一种考虑质量失配的轮胎路面附着系数多模型融合估计方法
1.本发明涉及车辆控制领域,具体涉及一种考虑质量失配的轮胎路面附着系数多模型融合估计方法。
背景技术:
2.为了提高汽车的安全性,许多主动安全技术被开发出来以减少交通事故,如主动避撞系统、车身稳定系统。这些系统的有效实施直接受轮胎路面附着系数等关键信息的影响。然而,轮胎路面附着系数无法通过车载传感器直接测量。因此,一些基于状态观测器的估计方法被用来解决该问题。但传统估计方法中一个基本前提是车辆模型中质量参数精确已知且驾驶操纵相对简单。
3.但是,它忽略了一些实际的工作条件,车辆空载满载时质量差异明显,一些复杂驾驶操纵也较为常见,这种情况导致现有的轮胎路面附着系数估计方法可能由于估计偏差过大并不能应用到实际中。
技术实现要素:
4.本发明要解决的技术问题:本发明的目的是为了解决现有技术中的不足,提供一种种考虑质量失配的轮胎路面附着系数多模型融合估计方法。
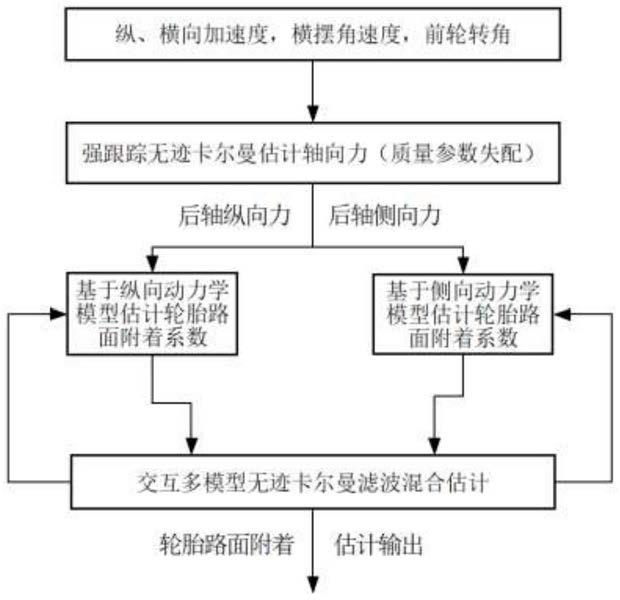
5.本发明的技术方案:车载传感器测量数据异常情况下的汽车状态估计方法,具体包括以下步骤:采集车辆纵向加速度、横向加速度、横摆角速度和前轮转角信号,与非线性车辆模型结合,利用强跟踪无迹卡尔曼滤波估计车辆轴向力信息,基于所述车辆轴向力信息利用交互多模型无迹卡尔曼估计轮胎路面附着系数;
6.所述车辆轴向力信息包括车辆前轴的纵向力和侧向力以及车辆后轴的纵向力和侧向力;
7.进一步的,利用强跟踪无迹卡尔曼滤波估计车辆轴向力信息,具体步骤如下:
8.建立非线性车身模型,
[0009][0010][0011][0012]
其中r为横摆角速度、为横摆角速度r的导数、f
yf
为前轴侧向力,f
yr
为后轴侧向力,f
xr
为后轴纵向力,f
xf
为前轴纵向力,m为汽车总质量、lf为前轴到质心的距离、lr为后轴到质心的距离、δ为前轮转角、a
x
为纵向加速度、ay为侧向加速度、iz为绕z轴的转动惯量;
[0013]
根据公式(1)~(3)建立车辆轴向力状态方程与量测方程如下:
[0014][0015]
状态变量为:
[0016]
x
η
=[f
xf,η
,f
xr,η
,f
yf,η
,f
yr,η
]
t
[0017]
量测变量为:
[0018]zη
=[r
η
,a
x,η
,a
y,η
]
t
[0019]
输入变量为:
[0020]
u=[δ]
t
[0021]
其中z为测量向量;x为状态向量;下标η表示第η个采样步长;xo表示状态向量的初值、u输入向量;f(
·
)为状态转移函数;h(
·
)输出函数;v过程噪声;w是测量噪声;
[0022]
依据所建立的方程(4)利用强跟踪估计轴向力步骤如下:
[0023]
初始化:
[0024]
其中,po表示状态估计误差协方差的初值、e表示求数学期望、(
·
)
t
表示矩阵转置;
[0025]
时间更新:协方差对应的权重均值对应的权重和sigma采样点计算如下:
[0026][0027][0028]
其中n是x的维度,λ,β,和α是待定参数;
[0029]
sigma点一步传播计算如下
[0030][0031]
通过交互与混合、预测以及融合,给出了一种可以结合多个模型的优势实现在复杂驾驶工况下轮胎路面附着系数的精确估计,提高了本发明的估计精度和适用范围更新如下:
[0032][0033][0034]
其中q是过程噪声协方差矩阵
[0035]
测量更新:新生成sigma点计算如下:
[0036][0037]
新sigma点一步传播计算如下:
[0038][0039]
