时,迅速的解除、产生被该扭转弹性阻碍。从附图可知,本车辆中不配设这样的驱动轴。因此,由前轮驱动装置12f进行的abs动作响应性良好。
[0052]
ii)后轮侧的硬件构成
[0053]
在后轮10r侧配备有拖臂型的悬架装置,如图5所示,作为后轮驱动装置12r的核心构成要素的车轮驱动单元70固定安装于拖臂72的后端部。拖臂72在前端部以能以在车宽度方向延伸的转动轴线tl为中心转动的方式支承于车身。需要说明的是,在图中,关于悬架装置,省略了悬架弹簧、减震器等其他的构成要素。
[0054]
车轮驱动单元70与上文说明过的车轮驱动单元22同样,具有:壳体70a;驱动马达70b和减速器22c,其中驱动马达70b是内置于壳体70a的作为驱动源的电动马达,减速器70c使该驱动马达70b的旋转减速(驱动马达70b和减速器70c均省略了构造的图示);以及车轴轮毂70d,装配有轮10b。车轮驱动单元70是配置于轮10b的轮辋10c的内侧的称为所谓的轮内马达单元的单元,后轮驱动装置12r与前轮驱动装置12f同样是轮内马达型车轮驱动装置。车轮驱动单元70与车轮驱动单元22同样具有公知的构造,因此在此对其省略说明。
[0055]
后轮驱动装置12r与前轮驱动装置12f同样,通过向驱动马达70b供给电流来以与该电流的大小相应的驱动力驱动后轮10r。另一方面,与前轮驱动装置12f同样,能通过在驱动马达70b中产生电流并将该电流回收至电源,也就是通过进行能量再生,来对后轮10r赋予车轮再生制动力,该电流基于通过后轮10r的旋转而产生的电动势。就是说,设为后轮驱动装置12r也通过将驱动马达70b用作发电机来作为车轮再生制动装置发挥功能。
[0056]
与前轮10f有所不同,不针对后轮10r设置摩擦制动装置。从图2可知,作为摩擦制动装置的车轮制动装置14在轮辋10c内配设有盘形转子30、制动钳32,相对于轮辋10c内的其他的构成要素的配设受限制。相对于此,后轮10r侧的轮辋10c内不复杂,相对简洁。就是说,本车辆仅在前轮和后轮中的一方设有摩擦制动装置,因此,该车辆整体中的制动力产生部在构造上的限制较小。顺便一说,在本车辆中,考虑到要获得较大的制动力这方面的优点,针对前轮10f而不是后轮10r设有摩擦制动装置。
[0057]
需要说明的是,后轮驱动装置12r也与前轮驱动装置12f同样,是轮内马达型车轮驱动装置,并且还作为车轮再生制动装置发挥功能。因此,由于与前文针对前轮驱动装置12f说明过的相同的理由,由后轮驱动装置12r进行的abs动作也响应性良好。
[0058]
iii)与控制有关的硬件构成
[0059]
驱动系统针对四个车轮10分别设有四个车轮驱动装置12,能分别对四个车轮10独立地赋予车轮驱动力、车轮再生制动力。此外,制动系统针对两个前轮10f分别设有两个车轮制动装置14,能分别对两个前轮10f独立地赋予车轮摩擦制动力。
[0060]
如图1所示,为了进行独立的针对车轮10的车轮驱动力、车轮再生制动力的赋予,在驱动系统中,两个前轮驱动装置12f、两个后轮驱动装置12r分别由对应的四个驱动电子控制单元80(以下,有时称为“驱动ecu80”,在图中表示为“dr-ecu”)控制。分别构成前轮驱动装置12f、后轮驱动装置12r的车轮驱动单元22、车轮驱动单元70的驱动马达22b、70b是三相的无刷dc马达,作为控制器发挥功能的驱动ecu80被配置为包括:作为驱动马达22b、70b的驱动电路的逆变器、经由该逆变器来控制驱动马达22b、70b的工作的计算机(具有cpu、rom、ram等)等。
[0061]
此外,为了进行独立的车轮摩擦制动力的赋予,在制动系统中,两个车轮制动装置14分别由对应的两个制动电子控制单元82(以下,有时称为“制动ecu82”,在图中表示为“br-ecu”)控制。构成车轮制动装置14的致动器40的制动马达46是三相的无刷dc马达,作为控制器发挥功能的制动ecu82被配置为包括:作为制动马达46的驱动电路的逆变器、经由该逆变器来控制制动马达46的工作的计算机(具有cpu、rom、ram等)。
[0062]
