车辆扭矩的控制系统及其控制方法与流程
1.本发明实施例涉及汽车控制技术领域,尤其涉及一种车辆扭矩的控制系统及其控制方法。
背景技术:
2.随着能源的日益紧张及对大气防治的严格要求,电动汽车成为当前汽车发展的主要方向。与传统汽车相比,电动汽车在驱动电机扭矩时的响应更为灵敏,为了获得更好的驾驶感受,电机扭矩的控制技术已经成为电动汽车控制技术领域的一个重要研究部分。
3.与传统汽车相似,电动汽车通过各种传感器的输入与系统当前状态及汽车工况等条件计算出驾驶员需要的电机扭矩,然后通过扭矩滤波保证发送到电机的控制扭矩无突变和毛刺,由此确保汽车的安全、合理与舒适地运行。但是,在电动汽车通过坏路或减速带时,由于地面的不平整或传动系齿轮间隙,变速箱轴和电机轴会有扭振发生,这就会将轮胎的抖动传递到电机输出轴,从而被驾驶员感知到,降低了驾驶乐趣。
4.需要说明的是,在驾驶过程中,汽车工况与路面状况强相关,具有不可预知、很难重复等特点,而传统的扭矩滤波只是在加速减速动态工况下被激活,并且电机扭矩需要经历一段时间之后才能达到预期的变化,这无法快速地弥补这种轮胎抖动带来的影响。
技术实现要素:
5.本发明实施例提供了一种车辆扭矩的控制系统及其控制方法,以实现车辆纵向加速度信号的平稳变化,弥补因轮胎抖动而带来的驾驶影响。
6.第一方面,本发明实施例提供了一种车辆扭矩的控制系统,可以包括:使能判断电路,侦测车辆的使能判断信号,并根据接收到的使能判断信号生成使能判断结果;扭矩计算电路,与使能判断电路通信连接,接收使能判断结果,并根据使能判断结果计算主动阻尼控制扭矩;扭矩控制电路,与扭矩计算电路通信连接,接收原始扭矩和主动阻尼控制扭矩,根据主动阻尼控制扭矩对原始扭矩进行调整,基于调整结果控制车辆扭矩。
7.可选的,扭矩计算电路,可以包括:第一扭矩计算电路,接收使能判断结果,若使能判断结果是使能状态,计算主动阻尼控制扭矩;第二扭矩计算电路,接收使能判断结果,若使能判断结果是未使能状态,主动阻尼控制扭矩置0。进一步的,第一扭矩计算电路,可以包括:参数侦测电路,若使能判断结果是使能状态,侦测车辆的扭矩计算参数,其中,扭矩计算参数包括转动惯量和质量,以及,电机输出轴转速和变速箱输入轴转速的速度差值;参数计算电路,与参数侦测电路通信连接,接收扭矩计算参数,并根据扭矩计算参数计算主动阻尼控制扭矩。
8.可选的,扭矩控制电路,可以包括:原始扭矩计算电路,根据传感器输出、系统当前状态和车辆工况,计算原始扭矩,其中,原始扭矩是经过滤波处理后的扭矩;扭矩调整电路,与原始扭矩计算电路和扭矩计算电路通信连接,接收主动阻尼控制扭矩和原始扭矩,并基于主动阻尼控制扭矩调整原始扭矩,得到电机控制扭矩;电机扭矩控制电路,与扭矩调整电
路通信连接,接收电机控制扭矩,并根据电机控制扭矩控制车辆上的电机扭矩。
9.可选的,通信连接可以包括电性连接或者远端连接。进一步的,远端连接可以包括蓝牙连接、wifi连接或者基站连接;和/或,电性连接可以包括can通讯;和/或,使能判断电路和扭矩控制电路设置于车辆中,扭矩计算电路设置于电子设备中,扭矩计算电路和使能判断电路远端连接,扭矩控制电路和扭矩计算电路远端连接;或者,使能判断电路、扭矩控制电路和扭矩计算电路设置于车辆中,扭矩计算电路与使能判断电路电性连接,扭矩控制电路与扭矩计算电路电性连接。