的估计输出和它的协方差矩阵p
z,η
更新如下:
[0040][0041][0042]
其中,r是测量噪声的协方差矩阵;
[0043]
与的互协方差计算如下:
[0044][0045]
卡尔曼滤波增益w
η
,后验状态和它的协方差矩阵p
η
更新如下:
[0046][0047][0048][0049]
一个渐消因子σ
η
被用来动态更新先验状态协方差来应对质量参数失配的影响:
[0050][0051]
其中
[0052][0053][0054][0055][0056][0057][0058]
其中,υ
t
为根据系统状态先验信息确定的常数,r表示矩阵求迹、b
ηaη
表述公式4对x求偏导得到的矩阵,q
η
是过程噪声的协方差矩阵,vn中的z
η
是传感器的实时测量量组成的矩阵;ρ∈[0,1]就是遗忘因子、d
η
为待定参数。
[0059]
进一步的,所述轮胎路面附着系数估计具体步骤如下:
[0060]
选择后轴纵向力和侧向力分别建立纵向和侧向两个方向上的状态和测量方程,利用交互多模型无迹卡尔曼滤波对两个方向上的轮胎路面附着系数进行融合估计,具体步骤
如下:
[0061]
两个方向路面附着系数估计状态空间模型如下:
[0062][0063][0064][0065][0066]
其中j
η
是过程噪声、θ
η
是测量噪声、γ表示待估计的附着系数,上标1表是是基于纵向力模型估算的,上标2表是基于侧向动力学模型估算的;
[0067]fx
是后轴名义纵向力,fy是后轴名义侧向力,具体根据如下准静态轮胎模型计算
[0068][0069][0070]
式中,函数
[0071]
变量
[0072]
其中v
x
为纵向速度,λ为后轮平均滑移率,μ为路面附着系数,c
x
轮胎纵向刚度,cy轮胎侧偏刚度,ε速度影响因子,f
zr
后轴总的垂向力,α为后轮平均侧偏角。
[0073]
进一步的,为了实现不同纵向模型和侧向模型估计融合,设定和是基于纵向或横向动力学模型在采样η-1时刻的估计附着系数的平均值和协方差;
[0074]
ξ
η-1
是不同估计模型在同一时刻的权重系数向量;
[0075]
和是两个模型交互和混合后估计结果的均值和协方差;是交互和混合后的权重系数向量;
[0076]
和为不同模型基于无迹卡尔曼方法估计的均值和协方差;
[0077]
和ξ
η
分别为最终估计结果的均值、协方差、权重;
[0078]
交互多模型方法结合了基于纵向动态的估计模型(m1)和基于横向动态的估计模型(m2);因此,该系统是由两个模型组成的离散集;
[0079]
m={m1,m2}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(32)
[0080]
假设两个模型之间概率转移矩阵为
[0081]
[0082][0083]
其中p
ij
是从估计模型i到估计模型j的过渡概率。
[0084]
进一步的,所述实现不同纵向模型和侧向模型估计融合,具体步骤如下:
[0085]
步骤一:交互与混合
[0086]
将在采样η-1时刻各模型的估计结果与混合权重相结合,混合权重和混合概率ρj计算如下
[0087][0088][0089]
模型混合后的均值和方差如下
[0090][0091][0092]
步骤二:预测
[0093]
基于步骤一混合后的均值和方差,每个模型i使用第二步的公式5-18在采样时刻
η
进行各自的均值和协方差每个模型在
η
时刻的似然概率计算如下
[0094][0095]
其中的新息序列和新息方差如下
[0096][0097][0098]