四个驱动ecu80、两个制动ecu82连接于can(car area network or controllable area network:汽车局域网或可控局域网)84。此外,can84连接有统一控制两个前轮驱动装置12f、两个后轮驱动装置12r的统一驱动电子控制单元86(以下,有时称为“统一驱动
ecu86”,在图中表示为“cd-ecu”)和统一控制两个车轮制动装置14的统一制动电子控制单元88(以下,有时称为“统一制动ecu88”,在图中表示为“cb-ecu”)。
[0063]
统一驱动ecu86以具有cpu、rom、ram等的计算机来作为核心构成要素,基于来自用于检测作为加速操作构件的加速踏板90的操作量即加速操作量ψ的加速操作量传感器92的信号,统一控制两个前轮驱动装置12f、两个后轮驱动装置12r。统一制动ecu88以具有cpu、rom、ram等的计算机来作为核心构成要素,基于来自用于检测作为制动操作构件的制动踏板94的操作量即制动操作量δ的制动操作量传感器96的信号,统一控制两个的车轮制动装置14。
[0064]
本车辆中设有电池98,以便进行经由驱动ecu80而进行的前轮驱动装置12f、后轮驱动装置12r向驱动马达22b、70b的电流供给、来自驱动马达22b、70b的再生能量的蓄电、经由制动ecu82而进行的车轮制动装置14向制动马达46的电流供给。
[0065]
iv)驱动力、制动力的控制
[0066]
在本车辆中,统一驱动ecu86、四个驱动ecu80、统一制动ecu88、两个制动ecu82经由can84来收发信息,并且协同执行驱动力f
d
、制动力f
b
的控制。具体而言,通过由统一驱动ecu86、各驱动ecu80、统一制动ecu88、各制动ecu82(详细而言是它们各自的计算机)分别以短时间间距(例如数m~数十msec)重复执行图6~图8中如流程图所示的统一驱动控制程序、车轮驱动控制程序、统一制动控制程序、车轮制动控制程序,来进行驱动力f
d
、制动力f
b
的控制。以下,通过对基于各程序的处理进行说明,来对该车辆中的驱动力f
d
、制动力f
b
的控制进行说明。
[0067]
统一驱动ecu86执行基于统一驱动控制程序的处理。详细而言,在步骤1(以下简称为“s1”。其他的步骤也同样如此。)中,统一驱动ecu86判定该车辆中是否有驱动力f
d
的请求。具体而言,在加速踏板90被驾驶员踩踏操作的情况和进行自动驾驶时有来自自动驾驶系统(省略图示)的请求的情况下,判定为有驱动力f
d
的请求。在判定为有驱动力f
d
的请求的情况下,在s2中,确定作为车辆整体所需的驱动力f
d
的整体驱动力f
dt
。具体而言,对于有赖于加速踏板90的操作的驱动力f
d
的请求,基于加速操作量ψ来决定整体驱动力f
dt
,对于有赖于自动驾驶的驱动力f
d
的请求,确认从自动驾驶系统作为信息发送来的整体驱动力f
dt
。接着,在s3中,统一驱动ecu86基于整体驱动力f
dt
,根据预先设定的针对各车轮10的分配,决定作为应赋予到各车轮10的驱动力f
d
的车轮驱动力f
dw
。然后,在s4中,统一驱动ecu86向各车轮10的驱动ecu80发送有关车轮驱动力f
dw
的指示。顺便一说,在s1中判定为没有驱动力f
d
的请求的情况下,跳过s2~s4的处理。
[0068]
接着,在s5中,统一驱动ecu86获取作为各车轮10的旋转速度的车轮速v
w
。具体而言,在驱动马达22b、70b分别设有马达旋转角传感器(例如为旋转变压器、霍尔ic等)以进行电流供给时的通电相的切换,根据基于有赖于该传感器的检测的马达旋转速度而由各驱动ecu80确定出的车轮速v
w
信息,统一驱动ecu86获取各车轮10的车轮速v
w
。接着,在s6中,统一驱动ecu86基于获取到的各车轮10的车轮速v
w
来决定作为该车辆的行驶速度的车速v,在s7中,向各驱动ecu80、各制动ecu82发送对应的车轮10的车轮速v
w
信息和车速v信息。
[0069]
