车辆控制装置的制作方法
1.本发明涉及车辆控制装置。
背景技术:
2.已知在车辆的车轮相对于路面的滑移率为特定的滑移率(以下为“最佳滑移率”)时车轮相对于路面的摩擦系数最大。因此,在对各车轮附加制动力来对车辆进行制动的情况下,为了缩短车辆的制动距离,优选以各车轮的滑移率不大幅超过最佳滑移率的方式控制附加于各车轮的制动力。
3.因此,已知有在对车辆进行制动的情况下进行以各车轮的滑移率不大幅超过最佳滑移率的方式控制附加于各车轮的制动力的制动力控制的车辆控制装置(例如,参照专利文献1)。在以往的车辆控制装置中,为了抑制车轮的滑移率大幅超过最佳滑移率而设定有滑移率的阈值。并且,以往的车辆控制装置在车轮的滑移率比该阈值大的情况下,重复进行附加于各车轮的制动力的增大和减小,由此车轮的滑移率不会大幅超过最佳滑移率。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2007-62520号公报
7.若在车轮的滑移率比阈值大的情况下单独地使附加于各车轮的制动力增减,则有时所有的车轮的速度会同时比实际的车身速度(即,车辆的车身相对于路面的移动速度)的降低大幅降低。
8.一般而言,各车轮的滑移率基于车身速度来计算,该车身速度基于各车轮速度(即,车轮相对于路面的移动速度)来计算。因此,若所有的车轮速度同时比实际的车身速度的降低大幅降低,则无法计算出准确的车身速度。如果无法计算出准确的车身速度,则无法计算出准确的滑移率,其结果是,无法以各车轮的滑移率不大幅超过最佳滑移率的方式高精度地控制附加于各车轮的制动力。在该情况下,车辆的制动距离会变长。因此,为了缩短车辆的制动距离,需要抑制所有的车轮速度同时比实际的车身速度的降低大幅降低。
技术实现要素:
9.本发明是为了应对上述问题而完成的。即,本发明的目的之一在于,提供一种能抑制在进行使附加于各车轮的制动力增减的控制时所有的车轮速度同时比实际的车身速度的降低大幅降低的车辆控制装置。
10.本发明的车辆控制装置应用于具备至少两个第一车轮和至少一个第二车轮的车辆。
11.本发明的车辆控制装置具备:制动装置,能对所述第一车轮和所述第二车轮分别独立地附加制动力;以及控制单元,对作为从所述制动装置附加至所述第一车轮的制动力的第一制动力和作为从所述制动装置附加至所述第二车轮的制动力的第二制动力进行控制。
12.所述控制单元基于所述第一车轮和所述第二车轮的至少一个车轮的速度来设定下限车轮速度,所述至少一个车轮的速度是在所述第一车轮和所述第二车轮各自与该第一车轮和第二车轮所接地的路面之间产生最大摩擦系数的速度。
13.并且,所述控制单元在对所述第一车轮和所述第二车轮附加制动力时所述第一车轮的速度和所述第二车轮的速度中的至少一个成为小于所述下限车轮速度的情况下,执行用于将所述第一车轮的速度和所述第二车轮的速度控制为所述下限车轮速度以上的车轮速度波动控制。
14.所述车轮速度波动控制是执行第一增减控制并且执行第二增减控制的控制,所述第一增减控制是交替地执行使所述第一制动力一起增大的第一增大控制和使所述第一制动力一起减小的第一减小控制的控制,所述第二增减控制是使所述第二制动力增大或减小的控制。
15.根据上述内容可以理解,在进行附加于各车轮的制动力的增减时所有的车轮速度同时比实际的车身速度的降低大幅降低的原因在于单独地使附加于各车轮的制动力增减。
16.根据第一个车辆控制装置,在车轮速度波动控制的执行中,第一制动力一起被增大且一起被减小。因此,在一方的第一制动力被增大时,另一方的第一制动力也被增大,此外,在一方的第一制动力被减小时,另一方的第一制动力也被减小。即,第一制动力未单独地被增减。因此,与第一制动力单独地被增减的情况相比,第一车轮的速度同时比实际的车身速度的降低大幅降低的可能性低。因此,会抑制所有的车轮的速度同时比实际的车身速度的降低大幅降低。
17.在本发明的车辆控制装置中,所述第二车轮例如包括两个车轮。在该情况下,所述第二增减控制例如是交替地执行使所述第二制动力一起增大的第二增大控制和使所述第二制动力一起减小的第二减小控制的控制。
18.由此,在车轮速度波动控制的执行中,第二制动力一起被增大且一起被减小。即,第二制动力未单独地被增减。因此,与第二制动力单独地被增减的情况相比,第二车轮的速度同时比实际的车身速度的降低大幅降低的可能性低。因此,会抑制所有的车轮的速度同时比实际的车身速度的降低大幅降低。
19.本发明的车辆控制装置应用于具备至少两个第一车轮和至少一个第二车轮的车辆。
20.本发明的车辆控制装置具备:制动装置,能对所述第一车轮和所述第二车轮分别独立地附加制动力;以及控制单元,对作为从所述制动装置附加至所述第一车轮的制动力的第一制动力和作为从所述制动装置附加至所述第二车轮的制动力的第二制动力进行控制。
21.所述控制单元基于所述第一车轮和所述第二车轮的至少一个车轮的速度来设定下限车轮速度,所述至少一个车轮的速度是在所述第一车轮和所述第二车轮各自与该第一车轮和第二车轮所接地的路面之间产生最大摩擦系数的速度。
22.并且,所述控制单元在对所述第一车轮和所述第二车轮附加制动力时所述第一车轮的速度和所述第二车轮的速度中的至少一个成为小于所述下限车轮速度的情况下,执行用于将所述第一车轮的速度和所述第二车轮的速度控制为所述下限车轮速度以上的车轮速度波动控制。
23.所述车轮速度波动控制是在使所述第一制动力的至少一个增大的第一期间的至少一部分使所述第二制动力减小,并在使所述第二制动力增大的第二期间的至少一部分使所述第一制动力的至少一个减小的控制。
24.如上所述,为了缩短车辆的制动距离,需要抑制所有的车轮的速度同时比实际的车身速度的降低大幅降低。
25.根据第二个车辆控制装置,在第一制动力被增大时,第二制动力被减小。因此,即使第一车轮的速度降低,第二车轮的速度降低的可能性也极低。同样地,根据第二个车辆控制装置,在第二制动力被增大时,第一制动力被减小。因此,即使第二车轮的速度降低,第一车轮的速度降低的可能性也极低。因此,会抑制所有的车轮的速度同时比实际的车身速度的降低大幅降低。
26.此外,所述车轮速度波动控制例如是执行第一增减控制并且执行第二增减控制的控制,所述第一增减控制是交替地执行使所述第一制动力增大的第一增大控制和使所述第一制动力减小的第一减小控制的控制,所述第二增减控制是交替地执行使所述第二制动力增大的第二增大控制和使所述第二制动力减小的第二减小控制的控制。
27.此外,所述车轮速度波动控制例如是执行使所述第一制动力增大的第一增大控制、使所述第一制动力减小的第一减小控制、使所述第二制动力增大的第二增大控制以及使所述第二制动力减小的第二减小控制的控制。
28.此外,本发明的车辆控制装置应用于具备至少一个前轮和至少一个后轮的车辆。
29.本发明的车辆控制装置具备:制动装置,能对所述前轮和所述后轮分别独立地附加制动力;以及控制单元,对作为从所述制动装置附加至所述前轮的制动力的前轮制动力和作为从所述制动装置附加至所述后轮的制动力的后轮制动力进行控制。
30.所述控制单元基于所述前轮和所述后轮的至少一个车轮的速度来设定下限车轮速度,所述至少一个车轮的速度是在所述前轮和所述后轮各自与该前轮和后轮所接地的路面之间产生最大摩擦系数的速度。
31.并且,所述控制单元在对所述前轮和所述后轮附加制动力时所述前轮的速度和所述后轮的速度中的至少一个成为小于所述下限车轮速度的情况下,执行用于将所述前轮的速度和所述后轮的速度控制为所述下限车轮速度以上的车轮速度波动控制。
32.所述车轮速度波动控制是如下控制:在对所述前轮和所述后轮附加制动力时所述前轮的速度成为小于所述下限车轮速度的情况下,执行使所述前轮制动力减小的第一减小控制,在所述第一减小控制的执行中所述前轮的速度成为被设定为比所述下限车轮速度大的值的恢复判定阈值以上的情况下,执行使所述前轮制动力增大的第一增大控制,在对所述前轮和所述后轮附加制动力时所述后轮的速度成为小于所述下限车轮速度的情况下,执行使所述后轮制动力减小的第二减小控制,在所述第二减小控制的执行中所述后轮的速度成为所述恢复判定阈值以上的情况下,执行使所述后轮制动力增大的第二增大控制。