10.可选的,使能判断电路,可以包括:速度差值计算电路,侦测电机输出轴转速和变速箱输入轴转速,根据电机输出轴转速和变速箱输入轴转速计算速度差值;使能判断信号侦测电路,与速度差值计算电路通信连接,接收速度差值且侦测车辆的使能判别信号;使能判断结果生成电路,与使能判断信号侦测电路通信连接,接收速度差值和使能判别信号,并将速度差值和使能判别信号与预设的使能判断条件进行比较,生成使能判断结果。进一步的,速度差值计算电路,可以包括:变速箱输入轴转速计算电路,侦测车速信号和传动系数比,根据车速信号和传动系数比计算变速箱输入轴转速;第一速度差值计算电路,与变速箱输入轴转速计算电路通信连接,接收变速箱输入轴转速且侦测电机输出轴转速,根据电机输出轴转速和变速箱输入轴转速计算速度差值。和/或,使能判断信号侦测电路,可以包括:速度差值侦测电路,侦测车辆的电机输出轴转速和变速箱输入轴转速的速度差值;相应的,使能判断结果生成电路,可以包括:速度差值比较电路,接收预设速度差值阈值和速度差值,若速度差值大于预设速度差值阈值,使能判断结果为使能状态。
11.可选的,使能判别信号可以包括下述中的至少一个:当前变速箱离合器状态、加速度信号、车速信号、变速箱类型和原始扭矩。和/或,使能判断信号侦测电路,可以包括:第一can通讯电路,侦测当前变速箱离合器状态;相应的,使能判断结果生成电路,可以包括:当前变速箱离合器状态判断电路,接收当前变速箱离合器状态,若当前变速箱离合器状态是打磨状态或是结合状态,使能判断结果为使能状态。和/或,使能判断信号侦测电路,可以包括:加速度传感器,侦测车辆的加速度信号;相应的,使能判断结果生成电路,可以包括:加速度信号比较电路,接收预设加速度阈值和加速度信号,若加速度信号大于预设加速度阈值,使能判断结果为使能状态。和/或,使能判断信号侦测电路,可以包括:车速传感器,侦测车辆的车速信号;相应的,使能判断结果生成电路,包括:车速信号比较电路,接收预设车速阈值和车速信号,若车速信号大于预设车速阈值,使能判断结果为使能状态。和/或,使能判断信号侦测电路,可以包括:第二can通讯电路,侦测车辆的变速箱类型;相应的,使能判断结果生成电路,可以包括:变速箱类型判断电路,接收变速箱类型,若变速箱类型为mt、dct或是amt,使能判断结果为使能状态。和/或,使能判断信号侦测电路,可以包括:原始扭矩侦测电路,侦测车辆的原始扭矩;相应的,使能判断结果生成电路,包括:原始扭矩比较电路,接收预设扭矩阈值和原始扭矩,若原始扭矩小于预设扭矩阈值,使能判断结果为使能状态。
12.第二方面,本发明实施例还提供了一种车辆扭矩的控制方法,可以包括:获取车辆的使能判断信号,并根据使能判断信号生成使能判断结果;根据使能判断结果计算主动阻尼控制扭矩;获取车辆的原始扭矩,根据主动阻尼控制扭矩调整原始扭矩,并基于调整结果控制车辆扭矩。
13.可选的,根据使能判断结果计算主动阻尼控制扭矩,可以包括:若使能判断结果是
使能状态,计算主动阻尼控制扭矩;若使能判断结果是未使能状态,主动阻尼控制扭矩置0。进一步的,若使能判断结果是使能状态,计算主动阻尼控制扭矩,可以包括:若使能判断结果是使能状态,获取车辆的扭矩计算参数,扭矩计算参数包括转动惯量和质量,以及,电机输出轴转速和变速箱输入轴转速的速度差值;根据扭矩计算参数计算主动阻尼控制扭矩。进一步的,根据扭矩计算参数计算主动阻尼控制扭矩,可以包括:基于主动阻尼控制扭矩计算公式计算主动阻尼控制扭矩,其中,主动阻尼控制扭矩计算公式可以包括:
[0014][0015]
其中,f
anti jerk
为主动阻尼控制扭矩,k为系数,,为转动惯量,m为质量,δn为电机输出轴转速和变速箱输入轴转速的速度差值。进一步的,可以根据如下公式计算电机输出轴转速和变速箱输入轴转速的速度差值:
[0016][0017]
其中,n
motor
为电机输出轴转速,v为车速信号,i0为主减速比,i
g
为变速箱速比,r为轮胎半径。
[0018]
可选的,获取车辆的原始扭矩,根据主动阻尼控制扭矩调整原始扭矩,并基于调整结果控制车辆扭矩,包括:根据传感器输出、系统当前状态和车辆工况,计算原始扭矩,其中,原始扭矩是经过滤波处理后的扭矩;基于主动阻尼控制扭矩调整原始扭矩,得到电机控制扭矩;根据电机控制扭矩控制车辆上的电机扭矩。