每个模型i在采样时刻
η
的最新概率如下
[0099][0100][0101]
步骤三:融合
[0102]
最终预测的轮胎路面附着系数均值和方差如下
[0103][0104][0105]
上述三个步骤依次循环完成多模型融合估计。
[0106]
通过以上技术方案,相对于现有技术,本发明具有以下有益效果:
[0107]
1.本发明考虑到现有汽车轴向力估计中尚未考虑质量参数失配的影响,利用强跟踪理论,通过交互与混合、预测以及融合,给出了一种可以结合多个模型的优势实现在复杂驾驶工况下轮胎路面附着系数的精确估计,然后对后验状态和它的协方差矩阵p
η
更新,采用先验与后验相结合的估计方法,可以填补当前质量失配情况下汽车轴向力无法精确估计的技术空白;
[0108]
2.本发明建立的多模型融合方法,通过交互与混合、预测以及融合,给出了一种可以结合多个模型的优势实现在复杂驾驶工况下轮胎路面附着系数的精确估计,提高了本发明的估计精度和适用范围。
附图说明
[0109]
下面结合附图和实施例对本发明进一步说明。
[0110]
图1是本发明的优选实施例一种考虑质量失配的轮胎路面附着系数多模型融合估计方法系统结构示意图与实施方法。
具体实施方式
[0111]
现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
[0112]
实施例1:
[0113]
如图1所示,
[0114]
本发明首先利用车载传感器获得纵、横向加速度、横摆角速度和前轮转角信号,利用这些信息与非线性车辆模型结合利用强跟踪无迹卡尔曼滤波估计车辆前后轴的纵向和侧向力,基于车辆轴向力信息利用交互多模型无迹卡尔曼估计轮胎路面附着系数。
[0115]
基于该系统结构具体实施方法包括以下步骤:
[0116]
第一步:通过安装在汽车上的陀螺仪获取纵、横向加速度与横摆角速度,以及通过前轮转角传感器获得前轮转角信息;
[0117]
第二步:建立非线性车身模型,
[0118][0119][0120][0121]
其中r为横摆角速度、f
yf
为前轴侧向力,f
yr
为后轴侧向力,f
xr
为后轴纵向力,f
xf
为前轴纵向力,m为汽车总质量、lf为前轴到质心的距离、lr为后轴到质心的距离、δ为前轮转角、a
x
为纵向加速度、ay为侧向加速度、iz为绕z轴的转动惯量。
[0122]
根据公式(1)~(3)建立车辆轴向力状态方程与量测方程如下:
[0123][0124]
状态变量为:
[0125]
x
η
=[f
xf,η
,f
xr,η
,f
yf,η
,f
yr,η
]
t
[0126]
量测变量为:
[0127]zη
=[r
η
,a
x,η
,a
y,η
]
t
[0128]
输入变量为:
[0129]
u=[δ]
t
[0130]
其中z为测量向量;x为状态向量;u输入向量;f(
·
)为状态转移函数;h(
·
)输出函数。v过程噪声;w是测量噪声;下标η表示第η个采样步长。依据所建立的方程(4)利用强跟踪估计轴向力步骤如下:
[0131]
初始化:
[0132][0133]
时间更新:相关权重和sigma采样点计算如下:
[0134][0135][0136]
其中n是x的维度,λ,β,和α是待定参数。
[0137]
sigma点一步传播计算如下
[0138][0139]
先验状态和相应的状态协方差p
η/η-1
更新如下:
[0140][0141][0142]
其中q是过程噪声协方差矩阵
[0143]
测量更新:新生成sigma点计算如下:
[0144][0145]
新sigma点一步传播计算如下