33.根据第三个车辆控制装置,总的来说,在前轮制动力被增大时后轮制动力被减小,在前轮制动力被减小时后轮制动力被增大。因此,在车轮速度波动控制的执行中,车辆的载荷在车辆的前部与后部之间移动。因此,在前轮的速度与后轮的速度之间,达到下限车轮速度的定时和达到恢复判定阈值的定时不同的概率变高。这意味着所有的车轮的速度不会同时比实际的车身速度的降低大幅降低。因此,会抑制所有的车轮速度同时比实际的车身速
度的降低大幅降低。
34.在本发明的车辆控制装置中,例如,所述车辆具备左前轮、右前轮、左后轮以及右后轮,所述第一车轮是所述左前轮和所述右前轮,所述第二车轮是所述左后轮和所述右后轮。
35.此外,例如,所述车辆具备左前轮、右前轮、左后轮以及右后轮,所述第一车轮是所述左前轮和所述左后轮,所述第二车轮是所述右前轮和所述右后轮。
36.此外,也可以是,所述控制单元被配置为:在所述车轮速度波动控制的执行中所述第一车轮的速度和所述第二车轮的速度成为所述下限车轮速度以上的情况下,停止所述车轮速度波动控制。
37.此外,也可以是,所述控制单元被配置为:在所述车轮速度波动控制的执行中所述第一车轮的速度和所述第二车轮的速度成为所述下限车轮速度以上的状态持续了规定时间的情况下,停止所述车轮速度波动控制。
38.此外,也可以是,所述控制单元被配置为:在所述第一增大控制的执行中所述第一车轮的速度成为被设定为比所述下限车轮速度大的值的恢复判定阈值以上的情况下,停止所述车轮速度波动控制,在使所述第二制动力增大时所述第二车轮的速度成为所述恢复判定阈值以上的情况下,停止所述车轮速度波动控制。
39.此外,也可以是,所述控制单元被配置为:在所述第一增大控制的执行中所述第一车轮的速度成为被设定为比所述下限车轮速度大的值的恢复判定阈值以上的状态持续了规定的第一时间的情况下,停止所述车轮速度波动控制,在使所述第二制动力增大时所述第二车轮的速度成为所述恢复判定阈值以上的状态持续了规定的第二时间的情况下,停止所述车轮速度波动控制。
40.此外,所述下限车轮速度例如是比在所述第一车轮和所述第二车轮各自与所述路面之间产生所述最大摩擦系数的所述第一车轮和所述第二车轮的至少一个车轮的速度小的速度,是所述第一车轮和所述第二车轮各自与所述路面之间的摩擦系数成为容许范围的下限值的所述至少一个车轮的速度。
41.此外,也可以是,所述控制单元被配置为:基于所述车辆的车身的速度来设定所述下限车轮速度,所述车辆的车身的速度是基于所述第一车轮和所述第二车轮的至少一个车轮的速度来获取的。
42.本发明的构成要素并不限定于参照附图在后文叙述的本发明的实施方式。本发明的其他目的、其他特征以及附带的优点根据对本发明的实施方式的说明而容易被理解。
附图说明
43.图1是表示本发明的实施方式的车辆控制装置和应用该车辆控制装置的车辆的图。
44.图2是表示图1所示的车辆的图。
45.图3的(a)是表示第一增减控制被执行时的前轮制动力的变化的图,图3的(b)是表示第二增减控制被执行时的后轮制动力的变化的图。
46.图4是表示通常制动控制和车轮速度恢复控制被执行时的车轮速度和制动力的变化的图。
47.图5是表示本发明的实施方式的车辆控制装置所执行的例程的流程图。
48.图6是表示本发明的实施方式的车辆控制装置所执行的例程的流程图。
49.图7是表示本发明的实施方式的车辆控制装置所执行的例程的流程图。
50.图8是表示本发明的实施方式的第一变形例的通常制动控制和车轮速度恢复控制被执行时的车轮速度和制动力的变化的图。
51.图9是表示本发明的实施方式的第一变形例的车辆控制装置所执行的例程的流程图。
52.图10是表示本发明的实施方式的第一变形例的车辆控制装置所执行的例程的流程图。
53.图11是表示本发明的实施方式的第二变形例的通常制动控制和车轮速度恢复控制被执行时的车轮速度、制动力以及车辆载荷的变化的图。
54.附图标记说明
55.10:车辆控制装置;20:驱动装置;21:加速踏板;30:制动装置;31:制动踏板;71:加速踏板操作量传感器;72:制动踏板操作量传感器;80:车轮速度传感器;81:左前轮速度传感器;82:右前轮速度传感器;83:左后轮速度传感器;84:右后轮速度传感器;90:ecu;100:车辆;100fl:左前轮;100fr:右前轮;100rl:左后轮;100rr:右后轮。
具体实施方式
56.以下,参照附图对本发明的实施方式的车辆控制装置10进行说明。如图1所示,本发明的实施方式的车辆控制装置10搭载于车辆100。
57.如图2所示,车辆100具备左前轮100fl、右前轮100fr、左后轮100rl以及右后轮100rr这四个车轮。在本例子中,左前轮100fl和右前轮100fr是转向轮并且是驱动轮。在以下的说明中,将左前轮100fl和右前轮100fr这两个统称为“前轮100f”,将左后轮100rl和右后轮100rr这两个统称为“后轮100r”。此外,将左前轮100fl、右前轮100fr、左后轮100rl以及右后轮100rr这四个统称为“车轮100w”。
58.如图1所示,在车辆100也搭载有驱动装置20和制动装置30。
59.驱动装置20为了使车辆100行驶而产生附加于车辆100的驱动轮(即,左前轮100fl和右前轮100fr)的转矩tqdriver。在本例子中,驱动装置20是马达,但也可以是内燃机,还可以是马达和内燃机。以下,将从驱动装置20附加至车辆100的驱动轮的转矩tqdriver称为“驱动转矩tqdriver”。
60.制动装置30为了对车辆100进行制动而产生施加于车辆100的各车轮(即,左前轮100fl、右前轮100fr、左后轮100rl以及右后轮100rr)的制动转矩tqbrake。
61.在以下的说明中,“左前轮制动力bfl”是附加于左前轮100fl的制动力b,“右前轮制动力bfr”是附加于右前轮100fr的制动力b,“左后轮制动力brl”是附加于左后轮100rl的制动力b,“右后轮制动力brr”是附加于右后轮100rr的制动力b。
62.此外,在以下的说明中,“前轮制动力bf”是左前轮制动力bfl和右前轮制动力bfr,“后轮制动力br”是左后轮制动力brl和右后轮制动力brr。此外,“所有的制动力b”是左前轮制动力bfl、右前轮制动力bfr、左后轮制动力brl以及右后轮制动力brr。“各制动力b”分别是左前轮制动力bfl、右前轮制动力bfr、左后轮制动力brl以及右后轮制动力brr。
63.车辆控制装置10具备ecu(electronic control unit:电子控制单元)90。ecu90具备cpu(central processing unit:中央处理器)、rom(read only memory:只读存储器)、ram(random access memory:随机存取存储器)以及接口。
64.驱动装置20和制动装置30电连接于ecu90。ecu90能通过控制驱动装置20的工作状态来控制驱动装置20所产生的驱动转矩tqdriver。此外,ecu90能通过控制制动装置30的工作状态来控制制动装置30所产生的制动转矩tqbrake。
65.以下,将通过附加于左前轮100fl、右前轮100fr、左后轮100rl以及右后轮100rr的制动转矩tqbrake而附加于左前轮100fl、右前轮100fr、左后轮100rl以及右后轮100rr的制动力分别称为“左前轮制动力bfl、右前轮制动力bfr、左后轮制动力brl以及右后轮制动力brr”。此外,将左前轮制动力bfl和右前轮制动力bfr这两个统称为“前轮制动力bf”,将左后轮制动力brl和右后轮制动力brr这两个统称为“后轮制动力br”。此外,将左前轮制动力bfl、右前轮制动力bfr、左后轮制动力brl以及右后轮制动力brr这四个统称为“制动力b”。