[0019]
本发明实施例的技术方案,通过使能判断电路侦测车辆的使能判断信号,并根据接收到的使能判断信号生成使能判断结果,这使能判断结果可以用于判断车辆是否需要进入主动阻尼控制模式;通过与使能判断电路通信连接的扭矩计算电路接收使能判断结果,并根据使能判断结果计算主动阻尼控制扭矩,这是因为进入或是未进入主动阻尼控制模式时对应不同的计算方式;进而,通过与扭矩计算电路通信连接的扭矩控制电路接收原始扭矩和主动阻尼控制扭矩,根据主动阻尼控制扭矩对原始扭矩进行调整,并基于调整结果控制车辆扭矩。上述技术方案,可以根据主动阻尼控制扭矩对原始扭矩进行额外的调整,即根据扭矩信号的变化趋势对原始扭矩进行额外的调整,由此实现车辆的纵向加速度信号的平稳变化,弥补转速信号和加速度信号的突变,降低因轮胎抖动而带来的驾驶影响,这样一来,即使遇到不平整的路面,依然可以实现车辆的舒适且平稳的行驶。
附图说明
[0020]
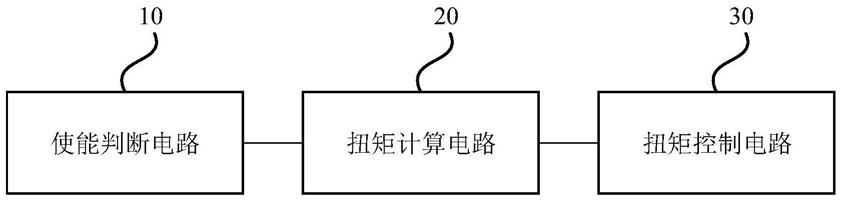
图1是本发明实施例中的一种车辆扭矩的控制系统的结构示意图;
[0021]
图2是本发明实施例中的另一种车辆扭矩的控制系统的结构示意图;
[0022]
图3是本发明实施例中的另一种车辆扭矩的控制系统的结构示意图;
[0023]
图4是本发明实施例中的一种车辆扭矩的控制系统中的第一种工作示意图;
[0024]
图5是本发明实施例中的一种车辆扭矩的控制系统中的第二种工作示意图;
[0025]
图6为本发明实施例中的一种车辆扭矩的控制方法的流程示意图;
[0026]
图7为本发明实施例中的另一种车辆扭矩的控制方法的流程示意图。
具体实施方式
[0027]
下面结合附图和实施例对本发明作进一步详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
[0028]
图1是本发明实施例中提供的一种车辆扭矩的控制系统的结构示意图。本实施例可适用于根据路面状况控制车辆扭矩的情况,尤其适用于根据路面状况调整电动汽车的电机控制扭矩的情况。参见图1,本发明实施例的车辆扭矩的控制系统,具体可以包括:使能判断电路10,侦测车辆的使能判断信号,并根据接收到的使能判断信号生成使能判断结果;扭矩计算电路20,与使能判断电路10通信连接,接收使能判断结果,并根据使能判断结果计算主动阻尼控制扭矩;扭矩控制电路30,与扭矩计算电路20通信连接,接收原始扭矩和主动阻尼控制扭矩,根据主动阻尼控制扭矩对原始扭矩的调整结果控制车辆扭矩。
[0029]
其中,使能判断电路10可以侦测车辆的使能判断信号,这些使能判断信号可以用于判断车辆是否正在通过坏路或是减速带,这是因为,当车辆通过坏路或是减速带时,车辆轮胎多会出现抖动现象,这种轮胎抖动现象就会造成使能判断信号的变化。可选的,使能判断信号可以是电机输出轴转速和变速箱输入轴转速的速度差值,还可以是当前变速箱离合器状态、加速度信号、车速信号、变速箱类型和原始扭矩中的至少一个。
[0030]
进一步,使能判断电路10根据接收到的使能判断信号可以生成使能判断结果,这使能判断结果可以用于确定车辆是否进入主动阻尼控制模式,比如,如果使能判断结果是使能状态,则进入主动阻尼控制模式;如果使能判断结果是未使能状态,则保持现有模式。或者,可以换个角度理解,使能判断结果可以通过true或是false表示,比如,如果根据使能判断信号确定需要激活使能条件,则将使能条件置true,即使能判断结果为true;如果根据使能判断信号确定无需激活使能条件,则将使能条件至false,即使能判断结果为false。
[0031]