进而,在s8中,统一驱动ecu86确定作为电池98的蓄电余量的电池余量q。换言之,确定之后能充多少电量。然后,在s9中,统一驱动ecu86基于已确定的电池余量q和已决定的车速v来确定作为能赋予到各车轮10的最大的再生制动力f
br
的最大车轮再生制动力
f
brw
‑
max
,并通过合计这些最大车轮再生制动力f
brw
‑
max
来确定作为整体上能赋予到该车辆的再生制动力f
br
的最大整体再生制动力f
brt
‑
max
。
[0070]
接着,在s10中,统一驱动ecu86基于来自统一制动ecu88的信息来判定是否有制动力f
b
的请求。在有制动力f
b
的请求的情况下,在s11中,根据从统一制动ecu88发送来的信息,确认整体制动力f
bt
。在接下来的s12中,统一驱动ecu86判定已确认的整体制动力f
bt
是否大于已确定的最大整体再生制动力f
brt
‑
max
。
[0071]
在整体制动力f
bt
为最大整体再生制动力f
brt
‑
max
以下的情况下,在s13中,统一驱动ecu86根据预先设定的分配来分配整体制动力f
bt
,决定作为应赋予到各车轮10的再生制动力f
br
的车轮再生制动力f
brw
。另一方面,在整体制动力f
bt
超过最大整体再生制动力f
brt
‑
max
的情况下,在s14中,统一驱动ecu86决定车轮再生制动力f
brw
为最大车轮再生制动力f
brw
‑
max
。然后,在s15中,确认不足制动力f
bi
,该不足制动力f
bi
是以最大整体再生制动力f
brt
‑
max
不足以供应整体制动力f
bt
的部分,在s16中,将有关该不足制动力f
bi
的信息发送至统一制动ecu88。
[0072]
在s17中,统一驱动ecu86向各车轮10的驱动ecu80发送与已决定的车轮再生制动力f
brw
有关的指示。顺便一说,在s10中判定为没有制动力f
b
的请求的情况下跳过s11以后的处理。从s11以后的处理可知,在本车辆中,从节能的观点出发,再生制动力f
br
优先于在制动系统中赋予的制动力f
b
即摩擦制动力f
bf
被赋予。
[0073]
统一制动ecu88进行基于统一制动控制程序的处理。详细而言,在s21中,统一制动ecu88判定该车辆中是否有制动力f
b
的请求。具体而言,在制动踏板94被驾驶员踩踏操作的情况和进行自动驾驶时有来自自动驾驶系统请求的情况下,判定为有制动力f
b
的请求。在判定为有制动力f
b
的请求的情况下,在s22中,确定作为车辆整体所需的制动力f
b
的整体制动力f
bt
。具体而言,对于有赖于制动踏板94的操作的制动力f
b
的请求,基于制动操作量δ来决定整体制动力f
bt
,对于有赖于自动驾驶的制动力f
b
的请求,确认从自动驾驶系统作为信息发送来的整体制动力f
bt
。接着,在s23中,统一制动ecu88向统一驱动ecu86发送有关整体制动力f
bt
的信息。
[0074]
在s24中,统一制动ecu88基于来自统一驱动ecu86的有关不足制动力f
bi
的信息来判定是否存在应被摩擦制动力f
bf
覆盖的不足制动力f
bi
。在存在不足制动力f
bi
的情况下,在s25中,统一制动ecu88根据预先设定的分配来分配不足制动力f
bi
,决定作为制动系统应在各车轮10中产生的摩擦制动力f
bf
的车轮摩擦制动力f
bfw
。然后,在s26中,统一制动ecu88向各车轮10的制动ecu82发送有关已决定的车轮摩擦制动力f
bfw
的指示。顺便一说,在s21中判定为没有制动力的请求的情况和在s24中判定为不存在不足制动力f
bi
的情况下,跳过这些判定以后的处理。
[0075]
各车轮10的驱动ecu80执行基于车轮驱动控制程序的处理。详细而言,在s31中,驱动ecu80基于来自统一驱动ecu86的有关车轮驱动力f
dw
的信息来判定是否应向作为自身的控制对象的车轮10赋予车轮驱动力f
dw
。在被请求了车轮驱动力f
dw
的赋予的情况下,在s32中,驱动ecu80基于该信息来确定车轮驱动力f
dw
,在s33中,将基于该车轮驱动力f
dw