66.而且,在车辆100搭载有加速踏板操作量传感器71、制动踏板操作量传感器72以及车轮速度传感器80。该加速踏板操作量传感器71、制动踏板操作量传感器72以及车轮速度传感器80电连接于ecu90。
67.加速踏板操作量传感器71检测车辆100的加速踏板21的操作量,并将表示检测到的操作量的信号发送至ecu90。ecu90基于该信号获取加速踏板21的操作量来作为加速踏板操作量ap,并基于获取到的加速踏板操作量ap来控制驱动装置20的工作状态。
68.制动踏板操作量传感器72检测车辆100的制动踏板31的操作量,并将表示检测到的操作量的信号发送至ecu90。ecu90基于该信号获取制动踏板31的操作量来作为制动踏板操作量bp,并基于获取到的制动踏板操作量bp来控制制动装置30的工作状态。
69.车轮速度传感器80包括左前轮速度传感器81、右前轮速度传感器82、左后轮速度传感器83以及右后轮速度传感器84。
70.左前轮速度传感器81每当车辆100的左前轮100fl旋转规定角度时将脉冲信号发送至ecu90。ecu90基于该脉冲信号获取左前轮100fl的转速来作为左前轮转速vrfl。
71.右前轮速度传感器82每当车辆100的右前轮100fr旋转规定角度时将脉冲信号发送至ecu90。ecu90基于该脉冲信号获取右前轮100fr的转速来作为右前轮转速vrfr。
72.左后轮速度传感器83每当车辆100的左后轮100rl旋转规定角度时将脉冲信号发送至ecu90。ecu90基于该脉冲信号获取左后轮100rl的转速来作为左后轮转速vrrl。
73.右后轮速度传感器84每当车辆100的右后轮100rr旋转规定角度时将脉冲信号发送至ecu90。ecu90基于该脉冲信号获取右后轮100rr的转速来作为右后轮转速vrrr。
74.ecu90将获取到的左前轮转速vrfl、右前轮转速vrfr、左后轮转速vrrl以及右后轮转速vrrr分别换算为各车轮100w相对于路面的移动速度。
75.以下,将换算得到的左前轮100fl、右前轮100fr、左后轮100rl以及右后轮100rr相对于路面的移动速度分别称为“左前轮速度vfl、右前轮速度vfr、左后轮速度vrl以及右后轮速度vrr”。此外,将左前轮速度vfl和右前轮速度vfr这两个统称为“前轮速度vf”,将左后轮速度vrl和右后轮速度vrr这两个统称为“后轮速度vr”。此外,将左前轮速度vfl、右前轮速度vfr、左后轮速度vrl以及右后轮速度vrr这四个统称为“车轮速度v”。
76.而且,ecu90获取对获取到的左前轮速度vfl、右前轮速度vfr、左后轮速度vrl以及
右后轮速度vrr这四个速度中的最快的车轮速度v乘以规定系数k而得到的值来作为车身速度v100。
77.车身速度v100是车辆100的车身相对于路面的移动速度。此外,规定系数k是作为在考虑了车轮相对于路面滑移的量(所谓的滑移率)等时能将四个车轮速度中的最快的车轮速度变换为更接近实际的车身速度的速度的系数的、预先通过实验等得到的系数。
78.<工作的概要>
79.接着,对车辆控制装置10的工作的概要进行说明。
80.当判定为制动踏板31被驾驶员操作时,车辆控制装置10开始通常制动控制。车辆控制装置10在制动踏板操作量bp比零大的情况下,判定为制动踏板31被驾驶员操作。
81.通常制动控制是使前轮制动力bf以规定的增大率run1一起增大并且使后轮制动力br以规定的增大率run2一起增大来将各制动力b分别控制为对应的目标值btgt的控制。在本例子中,规定的增大率run1被设定为比规定的增大率run2大的值。然而,该规定的增大率run1与规定的增大率run2的大小的关系不限定于本例子中的大小的关系。
82.车辆控制装置10在通常制动控制的执行中如以下这样计算出各制动力b的目标值btgt。车辆控制装置10基于制动踏板操作量bp计算出应附加于车辆100的总的制动力b来作为“目标总制动力btotal”。
83.车辆控制装置10将计算出的目标总制动力btotal以规定的分配率分配为“应附加于前轮100f的总的前轮制动力bftotal”和“应附加于后轮100r的总的后轮制动力brtotal”。在本例子中,上述规定的分配率被设定为总的前轮制动力bftotal比总的后轮制动力brtotal更大。然而,该规定的分配率不限定于本例子中的规定分配率。
84.进而,车辆控制装置10将应附加于前轮100f的总的前轮制动力bftotal的二分之一的值分别设定为“左前轮制动力bfl和右前轮制动力bfr的目标值btgt”。同样地,车辆控制装置10将应附加于后轮100r的总的后轮制动力brtotal的二分之一的值分别设定为“左后轮制动力brl和右后轮制动力brr的目标值btgt”。
85.再者,已知在车轮相对于路面的滑移率为特定的滑移率(例如为10%至20%之间的滑移率,以下称为“最佳滑移率slopt”)时车轮相对于路面的摩擦系数μ最大。因此,在为了对车辆100进行制动而增大了制动力的情况下,存在前轮速度和后轮速度一起降低的倾向,其结果是,存在各车轮100w的滑移率变大的倾向,但为了缩短车辆100的制动距离,优选以各车轮100w的滑移率不大幅超过最佳滑移率slopt的方式控制各制动力b。
86.因此,车辆控制装置10在通常制动控制的执行中监视车轮速度v是否分别为下限车轮速度vref以上。下限车轮速度vref是比车轮相对于路面的滑移率sl成为最佳滑移率slopt时的车轮速度大的速度,是能使车辆的制动距离成为可容许的范围的距离的车轮速度的下限值。以下,将各车轮100w相对于路面的滑移率sl简称为“滑移率sl”。
87.车辆控制装置10如以下这样计算出下限车轮速度vref。在本例子中,滑移率sl由“滑移率sl=(车身速度v100-车轮速度v)/(车身速度v100)”定义。此外,在本例子中,上限滑移率sllimit被预先设定。上限滑移率sllimit是比最佳滑移率slopt大的滑移率sl,是能使车辆的制动距离成为可容许的范围的距离的滑移率sl的上限值。因此,车辆控制装置10根据“下限车轮速度vref=车身速度v100-(上限滑移率sllimit
×
车身速度v100)”的关系来计算出下限车轮速度vref。
88.只要所有的车轮速度v为下限车轮速度vref以上,车辆控制装置10就持续通常制动控制的执行。另一方面,当车轮速度v中的任一个成为小于下限车轮速度vref时,车辆控制装置10停止通常制动控制,并开始车轮速度恢复控制。车轮速度恢复控制包括初期前轮减小控制、初期后轮减小控制以及车轮速度波动控制。
89.<初期前轮减小控制/初期后轮减小控制>
90.初期前轮减小控制是在规定时间td0_th的期间使前轮制动力bf(即,左前轮制动力bfl和右前轮制动力bfr)以规定的减小率rd1一起减小的控制。此外,初期后轮减小控制是在规定时间td0_th的期间使后轮制动力br(即,左后轮制动力brl和右后轮制动力brr)以规定的减小率rd2一起减小的控制。以下,将初期前轮减小控制用的减小率rd1称为“第一减小率rd1”,将初期后轮减小控制用的减小率rd2称为“第二减小率rd2”。在本例子中,第一减小率rd1被设定为比第二减小率rd2大的值。然而,该第一减小率rd1与第二减小率rd2的大小的关系不限定于本例子中的大小的关系。
91.<车轮速度波动控制>
92.车轮速度波动控制包括后轮维持控制、第一增减控制以及第二增减控制。
93.<后轮维持控制>
94.后轮维持控制是将后轮制动力br一起维持为后轮维持控制的开始时间点的后轮制动力br的控制。
95.<第一增减控制>
96.第一增减控制是如下控制:如图3的(a)所示,首先,进行使前轮制动力bf在规定时间tu12的期间以规定的增大率ru1一起增大的第一增大控制,之后,进行使前轮制动力bf在规定时间td12的期间以第一减小率rd1一起减小的第一减小控制。以下,将第一增大控制用的增大率ru1称为“第一增大率ru1”。此外,将规定时间tu12称为“规定增大时间tu12”,将规定时间td12称为“规定减小时间td12”。
