一种高精度型智能搬运机器人脚轮免拆清洁设备的制作方法
1.本发明涉及机器人技术领域,更具体地说,本发明涉及一种高精度型智能搬运机器人脚轮免拆清洁设备。
背景技术:
2.搬运机器人是近代自动控制领域出现的一项高新技术,涉及到了力学,机械学,电器液压气压技术,自动控制技术,传感器技术,单片机技术和计算机技术等学科领域,已成为现代机械制造生产体系中的一项重要组成部分,它的优点是可以通过编程完成各种预期的任务,在自身结构和性能上有了人和机器的各自优势,尤其体现出了人工智能和适应性,搬运机器人是可以进行自动化搬运作业的工业机器人,最早的搬运机器人出现在1960年的美国,搬运作业是指用一种设备握持工件,是指从一个加工位置移到另一个加工位置,搬运机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,大大减轻了人类繁重的体力劳动,世界上使用的搬运机器人逾10万台,被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运,部分发达国家已制定出人工搬运的最大限度,超过限度的必须由搬运机器人来完成。
3.搬运机器人大多用于物流与器械加工与运输的过程中使用的新型搬运设备,可以大幅度降低人力的浪费,部分搬运机器人存在较多的移动轨迹,同时大多数搬运机器人的工作场所处于非无尘车间,这会让搬运机器人的脚轮存在较多的灰尘,影响机器人的移动精准性。
技术实现要素:
4.为了克服现有技术的上述缺陷,本发明的实施例提供一种高精度型智能搬运机器人脚轮免拆清洁设备,通过设置了筒型传动清洁辅助机构,螺纹型支撑悬杆通过第一对应型垂直传动齿轮带动第二对应型垂直传动齿轮进行旋转,第二对应型垂直传动齿轮通过联轴型传动软轴带动滚筒状清洁柱进行旋转,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种高精度型智能搬运机器人脚轮免拆清洁设备,包括筒型传动清洁辅助机构,所述筒型传动清洁辅助机构的底部固定安装有旋转型脚轮清洁支撑机构,所述筒型传动清洁辅助机构与相邻的旋转型脚轮清洁支撑机构均呈一一对应设置,所述筒型传动清洁辅助机构的底部铰接有翘板型支撑机构,所述翘板型支撑机构设置在旋转型脚轮清洁支撑机构的一侧,所述旋转型脚轮清洁支撑机构与相邻的翘板型支撑机构均呈一一对应设置;
6.所述筒型传动清洁辅助机构包括对应型筒状支撑机构,所述对应型筒状支撑机构的内部开设有中空型活动预留槽,所述中空型活动预留槽的内腔转动连接有螺纹型支撑悬杆,所述螺纹型支撑悬杆的外壁套接有两个对半型对应支撑套筒,两个所述对半型对应支撑套筒的内壁均开设有相对应的对应型限位传动齿槽,两个相邻的所述对半型对应支撑套筒顶部均铰接有第一球形扭簧连接轴,两个所述对半型对应支撑套筒的顶部均通过相应的
第一球形扭簧连接轴铰接有一个主支撑连接套筒,所述螺纹型支撑悬杆的底部焊接有第一对应型垂直传动齿轮,所述旋转型脚轮清洁支撑机构包括第二对应型垂直传动齿轮,所述第二对应型垂直传动齿轮与相邻的第一对应型垂直传动齿轮均相互啮合,所述第二对应型垂直传动齿轮的一端啮合有联轴型传动软轴,所述联轴型传动软轴的输出轴端部通过联轴器啮合有滚筒状清洁柱。
7.在一个优选地实施方式中,所述对半型对应支撑套筒与相邻的第一球形扭簧连接轴均呈一一对应设置,所述两个相邻的所述对半型对应支撑套筒均关于主支撑连接套筒竖直向中心线呈镜像对称设置。
8.在一个优选地实施方式中,所述主支撑连接套筒的顶部通过螺栓固定安装有横置握把横杆,所述横置握把横杆与相邻的主支撑连接套筒均呈一一对应设置,所述横置握把横杆设置在对半型对应支撑套筒的顶部,所述横置握把横杆的外壁包覆有防滑涂层。