的电流供给至车轮驱动装置12的驱动马达22b、70b。
[0076]
此外,在s34中,驱动ecu80基于来自统一驱动ecu86的有关车轮再生制动力f
brw
的信息,判定是否被请求了向作为自身的控制对象的车轮10赋予再生制动力f
br
。在被请求了
再生制动力f
br
的赋予的情况下,在s35中,驱动ecu80基于来自统一驱动ecu86的车轮速v
w
信息、车速v信息来判定该车轮10是否发生了锁定。在未发生锁定的情况下,在s36中确定应赋予的车轮再生制动力f
brw
,在s37中执行基于该车轮再生制动力f
brw
由驱动马达22b、70b实现的再生制动。顺便一说,在s35中判定为车轮10锁定的情况下,不对车轮10赋予再生制动力f
br
。就是说,即使对车轮10赋予了再生制动力f
br
,在车轮10已锁定时,所赋予的再生制动力f
br
也会被解除。如此执行abs动作。需要说明的是,在s31中判定为没有车轮驱动力f
dw
的请求的情况下,跳过s32、s33的处理,在s34中判定为没有车轮再生制动力f
brw
的请求的情况下,跳过其后的处理。
[0077]
各车轮10的制动ecu82执行基于车轮制动控制程序的处理。详细而言,在s41中,制动ecu82基于来自统一制动ecu88的有关车轮摩擦制动力f
bfw
的信息,判定是否被请求了向作为自身的控制对象的车轮10赋予摩擦制动力f
bf
。在被请求了摩擦制动力f
bf
的赋予的情况下,在s42中,制动ecu82基于来自统一驱动ecu86的车轮速v
w
信息、车速v信息来判定该车轮10是否发生了锁定。在未发生锁定的情况下,在s43中确定应赋予的车轮摩擦制动力f
bfw
,在s44中将基于车轮摩擦制动力f
bfw
的电流供给至车轮制动装置14的制动马达46。顺便一说,在s42中判定为车轮10锁定的情况下,不对车轮10赋予摩擦制动力f
bf
。就是说,即使对车轮10赋予了摩擦制动力f
bf
,在车轮10已锁定时,所赋予的摩擦制动力f
bf
也会被解除。如此执行abs动作。需要说明的是,在s41中判定为没有车轮摩擦制动力f
bfw
的请求的情况下跳过其后的处理。
[0078]
车轮驱动装置12和车轮制动装置14都被配置为仅对一个车轮独立地赋予再生制动力f
br
、摩擦制动力f
bf
,因此,该车辆能按每个车轮10来执行abs动作。
[0079]
[实施例2]
[0080]
第二实施例的车辆如图9中示意性所示,仅在制动系统上与第一实施例的车辆不同,因此,对于与第一实施例的车辆的构成要素相同的构成要素使用相同的附图标记并省略其说明。
[0081]
第二实施例的车辆中的制动系统是有赖于工作液的压力而进行工作的液压制动系统,被配置为包括:(a)主缸110,连结有制动踏板94;(b)工作液供给装置112,使来自主缸110的工作液在自身中通过来供给工作液,或将由自身所具有的泵(后述)加压后的工作液进行压力调节来供给工作液;(c)两个车轮制动装置114,分别设于左右的前轮10f,用于通过从工作液供给装置112供给的工作液的压力来使左右的前轮10f各自的旋转减速;以及(d)制动电子控制单元116(以下,有时称为“制动ecu116”,在图中表示为“br-ecu”),负责该制动系统的控制。顺便一说,也能考虑包括主缸110、工作液供给装置112、两个车轮制动装置114而构成一个制动装置。
[0082]
参照图10的(a)的液压回路图进行简单说明,主缸110是串联型的气缸装置,在壳体内部包括:两个活塞110a,连结于制动踏板94并且相互串联地配置;以及两个加压室110b,通过这些活塞110a的移动来对导入自身的工作液进行加压,主缸110附属设置有在大气压下储留工作液的储存器110c。主缸110将与施加于制动踏板94的力(以下,有时称为“制动操作力”)相应压力的工作液按照与两个前轮10f对应的两个系统供给至工作液供给装置112。
[0083]
工作液供给装置112被配置为包括:两条主液体通路112a,使从主缸110供给来的