97.在本例子中,在第一增减控制的执行中,左前轮制动力bfl与右前轮制动力bfr彼此相等的状态被保持。然而,第一增减控制的执行中的左前轮制动力bfl与右前轮制动力bfr的关系不限定于本例子中的关系。
98.此外,在本例子中,规定增大时间tu12被设定为比规定减小时间td12短的时间。然而,该规定增大时间tu12与规定减小时间td12的长短的关系不限定于本例子中的长短的关系。
99.此外,在本例子中,第一增大率ru1被设定为比第一减小率rd1小的值。然而,该第一增大率ru1与第一减小率rd1的大小的关系不限定于本例子中的大小的关系。
100.<第二增减控制>
101.第二增减控制是如下控制:如图3的(b)所示,首先,进行使后轮制动力br在规定增大时间tu12的期间以规定的增大率ru2一起增大的第二增大控制,之后,进行使后轮制动力br在规定减小时间td12的期间以第二减小率rd2一起减小的第二减小控制。以下,将第二增大控制用的增大率ru2称为“第二增大率ru2”。
102.在本例子中,在第二增减控制的执行中,左后轮制动力brl与右后轮制动力brr彼此相等的状态被保持。然而,第二增减控制的执行中的左后轮制动力brl与右后轮制动力brr的关系不限定于本例子中的关系。
103.此外,在本例子中,第二增大率ru2被设定为比第二减小率rd2小的值。然而,该第二增大率ru2与第二减小率rd2的大小的关系不限定于本例子中的大小的关系。
104.此外,在本例子中,第二增大率ru2被设定为比第一增大率ru1小的值。然而,该第二增大率ru2与第一增大率ru1的大小关系不限定于本例子中的大小的关系。
105.此外,在本例子中,第二减小率rd2被设定为比第一减小率rd1小的值。然而,该第二减小率rd2与第一减小率rd1的大小的关系不限定于本例子中的大小的关系。
106.当开始车轮速度恢复控制时,车辆控制装置10首先开始初期前轮减小控制和初期后轮减小控制。由此,前轮制动力bf一起被减小,并且后轮制动力br一起被减小。其结果是,前轮速度vf和后轮速度vr一起上升。
107.车辆控制装置10持续初期前轮减小控制和初期后轮减小控制的执行,直到从该初期前轮减小控制和初期后轮减小控制的开始时间点起经过的时间td0达到规定时间td0_th为止。以下,将从开始初期前轮减小控制和初期后轮减小控制起经过的时间td0称为“减小时间td0”。
108.当减小时间td0达到规定时间td0_th时,车辆控制装置10停止初期前轮减小控制和初期后轮减小控制,并开始车轮速度波动控制。当开始车轮速度波动控制时,车辆控制装置10开始第一增减控制和后轮维持控制。由此,前轮制动力bf一起被增大,之后,在从经过规定增大时间tu12的时间点起到经过规定减小时间td12为止的期间,前轮制动力bf一起被减小。其结果是,前轮速度vf一起降低,之后,一起上升。此外,后轮制动力br一起被维持为后轮维持控制的开始时间点的后轮制动力br。其结果是,后轮速度vr一起持续上升。
109.只要规定停止条件不成立,车辆控制装置10就重复执行第一增减控制。因此,车辆控制装置10以规定周期cy(=规定增大时间tu12+规定减小时间td12)重复执行第一增减控制。此处的规定停止条件在车轮速度波动控制的执行中所有的车轮速度v为下限车轮速度vref以上的状态持续了规定时间tg0_th的期间的情况下成立。在本例子中,规定时间tg0_th被设定为比规定周期cy长的时间。以下,将在车轮速度波动控制的执行中所有的车轮速度v成为下限车轮速度vref以上的状态所持续的时间称为“速度恢复时间tg0”。
110.进而,车辆控制装置10在从第一增减控制的开始时间点起经过了半周期时间tcyh的时间点停止后轮维持控制,并开始第二增减控制。半周期时间tcyh是相当于规定周期cy的一半的周期cyh的时间。以下,将规定周期cy的一半的周期cyh称为“半周期cyh”。当开始第二增减控制时,首先,后轮制动力br一起被增大,在从经过规定增大时间tu12的时间点起到经过规定减小时间td12为止的期间,后轮制动力br一起被减小。其结果是,后轮速度vr在降低之后上升。
111.只要规定停止条件不成立,车辆控制装置10就重复执行第二增减控制。因此,车辆控制装置10以规定周期cy(=规定增大时间tu12+规定减小时间td12)重复执行第二增减控制。
112.如此,在直到规定停止条件成立为止的期间,车辆控制装置10以每次错开半周期cyh的方式重复执行第一增减控制和第二增减控制。
113.车辆控制装置10在规定停止条件成立的情况下,停止车轮速度恢复控制,并再次开始通常制动控制。
114.需要说明的是,车辆控制装置10在速度恢复时间tg0达到规定时间tg0_th之前车
轮速度v中的任一个成为小于下限车轮速度vref的情况下,清除速度恢复时间tg0。此外,车辆控制装置10在停止了车轮速度恢复控制的情况下也清除速度恢复时间tg0。
115.在车轮速度恢复控制被执行的情况下,例如,如图4所示,制动力b被控制,车轮速度v发生变化。在图4中,前轮制动力bf和前轮速度vf以实线表示,后轮制动力br和后轮速度vr以点划线表示。
116.在图4所示的例子中,在时刻t40,开始通常制动控制。由此,前轮制动力bf和后轮制动力br一起被增大。其结果是,前轮速度vf和后轮速度vr一起降低。
117.之后,在时刻t41,前轮速度vf和后轮速度vr降低至下限车轮速度vref。因此,在时刻t41,开始初期前轮减小控制和初期后轮减小控制。由此,前轮制动力bf和后轮制动力br一起被减小。其结果是,前轮速度vf和后轮速度vr在低于下限车轮速度vref之后一起上升。
118.之后,在时刻t42,前轮速度vf和后轮速度vr达到下限车轮速度vref。因此,在时刻t42,开始车轮速度波动控制。当开始车轮速度波动控制时,开始第一增减控制的第一增大控制和后轮维持控制。由此,前轮制动力bf被增大,后轮制动力br被维持。其结果是,前轮速度vf在高于下限车轮速度vref之后降低。另一方面,后轮速度vr在持续上升之后随着车身速度的降低而降低。
119.之后,在时刻t43,从时刻t42的第一增大控制的开始起经过半周期时间tcyh。因此,在时刻t43,开始第二增减控制的第二增大控制。由此,后轮制动力br被增大。其结果是,后轮速度vr降低。此时,继续进行第一增大控制,因此,前轮速度vf持续降低,在图4所示的例子中,前轮速度vf低于下限车轮速度vref。
120.之后,在时刻t44,开始第一增减控制的第一减小控制。由此,前轮制动力bf被减小。其结果是,前轮速度vf上升,在图4所示的例子中,前轮速度vf高于下限车轮速度vref。此时,继续进行第二增大控制,因此后轮速度vr持续降低。
121.之后,在时刻t45,开始第一增大控制。由此,前轮制动力bf被增大。其结果是,前轮速度vf稍微上升之后又降低。此时,继续进行第二增大控制,因此后轮速度vr持续降低。
122.之后,在时刻t46,开始第二减小控制。由此,后轮制动力br被减小。其结果是,后轮速度vr上升。此时,继续进行第一增大控制,因此前轮速度vf持续降低。
123.之后,在时刻t47,开始第二增大控制。由此,后轮制动力br被增大。其结果是,后轮速度vr稍微上升之后又降低。此时,继续进行第一增大控制,因此前轮速度vf持续降低。
124.之后,以每次错开半周期cyh的方式重复执行第一增减控制和第二增减控制,直到规定停止条件成立为止。
125.<效果>
126.存在对于缩短车辆的制动距离而言适当的车轮速度(在本例子中为下限车轮速度vref)。若为了使在车辆的制动中成为小于适当的车轮速度的车轮速度返回至适当的车轮速度而单独地增减附加于各车轮的制动力,则有时所有的车轮速度会同时比实际的车身速度的降低大幅降低。在该情况下,无法获取到准确的车身速度,因此,使各车轮速度返回至适当的车轮速度需要花费时间,其结果是,车辆100的制动距离会变长。因此,为了缩短车辆的制动距离,抑制所有的车轮速度同时比实际的车身速度的降低大幅降低即可。