9.在一个优选地实施方式中,所述螺纹型支撑悬杆与第一对应型垂直传动齿轮之间均焊接有限位型防撞框架,所述螺纹型支撑悬杆与相邻的限位型防撞框架均呈一一对应设置,所述螺纹型支撑悬杆与第一对应型垂直传动齿轮之间均固定安装有限位型联轴器,所述对应型筒状支撑机构的底部通过螺栓固定安装有防滑型底座,所述对应型筒状支撑机构的外壁固定安装有连接型中置套环,所述连接型中置套环的一侧固定安装有双半圆状束缚框,所述连接型中置套环与相邻的双半圆状束缚框均呈一一对应设置,所述对应型筒状支撑机构的顶部固定安装有挤压型限位套环,所述挤压型限位套环的内部设有预留型纵置滑槽,所述对半型对应支撑套筒与螺纹型支撑悬杆的外壁均固定安装有对应型滑动插块,所述对应型滑动插块与相邻的预留型纵置滑槽相互对应设置。
10.在一个优选地实施方式中,所述联轴型传动软轴与相邻的滚筒状清洁柱均呈一一对应设置,所述联轴型传动软轴与相邻的第一外护型支撑管套均呈一一对应设置,所述联轴型传动软轴与相邻的滚筒状清洁柱之间均固定安装有第二外护型支撑管套,所述第一外护型支撑管套靠近滚筒状清洁柱的一端焊接有第二球形扭簧连接轴,所述第一外护型支撑管套的顶部通过第二球形扭簧连接轴铰接有弧形滚筒支撑板,所述第二球形扭簧连接轴与相邻的弧形滚筒支撑板均呈一一对应设置。
11.在一个优选地实施方式中,所述翘板型支撑机构包括弧形脚踏支撑板,所述弧形脚踏支撑板的一侧分别固定安装有第一起翘型插接板与第二起翘型插接板,所述弧形脚踏支撑板与相邻的第一起翘型插接板和第二起翘型插接板之间均固定安装有支撑型承重连接销,所述支撑型承重连接销铰接在相邻的筒型传动清洁辅助机构外壁。
12.在一个优选地实施方式中,所述第一起翘型插接板与第二起翘型插接板的一端均通过螺栓固定安装有限位型插接框架,所述限位型插接框架的一端固定安装有斜面型支撑插板,所述限位型插接框架与相邻的斜面型支撑插板均呈一一对应设置,所述弧形脚踏支撑板的内部开设有预留型活动空槽,所述预留型活动空槽的数量设置为多个。
13.本发明的技术效果和优点:
14.1、本发明通过设置了筒型传动清洁辅助机构,通过横置握把横杆带动主支撑连接套筒向下运动,主支撑连接套筒带动对半型对应支撑套筒与螺纹型支撑悬杆进行旋转,使得预留型纵置滑槽与相邻的对应型滑动插块相互错开,对应型滑动插块支撑在挤压型限位套环的内壁,螺纹型支撑悬杆与对应型限位传动齿槽相互啮合,螺纹型支撑悬杆进行旋转,
螺纹型支撑悬杆通过第一对应型垂直传动齿轮带动第二对应型垂直传动齿轮进行旋转,第二对应型垂直传动齿轮通过联轴型传动软轴带动滚筒状清洁柱进行旋转,使得脚轮可以更加便捷的进行手动清洁;
15.2、本发明通过设置了翘板型支撑机构,弧形脚踏支撑板通过支撑型承重连接销带动第一起翘型插接板与第二起翘型插接板插接在搬运机器人的脚轮附近,通过翘板的原理,将脚轮翘起,通过滚筒状清洁柱的旋转对脚轮进行清洁,相对提升了脚轮底部清洁的便捷性。
附图说明
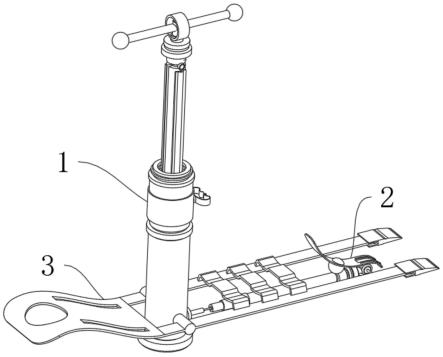
16.图1为本发明的整体结构示意图。
17.图2为本发明的底部结构示意图。
18.图3为本发明的局部结构剖视图。
19.图4为本发明图3的a部结构放大图。
20.图5为本发明图3的b部结构放大图。
21.图6为本发明图3的c部结构放大图。
22.图7为本发明图3的d部结构放大图。
23.图8为本发明筒型传动清洁辅助机构的局部结构示意图。