工作液在自身中通过并前往车轮制动装置114;主切断阀112b,是分别接通、切断这两条主液体通路112a的常开型的电磁式开闭阀;两个泵112c,分别作为液压源发挥功能,与两个系统对应;泵马达112d,驱动这些泵112c;控制保持阀112e,是与两个系统对应的两个电磁式线性阀;截止阀112f,是与这些控制保持阀112e串联配置的两个常闭型的电磁式开闭阀;以及两个止回阀112g,分别与这些控制保持阀112e并联配置。两个泵112c被设为从上述的储存器110c经由储存器液体通路112h汲取工作液。各泵112c被设为在排出侧与主液体通路112a相连,经由该主液体通路112a的一部分向各车轮制动装置114供给加压后的工作液。需要说明的是,在各泵112c的排出侧分别设有用于缓和从泵112c排出的工作液的压力的脉动性变化的缓冲器112i。此外,在工作液供给装置112内形成有与各泵112c并联地将主液体通路112a与储存器液体通路112h相连的两条反馈路径112j,在这些反馈路径112j分别设有上述控制保持阀112e、截止阀112f。
[0084]
正常工作时(未发生电气故障的情况),主切断阀112b、截止阀112f分别处于闭阀状态、开阀状态。通过由泵马达112d驱动泵112c,对储存器110c的工作液进行加压并供给至车轮制动装置114。控制保持阀112e具有将供给至车轮制动装置114的工作液的压力调整至与供给至自身的励磁电流相应的压力的功能。需要说明的是,控制保持阀112e为减压用的阀,因此,工作液在控制保持阀112e中通过以调整压力。该通过的工作液经由反馈路径112j和处于开阀状态的截止阀112f返回储存器液体通路112h,进而返回储存器110c。顺便一说,在主液体通路112a的一方,经由作为常闭型的电磁式开闭阀的模拟器接通阀118连接有行程模拟器120。正常工作时(未发生电气故障的情况),模拟器接通阀118被励磁而处于开阀状态,行程模拟器120发挥功能。
[0085]
另一方面,在该制动系统发了电气故障的情况下,主切断阀112b、截止阀112f分别处于开阀状态、闭阀状态,从主缸110供给至工作液供给装置112的工作液被供给至车轮制动装置114。需要说明的是,在工作液供给装置112中,用于检测供给至车轮制动装置114的工作液的压力(以下,有时称为“轮缸压力”)的轮缸压力传感器112k、用于检测从主缸110供给的工作液的压力的主压力传感器112l与两个系统对应地分别各设有两个。
[0086]
如图10的(b)所示,车轮制动装置114与配备于第一实施例的车辆的车轮制动装置14同样,被配置为包括:盘形转子130,是与车轮10一同旋转的旋转体;以及制动钳132,以跨越该盘形转子130的方式被保持在车轮驱动单元22的壳体22a。制动钳132具有:作为摩擦构件的一对制动垫块134;以及制动致动器136,固定保持在钳主体132a,用于将这些制动垫块134按压至盘形转子130。制动致动器136是具有活塞136a和作为通过供给至自身的工作液的压力来使活塞136a前进的液压缸的轮缸136b的液压制动致动器。
[0087]
向轮缸136b的工作液室136c供给来自工作液供给装置112的工作液,通过该工作液的压力,活塞136a前进,一对制动垫块134夹紧盘形转子130。通过该夹紧,将利用了摩擦力的制动力赋予到前轮10f。详细而言,通过控制分别供给至工作液供给装置112的两个控制保持阀112e的励磁电流,将车轮摩擦制动力相互独立地赋予到两个前轮10f,相互独立地控制该车轮摩擦制动力。
[0088]
制动ecu116被配置为包括具有cpu、rom、ram等的计算机和工作液供给装置112的控制保持阀112e、泵马达112d等的驱动电路。该计算机以短时间间距(例如数m~数十msec)重复执行图11中示出流程图的制动控制程序,通过该执行,制动ecu116控制赋予到两个前
轮10f的车轮摩擦制动力f
bfw
。
[0089]
对基于制动控制程序的处理进行说明,在s51中,制动ecu116判定该车辆中是否有制动力f
b
的请求。具体而言,在制动踏板94被驾驶员踩踏操作的情况和进行自动驾驶时有来自自动驾驶系统的请求的情况下,判定为有制动力f