127.根据上述内容可以理解,所有的车轮速度同时比实际的车身速度的降低大幅降低的原因在于单独地使附加于各车轮的制动力增减。
128.根据车辆控制装置10,在车轮速度波动控制的执行中,前轮制动力bf一起被增大且一起被减小。因此,在前轮制动力bf的一方被增大时,前轮制动力bf的另一方也被增大,此外,在前轮制动力bf的一方被减小时,前轮制动力bf的另一方也被减小。即,前轮制动力bf未单独地被增减。因此,前轮速度的两方同时比实际的车身速度的降低大幅降低的可能性低。因此,会抑制所有的车轮速度同时比实际的车身速度的降低大幅降低。
129.同样地,根据车辆控制装置10,在车轮速度波动控制的执行中,后轮制动力br一起被增大且一起被减小。因此,在后轮制动力br的一方被增大时,后轮制动力br的另一方也被增大,此外,在后轮制动力br的一方被减小时,后轮制动力br的另一方也被减小。即,后轮制动力br未单独地被增减。因此,后轮速度的两方同时比实际的车身速度的降低大幅降低的可能性低。因此,会抑制所有的车轮速度同时比实际的车身速度的降低大幅降低。
130.而且,根据车辆控制装置10,在第一增减控制和第二增减控制的执行中,在前轮制动力bf被增大时,总体来说,后轮制动力br被减小,反之,在后轮制动力br被增大时,总体来说,前轮制动力bf被减小。因此,即使前轮速度vf降低,后轮速度vr也上升,反之,即使后轮速度vr降低,前轮速度vf也上升。因此,会抑制所有的车轮速度同时比实际的车身速度的降低大幅降低。
131.需要说明的是,在本例子中,车辆控制装置10在减小时间td0达到规定时间td0_th的时间点开始第一增减控制和后轮维持控制,在从该开始时间点起经过了半周期时间tcyh的时间点停止后轮维持控制,并开始第二增减控制,之后,只要规定停止条件不成立,就以每次错开半周期cyh的方式重复执行第一增减控制和第二增减控制。
132.然而,车辆控制装置10也可以被配置为:在减小时间td0达到规定时间td0_th的时间点开始第二增减控制和前轮维持控制,在从该开始时间点起经过了半周期时间tcyh的时间点停止前轮维持控制,并开始第一增减控制,之后,只要规定停止条件不成立,就以每次错开半周期cyh的方式重复执行第一增减控制和第二增减控制。需要说明的是,前轮维持控制是将前轮制动力bf一起维持为该前轮维持控制的开始时间点的前轮制动力bf的控制。
133.此外,车辆控制装置10也可以被配置为:在减小时间td0达到规定时间td0_th的时间点,根据该时间点的各车轮速度v的状况来决定是开始第一增减控制和后轮维持控制还是开始第二增减控制和前轮维持控制。
134.此外,在通常制动控制的执行中,由驾驶员进行的制动踏板31的操作被解除的情况下,车辆控制装置10停止通常制动控制。此外,在车轮速度恢复控制的执行中,由驾驶员进行的制动踏板31的操作被解除的情况下,车辆控制装置10停止车轮速度恢复控制。
135.此外,车辆控制装置10也可以被配置为:对左前轮制动力bfl和左后轮制动力brl执行第一增减控制,对右前轮制动力bfr和右后轮制动力brr执行第二增减控制。
136.该情况下的第一增减控制是如下控制:首先,进行使左前轮制动力bfl和左后轮制动力brl在规定增大时间tu12的期间以第一增大率ru1一起增大的第一增大控制,之后,进行使左前轮制动力bfl和左后轮制动力brl在规定减小时间td12的期间以第一减小率rd1一起减小的第一减小控制。
137.此外,第二增减控制是如下控制:首先,进行使右前轮制动力bfr和右后轮制动力brr在规定增大时间tu12的期间以第二增大率ru2一起增大的第二增大控制,之后,进行使右前轮制动力bfr和右后轮制动力brr在规定减小时间td12的期间以第二减小率rd2一起减
小的第二减小控制。
138.此外,在该情况下,车辆控制装置10被配置为执行以下的维持控制来代替后轮维持控制。即,车辆控制装置10被配置为:执行分别将右前轮制动力bfr和右后轮制动力brr一起维持为该维持控制的开始时间点的右前轮制动力bfr和右后轮制动力brr的维持控制。
139.<具体的工作>
140.接着,对车辆控制装置10的具体的工作进行说明。车辆控制装置10的ecu90的cpu每经过规定时间tc就执行图5所示的例程。
141.因此,当成为规定的定时时,cpu从图5的步骤500开始处理,并使该处理进入步骤505,判定制动踏板操作量bp是否比零大。
142.cpu在步骤505中判定为“是”的情况下,使处理进入步骤510,计算出下限车轮速度vref。接着,cpu使处理进入步骤515,判定车轮速度恢复控制标志xg的值是否为“0”。车轮速度恢复控制标志xg的值在车轮速度恢复控制开始时被设定为“1”,在车轮速度恢复控制停止时被设定为“0”。
143.cpu在步骤515中判定为“是”的情况下,使处理进入步骤520,判定前轮速度vf是否为下限车轮速度vref以上。
144.cpu在步骤520中判定为“是”的情况下,使处理进入步骤525,判定后轮速度vr是否为下限车轮速度vref以上。
145.cpu在步骤525中判定为“是”的情况下,使处理进入步骤530,执行先前所述的通常制动控制。接着,cpu使处理进入步骤595,暂时结束本例程。
146.另一方面,cpu在步骤515中判定为“否”的情况下以及在步骤520中判定为“否”的情况下以及在步骤525中判定为“否”的情况下,使处理进入步骤535,执行先前所述的车轮速度恢复控制。车轮速度恢复控制通过执行图6所示的例程来执行。
147.因此,当使处理进入步骤535时,cpu从图6的步骤600开始处理,并使该处理进入步骤605,将车轮速度恢复控制标志xg的值设定为“1”。由此,在图5的步骤515中判定为“否”。接着,cpu使处理进入步骤610,判定减小时间td0是否比规定时间td0_th短。
148.cpu在步骤610中判定为“是”的情况下,使处理进入步骤615,执行先前所述的初期前轮减小控制和初期后轮减小控制。接着,cpu经由步骤695使处理进入图5的步骤595,暂时结束本例程。
149.另一方面,cpu在步骤610中判定为“否”的情况下,使处理进入步骤620,停止初期前轮减小控制和初期后轮减小控制。接着,cpu使处理进入步骤625,执行先前所述的车轮速度波动控制。车轮速度波动控制通过执行图7所示的例程来执行。
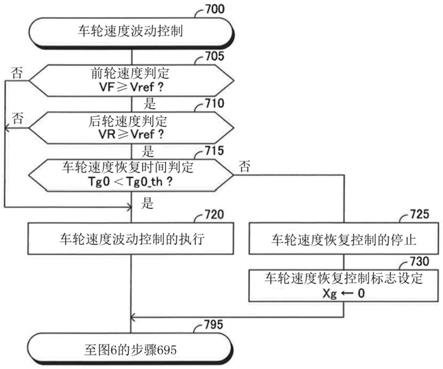
150.因此,当使处理进入步骤625时,cpu从图7的步骤700开始处理,并使该处理进入步骤705,判定前轮速度vf是否为下限车轮速度vref以上。
151.cpu在步骤705中判定为“是”的情况下,使处理进入步骤710,判定后轮速度vr是否为下限车轮速度vref以上。
152.cpu在步骤710中判定为“是”的情况下,使处理进入步骤715,判定速度恢复时间tg0是否比规定时间tg0_th短。速度恢复时间tg0是在车轮速度波动控制的开始后从在步骤705和步骤710中判定为“是”起经过的时间。需要说明的是,速度恢复时间tg0在步骤705和步骤710中判定为“是”之后又在步骤705或步骤710中判定为“否”的情况下被清除。
153.cpu在步骤715中判定为“是”的情况下,使处理进入步骤720,执行先前所述的车轮速度波动控制。由此,首先,开始第一增减控制和后轮维持控制,之后,在经过了半周期时间tcyh的时间点停止后轮维持控制并开始第二增减控制,之后,只要规定停止条件不成立,就以每次错开半周期cyh的方式重复执行第一增减控制和第二增减控制。接着,cpu经由步骤795和图6的步骤695使处理进入图5的步骤595,暂时结束本例程。
154.另一方面,cpu在步骤715中判定为“否”的情况下,使处理进入步骤725,停止车轮速度恢复控制。由此,车轮速度波动控制被停止。