24.附图标记为:1筒型传动清洁辅助机构、101对应型筒状支撑机构、102中空型活动预留槽、103螺纹型支撑悬杆、104对半型对应支撑套筒、105对应型限位传动齿槽、106第一球形扭簧连接轴、107主支撑连接套筒、108横置握把横杆、109第一对应型垂直传动齿轮、110限位型防撞框架、111限位型联轴器、112防滑型底座、113连接型中置套环、114双半圆状束缚框、115挤压型限位套环、116预留型纵置滑槽、117对应型滑动插块、2旋转型脚轮清洁支撑机构、21第二对应型垂直传动齿轮、22联轴型传动软轴、23滚筒状清洁柱、24第一外护型支撑管套、25第二外护型支撑管套、26第二球形扭簧连接轴、27弧形滚筒支撑板、3翘板型支撑机构、31弧形脚踏支撑板、32第一起翘型插接板、33第二起翘型插接板、34支撑型承重连接销、35限位型插接框架、36斜面型支撑插板、37预留型活动空槽。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.参照说明书附图1-8,本发明所提供的一实施例:
27.一种高精度型智能搬运机器人脚轮免拆清洁设备,包括筒型传动清洁辅助机构1,筒型传动清洁辅助机构1的底部固定安装有旋转型脚轮清洁支撑机构2,筒型传动清洁辅助机构1与相邻的旋转型脚轮清洁支撑机构2均呈一一对应设置,筒型传动清洁辅助机构1的底部铰接有翘板型支撑机构3,翘板型支撑机构3设置在旋转型脚轮清洁支撑机构2的一侧,旋转型脚轮清洁支撑机构2与相邻的翘板型支撑机构3均呈一一对应设置,筒型传动清洁辅助机构1包括对应型筒状支撑机构101,对应型筒状支撑机构101的内部开设有中空型活动
预留槽102,中空型活动预留槽102的内腔转动连接有螺纹型支撑悬杆103,螺纹型支撑悬杆103的外壁套接有两个对半型对应支撑套筒104,两个对半型对应支撑套筒104的内壁均开设有相对应的对应型限位传动齿槽105,对应型滑动插块117支撑在挤压型限位套环115的内壁,相邻的螺纹型支撑悬杆103与对半型对应支撑套筒104通过第一球形扭簧连接轴106卡合在螺纹型支撑悬杆103的外壁,同时螺纹型支撑悬杆103与对应型限位传动齿槽105相互啮合,两个相邻的对半型对应支撑套筒104顶部均铰接有第一球形扭簧连接轴106,两个对半型对应支撑套筒104的顶部均通过相应的第一球形扭簧连接轴106铰接有一个主支撑连接套筒107,螺纹型支撑悬杆103的底部焊接有第一对应型垂直传动齿轮109,通过横置握把横杆108带动主支撑连接套筒107向下运动,主支撑连接套筒107带动对半型对应支撑套筒104与螺纹型支撑悬杆103进行旋转,使得预留型纵置滑槽116与相邻的对应型滑动插块117相互错开,旋转型脚轮清洁支撑机构2包括第二对应型垂直传动齿轮21,第二对应型垂直传动齿轮21与相邻的第一对应型垂直传动齿轮109均相互啮合,第二对应型垂直传动齿轮21的一端啮合有联轴型传动软轴22,联轴型传动软轴22的输出轴端部通过联轴器啮合有滚筒状清洁柱23,滚筒状清洁柱23的旋转可以对脚轮进行清洁。
28.对半型对应支撑套筒104与相邻的第一球形扭簧连接轴106均呈一一对应设置,两个相邻的对半型对应支撑套筒104均关于主支撑连接套筒107竖直向中心线呈镜像对称设置,主支撑连接套筒107的顶部通过螺栓固定安装有横置握把横杆108,横置握把横杆108与相邻的主支撑连接套筒107均呈一一对应设置,横置握把横杆108设置在对半型对应支撑套筒104的顶部,横置握把横杆108的外壁包覆有防滑涂层,螺纹型支撑悬杆103与第一对应型垂直传动齿轮109之间均焊接有限位型防撞框架110,螺纹型支撑悬杆103通过第一对应型垂直传动齿轮109带动第二对应型垂直传动齿轮21进行旋转,第二对应型垂直传动齿轮21通过联轴型传动软轴22带动滚筒状清洁柱23进行旋转,螺纹型支撑悬杆103与相邻的限位型防撞框架110均呈一一对应