b
的请求。在判定为有制动力f
b
的请求的情况下,在s52中将工作液供给装置112的泵马达112d设为工作(on)状态,在s53中确定作为车辆整体所需的制动力f
b
的整体制动力f
bt
。具体而言,对于有赖于制动踏板94的操作的制动力f
b
的请求,基于制动操作量δ来决定整体制动力f
bt
,对于有赖于自动驾驶的制动力f
b
的请求,确认从自动驾驶系统作为信息发送来的整体制动力f
bt
。接着,在s54中,制动ecu116向统一驱动ecu86发送有关整体制动力f
bt
的信息。
[0090]
在s55中,制动ecu116基于来自统一驱动ecu86的有关不足制动力f
bi
的信息来判定是否存在应被摩擦制动力f
bf
覆盖的不足制动力f
bi
。在存在不足制动力f
bi
的情况下,在s56中,制动ecu116分配不足制动力f
bi
,决定作为制动系统应在各车轮10中产生的摩擦制动力f
bf
的车轮摩擦制动力f
bfw
。在s55中判定为不存在不足制动力f
bi
的情况下,结束该制动控制程序的一次执行。
[0091]
接着,在s57中,制动ecu116基于来自统一驱动ecu86的车轮速v
w
信息、车速v信息来判定左侧的车轮10是否发生了锁定。在未发生锁定的情况下,在s58中,向与左侧的车轮10对应的控制保持阀112e供给基于车轮摩擦制动力f
bfw
的励磁电流,在发生了锁定的情况下,在s59中,设为不供给励磁电流。进而,在s60中,制动ecu116基于来自统一驱动ecu86的车轮速v
w
信息、车速v信息来判定右侧的车轮10是否发生了锁定。在未发生锁定的情况下,在s61中,向与右侧的车轮10对应的控制保持阀112e供给基于车轮摩擦制动力f
bfw
的励磁电流,在发生了锁定的情况下,在s62中,设为不供给励磁电流。通过这样的处理,即使对左右的车轮10赋予了摩擦制动力f
bf
,在这些左右的车轮10中的任一个锁定时,所赋予的摩擦制动力f
bf
也会被解除。如此执行abs动作。
[0092]
顺便一说,在s51中判定为没有制动力的请求的情况下,在s63中,制动ecu116将工作液供给装置112的泵马达112d设为不工作(off)状态,结束由计算机进行的本程序的一次执行。
[0093]
本第二实施例的车辆通过采用液压制动系统来作为制动系统,提高了针对制动力产生部的可靠性。进一步而言,即使在该制动系统中发生了例如电气故障的情况下,也如前文说明过的,使通过由驾驶员施加于制动踏板94的操作力而被加压后的工作液供给至车轮制动装置114,因此,从故障保护的观点出发该制动系统是优异的制动系统。
[0094]
[实施例3]
[0095]
如图12中示意性所示,第三实施例的车辆是具备仅驱动后轮10r的驱动系统的车辆也就是后轮驱动车辆。第三实施例的车辆采用了仅针对后轮10r设有第一实施例的车辆中采用的后轮驱动装置12r的驱动系统。换言之,能考虑相对于第一实施例的车辆取消了前轮驱动装置12f的车辆。
[0096]
对与第一实施例的车辆相同的构成要素标注相同的附图标记,由此省略了对第三实施例的车辆的构成进行说明。第三实施例中与驱动力、制动力有关的控制与第一实施例的车辆中的控制相同,因此省略其说明。
[0097]
在第三实施例的车辆中,驱动系统被设为针对两个后轮10r分别设有两个车轮驱
动装置12,能对两个后轮10分别独立地赋予车轮驱动力、车轮再生制动力。此外,制动系统被设为针对两个前轮10f分别设有两个车轮制动装置14,能对两个前轮10f分别独立地赋予车轮摩擦制动力。需要说明的是,不针对前轮10f设置驱动马达22b,因此,针对左右的前轮10f分别设有车轮速传感器140以获取前轮10f的车轮速v
w
,并基于来自该车轮速传感器140的信号来进行有关前轮10f的锁定等的判定。
[0098]