155.接着,cpu使处理进入步骤730,将车轮速度恢复控制标志xg的值设定为“0”。由此,在图5的步骤515中判定为“是”。接着,cpu经由步骤795和图6的步骤695使处理进入图5的步骤595,暂时结束本例程。
156.cpu在步骤705中判定为“否”的情况下以及在步骤710中判定为“否”的情况下,使处理进入步骤720,执行车轮速度波动控制。接着,cpu经由步骤795和图6的步骤695使处理进入图5的步骤595,暂时结束本例程。
157.需要说明的是,cpu在图5的步骤505中判定为“否”的情况下,使处理进入步骤540,在正在执行通常制动控制的情况下,停止通常制动控制,在正在执行车轮速度恢复控制的情况下,停止车轮速度恢复控制。接着,cpu使处理进入步骤545,将车轮速度恢复控制标志xg的值设定为“0”。接着,cpu使处理进入步骤595,暂时结束本例程。
158.以上是车辆控制装置10的具体的工作。在车辆控制装置10进行了图5至图7所示的例程的情况下,在车轮速度波动控制的执行中,前轮制动力bf一起被增大且一起被减小。即,前轮制动力bf未单独地被增减。同样地,在车轮速度波动控制的执行中,后轮制动力br一起被增大且一起被减小。即,后轮制动力br未单独地被增减。因此,会抑制所有的车轮速度同时比实际的车身速度的降低大幅降低。
159.而且,在第一增减控制和第二增减控制的执行中,即使前轮速度vf降低,后轮速度vr也上升,反之,即使后轮速度vr降低,前轮速度vf也上升。因此,会抑制所有的车轮速度同时比实际的车身速度的降低大幅降低。
160.需要说明的是,本发明不限定于上述实施方式,可以在本发明的范围内采用各种变形例。
161.<第一变形例>
162.例如,本发明的实施方式的第一变形例的车辆控制装置10如以下这样进行车轮速度恢复控制。以下,将第一变形例的车辆控制装置10简称为“车辆控制装置10”。
163.<工作的概要>
164.当判定为制动踏板31被驾驶员操作时,车辆控制装置10执行先前所述的通常制动控制。车辆控制装置10在通常制动控制的执行中车轮速度v中的任一个成为小于下限车轮速度vref的情况下,停止通常制动控制,并执行车轮速度恢复控制。第一变形例的车轮速度恢复控制包括先前所述的初期前轮减小控制和初期后轮减小控制以及以下所述的车轮速度波动控制。
165.<车轮速度波动控制>
166.第一变形例的车轮速度波动控制包括先前所述的后轮维持控制和以下所述的“第一增大控制、第一减小控制、第二增大控制以及第二减小控制”。
167.<第一增大控制>
168.第一增大控制是使前轮制动力bf以第一增大率ru1一起增大的控制。
169.在本例子中,在第一增大控制的执行中,左前轮制动力bfl与右前轮制动力bfr彼此相等的状态被保持。然而,第一增大控制的执行中的左前轮制动力bfl与右前轮制动力bfr的关系不限定于本例子中的关系。
170.<第一减小控制>
171.第一减小控制是使前轮制动力bf以第一减小率rd1一起减小的控制,是在该第一减小控制的执行中前轮速度vf达到恢复判定阈值vg的情况下,之后将前轮制动力bf一起维持为前轮速度vf达到恢复判定阈值vg的时间点的前轮制动力bf的控制。恢复判定阈值vg被设定为比下限车轮速度vref大且比车身速度小的值。
172.在本例子中,在第一减小控制的执行中,左前轮制动力bfl与右前轮制动力bfr彼此相等的状态被保持。然而,第一减小控制的执行中的左前轮制动力bfl与右前轮制动力bfr的关系不限定于本例子中的关系。
173.<第二增大控制>
174.第二增大控制是使后轮制动力br以第二增大率ru2一起增大的控制。
175.在本例子中,在第二增大控制的执行中,左后轮制动力brl与右后轮制动力brr彼此相等的状态被保持。然而,第二增大控制的执行中的左后轮制动力brl与右后轮制动力brr的关系不限定于本例子中的关系。
176.<第二减小控制>
177.第二减小控制是使后轮制动力br以第二减小率rd2一起减小的控制,是在该第二减小控制的执行中后轮速度vr达到恢复判定阈值vg的情况下,之后将后轮制动力br一起维持为后轮速度vr达到恢复判定阈值vg的时间点的后轮制动力br的控制。
178.在本例子中,在第二减小控制的执行中,左后轮制动力brl与右后轮制动力brr彼此相等的状态被保持。然而,第二减小控制的执行中的左后轮制动力brl与右后轮制动力brr的关系不限定于本例子中的关系。
179.当开始车轮速度恢复控制时,车辆控制装置10首先开始初期前轮减小控制和初期后轮减小控制。由此,前轮制动力bf一起被减小,并且后轮制动力br一起被减小。其结果是,前轮速度vf和后轮速度vr一起上升。
180.车辆控制装置10持续初期前轮减小控制和初期后轮减小控制的执行,直到前轮速度vf中的任一个和后轮速度vr中的任一个成为恢复判定阈值vg以上为止。然而,车辆控制装置10也可以被配置为:持续初期前轮减小控制和初期后轮减小控制的执行,直到前轮速度vf和后轮速度vr全部成为恢复判定阈值vg以上为止。或者,车辆控制装置10也可以被配置为:持续初期前轮减小控制和初期后轮减小控制的执行,直到前轮速度vf的平均值和后轮速度vr的平均值成为恢复判定阈值vg以上为止。
181.当前轮速度vf中的任一个和后轮速度vr中的任一个成为恢复判定阈值vg以上时,车辆控制装置10停止初期前轮减小控制和初期后轮减小控制,并开始车轮速度波动控制。当开始车轮速度波动控制时,车辆控制装置10开始第一增大控制和后轮维持控制。由此,前轮制动力bf一起被增大,并且后轮制动力br一起被维持为后轮维持控制的开始时间点的后轮制动力br。其结果是,前轮速度vf一起降低,后轮速度vr持续上升。
182.车辆控制装置10持续第一增大控制和后轮维持控制的执行,直到在第一增大控制和后轮维持控制的执行中前轮速度vf中的任一个成为小于下限车轮速度vref为止。然而,车辆控制装置10也可以被配置为:持续第一增大控制和后轮维持控制的执行,直到两方的前轮速度vf均成为小于下限车轮速度vref为止。或者,车辆控制装置10也可以被配置为:持续第一增大控制和后轮维持控制的执行,直到前轮速度vf的平均值成为小于下限车轮速度vref为止。
183.当在第一增大控制和后轮维持控制的执行中前轮速度vf中的任一个成为小于下限车轮速度vref时,车辆控制装置10停止第一增大控制和后轮维持控制,并开始第一减小控制和第二增大控制。由此,前轮制动力bf一起被减小,并且后轮制动力br一起被增大。其结果是,前轮速度vf上升,后轮速度vr降低。
184.车辆控制装置10持续第一减小控制和第二增大控制的执行,直到后轮速度vr中的任一个成为小于下限车轮速度vref为止,或者,只要规定停止条件不成立,就持续第一减小控制和第二增大控制的执行。此处的规定停止条件在第一减小控制和第二增大控制的执行中两方的后轮速度vr均为下限车轮速度vref以上的状态持续了规定时间tg2_th的期间时成立。以下,将两方的后轮速度vr均为下限车轮速度vref以上的状态所持续的时间称为“后轮速度恢复时间tg2”。
185.需要说明的是,车辆控制装置10也可以被配置为:在第一减小控制和第二增大控制的执行中两方的后轮速度vr成为下限车轮速度vref以上的时间点判定为规定停止条件成立。
186.此外,在本例子中,车辆控制装置10持续第一减小控制和第二增大控制的执行,直到后轮速度vr中的任一个成为小于下限车轮速度vref为止。然而,车辆控制装置10也可以被配置为:持续第一减小控制和第二增大控制的执行,直到两方的后轮速度vr均成为小于下限车轮速度vref为止。或者,车辆控制装置10也可以被配置为:持续第一减小控制和第二增大控制的执行,直到后轮速度vr的平均值成为小于下限车轮速度vref为止。
187.当在第一减小控制和第二增大控制的执行中后轮速度vr中的任一个成为小于下限车轮速度vref时,车辆控制装置10停止第一减小控制和第二增大控制,并开始第一增大控制和第二减小控制。由此,前轮制动力bf一起被增大,并且后轮制动力br一起被减小。其结果是,前轮速度vf降低,后轮速度vr上升。