[0146][0147]
的估计输出和它的协方差矩阵p
z,η
更新如下:
[0148][0149][0150]
r是测量噪声的协方差矩阵,与的互协方差计算如下:
[0151][0152]
卡尔曼滤波增益w
η
,后验状态和它的协方差矩阵p
η
更新如下:
[0153][0154][0155][0156]
一个渐消因子σ
η
被用来动态更新先验状态协方差来应对质量参数失配的影响:
[0157][0158]
其中
[0159][0160][0161][0162][0163][0164][0165]
其中,υ
t
为根据系统状态先验信息确定的常数,ρ∈[0,1]就是遗忘因子。d
η
为待定参数。
[0166]
第三步:选择后轴纵向力和侧向力分别建立纵向和侧向两个方向上的状态和测量方程,利用交互多模型无迹卡尔曼滤波对两个方向上的轮胎路面附着系数进行融合估计,具体步骤如下:
[0167]
两个方向路面附着系数估计状态空间模型如下:
[0168][0169]
[0170][0171][0172]
其中j
η
是过程噪声θ
η
是测量噪声.γ表示待估计的附着系数,上标1表是是基于纵向力模型估算的,上标2表是基于侧向动力学模型估算的。f
x
是后轴名义纵向力,fy是后轴名义侧向力,具体根据如下准静态轮胎模型计算
[0173][0174][0175]
式中,函数
[0176]
变量
[0177]
其中v
x
为纵向速度,λ为后轮平均滑移率,μ为路面附着系数,c
x
轮胎纵向刚度,cy轮胎侧偏刚度,ε速度影响因子,f
zr
后轴总的垂向力,α为后轮平均侧偏角。
[0178]
为了实现不同纵向模型和侧向模型估计融合,设定和是基于纵向动力学模型或横向动力学模型在采样η-1时刻的估计附着系数的平均值和协方差;ξ
η-1
是不同估计模型在同一时刻的权重系数向量。和是两个模型交互和混合后估计结果的均值和协方差。是交互和混合后的权重系数向量。和为不同模型基于无迹卡尔曼方法估计的均值和协方差。和ξ
η
分别为最终估计结果的均值、协方差、权重。交互多模型方法结合了基于纵向动态的估计模型(m1)和基于横向动态的估计模型(m2)。因此,该系统是由两个模型组成的离散集。
[0179]
m={m1,m2}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(32)
[0180]
假设两个模型之间概率转移矩阵为
[0181][0182][0183]
其中p
ij
是从估计模型i到估计模型j的过渡概率。具体步骤如下:
[0184]
步骤一:交互与混合
[0185]
将在采样η-1
时刻各模型的估计结果与混合权重相结合,混合权重和混合概率ρj计算如下
[0186]
[0187][0188]
模型混合后的均值和方差如下
[0189][0190][0191]
步骤二:预测
[0192]
基于步骤一混合后的均值和方差,每个模型i使用第二步的公式5-18在采样时刻
η
进行各自的均值和协方差每个模型在
η
时刻的似然概率计算如下
[0193][0194]
其中的新息序列和新息方差如下
[0195][0196][0197]
每个模型i在采样时刻η的最新概率如下
[0198][0199][0200]
步骤三:融合
[0201]
最终预测的轮胎路面附着系数均值和方差如下
[0202][0203][0204]
上述三个步骤依次循环完成多模型融合估计。
[0205]
以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1