第三实施例的车辆与第一实施例的车辆同样,仅在前轮和后轮中的一方设有摩擦制动装置,因此,该车辆整体中的制动力产生部在构造上的限制较小,此外,考虑到要获得较大的制动力这方面的优点,针对前轮10f而不是后轮10r设有摩擦制动装置。此外,在第三实施例的车辆中也被配置为车轮驱动装置12和车轮制动装置14均仅对一个车轮赋予再生制动力、摩擦制动力,因此,该车辆能按每个车轮10执行abs动作。进一步而言,第三实施例的车辆中,驱动系统仅针对两个后轮10分别设有两个车轮驱动装置12,因此,与第一实施例的车辆相比,具有结构更简单的驱动系统,车辆本身的结构也被简化。
[0099]
[实施例4]
[0100]
第四实施例的车辆与第三实施例的车辆同样,如图13中示意性所示,是具备仅驱动后轮10r的驱动系统的车辆也就是后轮驱动车辆。第四实施例的车辆采用了仅针对后轮10r设有第二实施例的车辆中采用的后轮驱动装置12r的驱动系统。换言之,能考虑相对于第二实施例的车辆取消了前轮驱动装置12f的车辆。
[0101]
对与第二实施例的车辆相同的构成要素标注相同的附图标记,由此省略了对第四实施例的车辆的构成进行说明。第四实施例中与驱动力、制动力有关的控制与第二实施例的车辆中的控制相同,因此省略其说明。
[0102]
在第四实施例的车辆中,驱动系统被设为针对两个后轮10r分别设有两个车轮驱动装置12,能对两个后轮10r分别独立地赋予车轮驱动力、车轮再生制动力。此外,制动系统被设为针对两个前轮10f设有液压式的制动装置,能对两个前轮10f分别独立地赋予车轮摩擦制动力。需要说明的是,与第三实施例的车辆同样,不针对前轮10f设置驱动马达22b,因此,针对左右的前轮10f分别设有车轮速传感器140以获取前轮10f的车轮速v
w
,并基于来自该车轮速传感器140的信号来进行有关前轮10f的锁定等的判定。
[0103]
第四实施例的车辆与第二实施例的车辆同样,仅在前轮和后轮中的一方设有摩擦制动装置,因此,该车辆整体的制动力产生部在构造上的限制较小,此外,考虑到要获得较大的制动力这方面的优点,针对前轮10f而不是后轮10r设有摩擦制动装置。此外,在第四实施例的车辆中也被配置为车轮驱动装置12和车轮制动装置14均仅对一个车轮独立地赋予再生制动力、摩擦制动力,因此,该车辆能按每个车轮10执行abs动作。进一步而言,在第四实施例的车辆中,驱动系统仅针对两个后轮10分别设有两个车轮驱动装置12,因此,与第二实施例的车辆相比,可以说具有结构更简单的驱动系统。
[0104]
此外,第四实施例的车辆与第二实施例的车辆同样采用了液压制动系统来作为制动系统。因此,与第二实施例的车辆同样提高了针对制动力产生部的可靠性。进一步而言,与第二实施例的车辆同样,即使在该制动系统中发生了例如电气故障的情况下,也如前文说明过的,使通过由驾驶员施加于制动踏板94的操作力而被加压后的工作液供给至车轮制动装置114,因此,从故障保护的观点出发该制动系统是优异的制动系统。
[0105]
[变形例]
[0106]
本发明的车辆不仅能实现为上述第一至第四实施例的车辆,也能实现为以下所示的若干变形例的车辆。下述各变形例的车辆的详细的构成、作用、效果能根据实施例的车辆中的说明充分地掌握,因此,针对下述各变形例的车辆,对与实施例的车辆相同的构成要素采用了相同的附图标记,仅限于概略构成的说明。
[0107]
如图14所示,第一变形例的车辆是具备分别针对前轮10f、后轮10r配设有前轮驱动装置12f、后轮驱动装置12r的驱动系统和仅针对后轮10r配设有电动式车轮制动装置14的制动系统的车辆。
[0108]
如图15所示,第二变形例的车辆是具备分别针对前轮10f、后轮10r配设有前轮驱动装置12f、后轮驱动装置12r的驱动系统和仅对后轮10r赋予制动力的液压式制动系统的车辆。
[0109]
如图16所示,第三变形例的车辆是具备仅针对前轮10f配设有前轮驱动装置12f的驱动系统和仅针对后轮10r配设有电动式车轮制动装置14的制动系统的车辆。
[0110]
如图17所示,第四变形例的车辆是具备仅针对前轮10f配设有前轮驱动装置12f的驱动系统和仅对后轮10r赋予制动力的液压式制动系统的车辆。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1