188.车辆控制装置10持续第一增大控制和第二减小控制的执行,直到前轮速度vf中的任一个成为小于下限车轮速度vref为止,或者,只要规定停止条件不成立,就持续第一增大控制和第二减小控制的执行。此处的规定停止条件在第一增大控制和第二减小控制的执行中两方的前轮速度vf均为下限车轮速度vref以上的状态持续了规定时间tg1_th的期间时成立。以下,将两方的前轮速度vf均为下限车轮速度vref以上的状态所持续的时间点称为“前轮速度恢复时间tg1”。
189.需要说明的是,车辆控制装置10也可以被配置为:在第一增大控制和第二减小控制的执行中两方的前轮速度vf均成为下限车轮速度vref以上的时间点判定为规定停止条件成立。
190.此外,在本例子中,车辆控制装置10持续第一增大控制和第二减小控制的执行,直到前轮速度vf中的任一个成为小于下限车轮速度vref为止。然而,车辆控制装置10也可以
被配置为:持续第一增大控制和第二减小控制的执行,直到两方的前轮速度vf均成为小于下限车轮速度vref为止。或者,车辆控制装置10也可以被配置为:持续第一增大控制和第二减小控制的执行,直到前轮速度vf的平均值成为小于下限车轮速度vref为止。
191.只要规定停止条件不成立,车辆控制装置10就交替地重复执行“第一减小控制和第二增大控制”以及“第一增大控制和第二减小控制”。
192.车辆控制装置10在车轮速度波动控制的执行中规定停止条件成立的情况下,停止车轮速度恢复控制,并再次开始通常制动控制。
193.在车轮速度恢复控制被执行的情况下,例如,如图8所示,制动力b被控制,车轮速度v发生变化。在图8中,前轮制动力bf和前轮速度vf以实线表示,后轮制动力br和后轮速度vr以点划线表示。
194.在图8所示的例子中,在时刻t80,开始通常制动控制。由此,前轮制动力bf和后轮制动力br一起被增大。其结果是,前轮速度vf和后轮速度vr一起降低。
195.之后,在时刻t81,前轮速度vf和后轮速度vr降低至下限车轮速度vref。因此,在时刻t81,开始初期前轮减小控制和初期后轮减小控制。由此,前轮制动力bf和后轮制动力br一起被减小。其结果是,前轮速度vf和后轮速度vr在低于下限车轮速度vref之后一起上升。
196.之后,在时刻t82,前轮速度vf和后轮速度vr达到恢复判定阈值vg。因此,在时刻t82,开始车轮速度波动控制。当开始车轮速度波动控制时,开始第一增大控制和后轮维持控制。由此,前轮制动力bf被增大,后轮制动力br被维持。其结果是,前轮速度vf在高于恢复判定阈值vg之后降低。另一方面,后轮速度vr在持续上升之后随着车身速度的降低而降低。
197.之后,在时刻t83,前轮速度vf降低至下限车轮速度vref。因此,在时刻t83,开始第一减小控制和第二增大控制。由此,前轮制动力bf被减小,后轮制动力br被增大。其结果是,前轮速度vf在低于下限车轮速度vref之后上升。另一方面,后轮速度vr降低。
198.之后,在时刻t84,后轮速度vr降低至下限车轮速度vref。因此,在时刻t84,开始第一增大控制和第二减小控制。由此,前轮制动力bf被增大,后轮制动力br被减小。其结果是,前轮速度vf降低。另一方面,后轮速度vr在低于下限车轮速度vref之后上升。
199.之后,重复执行“第一增大控制和第二减小控制”以及“第一减小控制和第二增大控制”,直到规定停止条件成立为止。
200.<效果>
201.如上所述,为了缩短车辆的制动距离,抑制所有的车轮速度同时比实际的车身速度的降低大幅降低即可,所有的车轮速度同时比实际的车身速度的降低大幅降低的原因在于单独地使附加于各车轮的制动力增减。
202.根据第一变形例的车辆控制装置10,在车轮速度波动控制的执行中,前轮制动力bf一起被增大且一起被减小。即,前轮制动力bf未单独地被增减。同样地,在车轮速度波动控制的执行中,后轮制动力br一起被增大且一起被减小。即,后轮制动力br未单独地被增减。因此,会抑制所有的车轮速度同时比实际的车身速度的降低大幅降低。
203.而且,在第一增大控制被执行时,第二减小控制被执行,因此,即使前轮速度vf降低,后轮速度vr也上升。此外,在第二增大控制被执行时,第一减小控制被执行,因此,即使后轮速度vr降低,前轮速度vf也上升。因此,会抑制所有的车轮速度同时比实际的车身速度的降低大幅降低。
204.<具体的工作>
205.第一变形例的车辆控制装置10的ecu90的cpu每经过规定时间tc就执行图5所示的例程。在该情况下,cpu在图5的步骤535中执行图9所示的例程来代替图6所示的例程。
206.因此,当使处理进入图5的步骤535时,cpu从图9的步骤900开始处理,并使该处理进入步骤905,将车轮速度恢复控制标志xg的值设定为“1”。接着,cpu使处理进入步骤910,判定两方的前轮速度vf是否均小于恢复判定阈值vg。cpu在步骤910中判定为“是”的情况下,使处理进入步骤915。
207.另一方面,cpu在步骤910中判定为“否”的情况下,使处理进入步骤920,判定两方的后轮速度vr是否均小于恢复判定阈值vg。cpu在步骤920中判定为“是”的情况下,使处理进入步骤915。
208.当使处理进入步骤915时,cpu执行先前所述的初期前轮减小控制和初期后轮减小控制。之后,经由步骤995使处理进入图5的步骤595,暂时结束本例程。
209.另一方面,cpu在步骤920中判定为“否”的情况下,使处理进入步骤925,停止初期前轮减小控制和初期后轮减小控制。接着,cpu使处理进入步骤930,执行车轮速度波动控制。车轮速度波动控制通过执行图10所示的例程来执行。
210.因此,当使处理进入步骤930时,cpu从图10的步骤1000开始处理,并使该处理进入步骤1005,判定第一增大控制标志x1的值是否为“1”。第一增大控制标志x1的值在第一增大控制开始时被设定为“1”,在第一增大控制停止时被设定为“0”。
211.cpu在步骤1005中判定为“是”的情况下,使处理进入步骤1010,判定两方的前轮速度vf是否均为下限车轮速度vref以上。
212.cpu在步骤1010中判定为“是”的情况下,使处理进入步骤1015,判定前轮速度恢复时间tg1是否比规定时间tg1_th短。
213.cpu在步骤1015中判定为“是”的情况下,使处理进入步骤1020。而且,cpu在步骤1005中判定为“否”的情况下以及在步骤1010中判定为“否”的情况下也使处理进入步骤1020。
214.当使处理进入步骤1020时,cpu判定第二增大控制标志x2的值是否为“1”。第二增大控制标志x2的值在第二增大控制开始时被设定为“1”,在第二增大控制停止时被设定为“0”。
215.cpu在步骤1020中判定为“是”的情况下,使处理进入步骤1025,判定两方的后轮速度vr是否均为下限车轮速度vref以上。
216.cpu在步骤1025中判定为“是”的情况下,使处理进入步骤1030,判定后轮速度恢复时间tg2是否比规定时间tg2_th短。
217.cpu在步骤1030中判定为“是”的情况下,使处理进入步骤1035。而且,cpu在步骤1020中判定为“否”的情况下以及在步骤1025中判定为“否”的情况下也使处理进入步骤1035。
218.当使处理进入步骤1035时,cpu执行先前所述的车轮速度波动控制。接着,cpu经由步骤1095和图9的步骤995使处理进入图5的步骤595,暂时结束本例程。
219.cpu在步骤1015中判定为“否”的情况下以及在步骤1030中判定为“否”的情况下,使处理进入步骤1040,停止车轮速度恢复控制。由此,车轮速度波动控制被停止。接着,cpu
使处理进入步骤1045,将车轮速度恢复控制标志xg的值设定为“0”。接着,cpu经由步骤1095和图9的步骤995使处理进入图5的步骤595,暂时结束本例程。