设置,螺纹型支撑悬杆103与第一对应型垂直传动齿轮109之间均固定安装有限位型联轴器111,对应型筒状支撑机构101的底部通过螺栓固定安装有防滑型底座112,对应型筒状支撑机构101的外壁固定安装有连接型中置套环113,连接型中置套环113的一侧固定安装有双半圆状束缚框114,连接型中置套环113与相邻的双半圆状束缚框114均呈一一对应设置,对应型筒状支撑机构101的顶部固定安装有挤压型限位套环115,挤压型限位套环115的内部设有预留型纵置滑槽116,对半型对应支撑套筒104与螺纹型支撑悬杆103的外壁均固定安装有对应型滑动插块117,对应型滑动插块117与相邻的预留型纵置滑槽116相互对应设置。
29.联轴型传动软轴22与相邻的滚筒状清洁柱23均呈一一对应设置,联轴型传动软轴22与相邻的第一外护型支撑管套24均呈一一对应设置,联轴型传动软轴22与相邻的滚筒状清洁柱23之间均固定安装有第二外护型支撑管套25,第一外护型支撑管套24靠近滚筒状清洁柱23的一端焊接有第二球形扭簧连接轴26,第一外护型支撑管套24的顶部通过第二球形扭簧连接轴26铰接有弧形滚筒支撑板27,第二球形扭簧连接轴26与相邻的弧形滚筒支撑板27均呈一一对应设置,翘板型支撑机构3包括弧形脚踏支撑板31,弧形脚踏支撑板31的一侧分别固定安装有第一起翘型插接板32与第二起翘型插接板33,弧形脚踏支撑板31通过支撑型承重连接销34带动第一起翘型插接板32与第二起翘型插接板33插接在搬运机器人的脚轮附近,通过翘板的原理,将脚轮翘起,弧形脚踏支撑板31与相邻的第一起翘型插接板32和
第二起翘型插接板33之间均固定安装有支撑型承重连接销34,支撑型承重连接销34铰接在相邻的筒型传动清洁辅助机构1外壁,第一起翘型插接板32与第二起翘型插接板33的一端均通过螺栓固定安装有限位型插接框架35,限位型插接框架35的一端固定安装有斜面型支撑插板36,限位型插接框架35与相邻的斜面型支撑插板36均呈一一对应设置,弧形脚踏支撑板31的内部开设有预留型活动空槽37,预留型活动空槽37的数量设置为多个。
30.工作原理:首先取出本发明中所需的零部件,以便于进行实际安装与使用,在实际使用时,通过横置握把横杆108带动主支撑连接套筒107向下运动,主支撑连接套筒107带动对半型对应支撑套筒104与螺纹型支撑悬杆103进行旋转,使得预留型纵置滑槽116与相邻的对应型滑动插块117相互错开,对应型滑动插块117支撑在挤压型限位套环115的内壁,相邻的螺纹型支撑悬杆103与对半型对应支撑套筒104通过第一球形扭簧连接轴106卡合在螺纹型支撑悬杆103的外壁,同时螺纹型支撑悬杆103与对应型限位传动齿槽105相互啮合,螺纹型支撑悬杆103与对半型对应支撑套筒104向下运动时,螺纹型支撑悬杆103进行旋转,螺纹型支撑悬杆103通过第一对应型垂直传动齿轮109带动第二对应型垂直传动齿轮21进行旋转,第二对应型垂直传动齿轮21通过联轴型传动软轴22带动滚筒状清洁柱23进行旋转,弧形脚踏支撑板31通过支撑型承重连接销34带动第一起翘型插接板32与第二起翘型插接板33插接在搬运机器人的脚轮附近,通过翘板的原理,将脚轮翘起,通过滚筒状清洁柱23的旋转对脚轮进行清洁。
31.最后应说明的几点是:首先,在本技术的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
32.其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;
33.最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1