220.以上是第一变形例的车辆控制装置10的具体的工作。第一变形例的车辆控制装置10在进行了图5、图9以及图10所示的例程的情况下,在车轮速度波动控制的执行中,前轮制动力bf一起被增大且一起被减小。即,前轮制动力bf未单独地被增减。同样地,在车轮速度波动控制的执行中,后轮制动力br一起被增大且一起被减小。即,后轮制动力br未单独地被增减。因此,会抑制所有的车轮速度同时比实际的车身速度的降低大幅降低。
221.而且,第一增大控制和第二减小控制同时被执行,此外,第二增大控制和第一减小控制同时被执行。因此,即使前轮速度vf降低,后轮速度vr也上升,反之,即使后轮速度vr降低,前轮速度vf也上升。因此,会抑制所有的车轮速度同时比实际的车身速度的降低大幅降低。
222.<第二变形例>
223.接着,对本发明的实施方式的第二变形例的车辆控制装置10进行说明。第二变形例的车辆控制装置10如以下这样进行车轮速度恢复控制。以下,将第二变形例的车辆控制装置10简称为“车辆控制装置10”。
224.<工作的概要>
225.当判定为制动踏板31被驾驶员操作时,车辆控制装置10执行先前所述的通常制动控制。车辆控制装置10在通常制动控制的执行中车轮速度v中的任一个成为小于下限车轮速度vref的情况下,停止通常制动控制,并开始车轮速度恢复控制。第二变形例的车轮速度恢复控制包括先前所述的初期前轮减小控制和初期后轮减小控制以及以下所述的车轮速度波动控制。
226.<车轮速度波动控制>
227.第二变形例的车轮速度波动控制包括先前所述的“第一增大控制、第一减小控制、第二增大控制以及第二减小控制”。当开始车轮速度恢复控制时,车辆控制装置10首先开始初期前轮减小控制和初期后轮减小控制。由此,前轮速度vf和后轮速度vr一起上升。
228.车辆控制装置10在初期前轮减小控制的执行中前轮速度vf中的任一个成为恢复判定阈值vg以上的时间点,停止初期前轮减小控制,并开始第一增大控制。由此,前轮速度vf一起降低。此外,车辆控制装置10在第一增大控制的执行中前轮速度vf中的任一个成为小于下限车轮速度vref的时间点,停止第一增大控制,并开始第一减小控制。由此,前轮速度vf一起上升。进而,车辆控制装置10在第一减小控制的执行中前轮速度vf中的任一个成为恢复判定阈值vg以上的时间点,停止第一减小控制,并开始第一增大控制。
229.只要规定停止条件不成立,车辆控制装置10就重复执行第一增大控制和第一减小控制。此处的规定停止条件在车轮速度波动控制的执行中所有的车轮速度v为下限车轮速度vref以上的状态持续了规定时间tg0_th的期间的情况下成立。
230.需要说明的是,车辆控制装置10也可以被配置为:在第一减小控制的执行中两方的前轮速度vf均成为恢复判定阈值vg以上的情况下,或者,在第一减小控制的执行中前轮速度vf的平均值成为恢复判定阈值vg以上的情况下,停止第一减小控制,并执行第一增大控制。
231.另一方面,车辆控制装置10在初期后轮减小控制的执行中后轮速度vr中的任一个
成为恢复判定阈值vg以上的时间点,停止初期后轮减小控制,并开始第二增大控制。由此,后轮速度vr一起降低。此外,车辆控制装置10在第二增大控制的执行中后轮速度vr中的任一个成为小于下限车轮速度vref的时间点,停止第二增大控制,并开始第二减小控制。由此,后轮速度vr一起上升。进而,车辆控制装置10在第二减小控制的执行中后轮速度vr中的任一个成为恢复判定阈值vg以上的时间点,停止第二减小控制,并开始第二增大控制。
232.只要规定停止条件不成立,车辆控制装置10就重复执行第二增大控制和第二减小控制。此处的规定停止条件在车轮速度波动控制的执行中所有的车轮速度v为下限车轮速度vref以上的状态持续了规定时间tg0_th的期间的情况下成立。
233.需要说明的是,车辆控制装置10也可以被配置为:在第二减小控制的执行中两方的后轮速度vr均成为恢复判定阈值vg以上的情况下,或者,在第二减小控制的执行中后轮速度vr的平均值成为恢复判定阈值vg以上的情况下,停止第二减小控制,并执行第二增大控制。
234.在第二变形例的车轮速度恢复控制被执行的情况下,例如,如图11所示,制动力b被控制,车轮速度v发生变化。在图11中,前轮制动力bf和前轮速度vf以实线表示,后轮制动力br和后轮速度vr以点划线表示。
235.在图11所示的例子中,在时刻t110,开始通常制动控制。由此,前轮制动力bf和后轮制动力br一起被增大。其结果是,前轮速度vf和后轮速度vr一起降低。此时,车辆载荷向车辆100的前部移动。其结果是,车辆100的前部的载荷lf增大,车辆100的后部的载荷lr减小。
236.之后,在时刻t111,前轮速度vf和后轮速度vr降低至下限车轮速度vref。因此,在时刻t111,开始初期前轮减小控制和初期后轮减小控制。由此,前轮制动力bf和后轮制动力br一起降低。其结果是,前轮速度vf和后轮速度vr一起上升。此时,车辆载荷向车辆100的后部移动。其结果是,车辆100的前部的载荷lf减小,车辆100的后部的载荷lr增大。因此,后轮速度vr比前轮速度vf更快地上升。因此,后轮速度vr容易比前轮速度vf更快地达到恢复判定阈值vg。即,达到恢复判定阈值vg的定时在前轮速度vf和后轮速度vr不同的概率变高。
237.之后,在时刻t112,后轮速度vr达到恢复判定阈值vg。因此,在时刻t112,对后轮制动力br开始车轮速度波动控制。当对后轮制动力br开始车轮速度波动控制时,开始第二增大控制。由此,后轮制动力br被增大。其结果是,后轮速度vr一起降低。需要说明的是,在时刻t112的时间点,前轮速度vf未达到恢复判定阈值vg,因此继续进行初期前轮减小控制。因此,前轮速度vf一起持续上升。此时,车辆载荷的移动小。
238.之后,在时刻t113,前轮速度vf达到恢复判定阈值vg。因此,在时刻t113,开始第一增大控制。由此,前轮制动力bf被增大。其结果是,前轮速度vf一起降低。需要说明的是,在时刻t113的时间点,后轮速度vr为下限车轮速度vref以上,因此继续进行第二增大控制。因此,后轮速度vr一起持续降低。此时,车辆载荷向车辆100的前部移动。其结果是,车辆100的前部的载荷lf增大,车辆100的后部的载荷lr减小。因此,后轮速度vr比前轮速度vf更快地降低。因此,后轮速度vr容易比前轮速度vf更快地达到下限车轮速度vref。即,达到下限车轮速度vref的定时在前轮速度vf和后轮速度vr不同的概率变高。
239.之后,在时刻t114,后轮速度vr达到下限车轮速度vref。因此,在时刻t114,开始第二减小控制。由此,后轮制动力br被减小。其结果是,后轮速度vr一起上升。需要说明的是,
在时刻t114的时间点,前轮速度vf为下限车轮速度vref以上,因此继续进行第一增大控制。因此,前轮速度vf一起持续降低。此时,车辆载荷的移动小。
240.之后,只要规定停止条件不成立,就持续车轮速度波动控制的执行。
241.<效果>
242.第二变形例的车辆控制装置10与实施方式的车辆控制装置10和第一变形例的车辆控制装置10不同,未积极地进行在使前轮制动力bf增大时使后轮制动力br减小的控制以及在使后轮制动力br增大时使前轮制动力bf减小的控制。
243.然而,第二变形例的车辆控制装置10使前轮制动力bf的两方一起增大或减小,并且,使后轮制动力br的两方一起增大或减小。由此,会抑制所有的车轮速度v同时比实际的车身速度的降低大幅降低。
244.即,如上所述,若使前轮制动力bf一起增减且使后轮制动力br一起增减,则车辆载荷在车辆100的前部与后部之间移动。因此,在前轮速度vf与后轮速度vr之间,达到下限车轮速度vref的定时和达到恢复判定阈值vg的定时不同的概率变高。这意味着所有的车轮速度v不会同时比实际的车身速度的降低大幅降低。因此,会抑制所有的车轮速度v同时比实际的车身速度的降低大幅降低。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1