需要说明的是,使能判断电路设置的意义在于,可以根据使能判断信号实时判断车辆是否需要进入主动阻尼控制模式,主动阻尼控制模式并非是车辆中经常使用的通过各种传感器的输入与系统当前状态及汽车工况等条件来控制车辆扭矩的模式,这样的车辆扭矩可以称为原始扭矩,而是根据车辆的扭矩计算参数计算出主动阻尼控制扭矩,并基于主动阻尼控制扭矩对原始扭矩进行调整的模式。这样一来,可以根据路面状况及时对原始扭矩进行调整,由此改善因较差的路面状况而带来的轮胎抖动的影响,提高驾驶员的驾驶乐趣。
[0032]
其中,扭矩计算电路20可以与使能判断电路10通信连接,它可以接收到使能判断电路10发送的使能判断结果,并根据使能判断结果计算主动阻尼控制扭矩。具体的,正如上文所述,根据使能判断结果可以判断车辆是否进入主动阻尼控制模式,这将直接影响到扭矩计算电路20的计算结果。示例性的,若进入主动阻尼控制模式,则可以根据车辆的扭矩计算参数计算主动阻尼控制扭矩,可选的,扭矩计算参数可以是转动惯量、质量、电机输出轴转速和变速箱输入轴转速的速度差值等等;若未进入主动阻尼控制模式,则扭矩计算电路20输出的主动阻尼控制扭矩可以直接设置为0,因为此时的原始扭矩不需要进行调整。
[0033]
需要说明的是,上文所述的通信连接可以包括电性连接或者远端连接。进一步的,远端连接可以包括蓝牙连接、wifi连接或者基站连接,而电性连接可以包括can通讯,这都可以根据实际情况进行设置。示例性的,若使能判断电路10设置于车辆中,扭矩计算电路20
设置于电子设备中,则扭矩计算电路20和使能判断电路10可以远端连接;若使能判断电路10和扭矩控制电路30都设置于车辆中,则使能判断电路10和扭矩控制电路30可以电性连接。
[0034]
其中,扭矩控制电路30可以与扭矩计算电路20通信连接,它可以接收到原始扭矩,以及,扭矩计算电路20发送的主动阻尼控制扭矩,进而,根据主动阻尼控制扭矩对原始扭矩进行调整,并基于调整结果控制车辆扭矩,比如,可以将主动阻尼控制扭矩作为反向修正,增加到滤波后的原始扭矩上以得到电机控制扭矩,进而,将电机控制扭矩发送到总线系统(controller area network,can)上,由此实现车辆电机的调速控制。
[0035]
在此基础上,一种可选的方案,扭矩控制电路30具体可以包括原始扭矩计算电路、扭矩调整电路和电机扭矩控制电路。其中,原始扭矩计算电路可以根据传感器输出、系统当前状态和车辆工况,计算出理想的驾驶员需要的原始扭矩,其中,原始扭矩是经过滤波处理后的扭矩,这可以消除原始扭矩中的突变和毛刺,滤波后的原始扭矩更可以确保车辆的安全、合理与舒适地运行。相应的,扭矩调整电路可以与原始扭矩计算电路和扭矩计算电路20通信连接,它可以接收到原始扭矩计算电路发送的原始扭矩以及扭矩计算电路20发送的主动阻尼控制扭矩,并基于主动阻尼控制扭矩调整原始扭矩,由此得到电机控制扭矩,电机控制扭矩可以认为是一种反向扭矩,它可以用于抵消因轮胎抖动而带来的车辆上的电机扭矩的损失。相应的,电机扭矩控制电路可以与扭矩调整电路通信连接,它可以接收到扭矩调整电路发送的电机控制扭矩,并根据电机控制扭矩控制车辆上的电机扭矩,这样一来,当车辆遇到不平整的路面后,可以对滤波后的原始扭矩进行额外的反向修正,由此保证车辆的纵向加速度信号的平稳变化。
[0036]
本发明实施例的技术方案,通过使能判断电路侦测车辆的使能判断信号,并根据接收到的使能判断信号生成使能判断结果,这使能判断结果可以用于判断车辆是否需要进入主动阻尼控制模式;通过与使能判断电路通信连接的扭矩计算电路接收使能判断结果,并根据使能判断结果计算主动阻尼控制扭矩,这是因为进入或是未进入主动阻尼控制模式时对应不同的计算方式;进而,通过与扭矩计算电路通信连接的扭矩控制电路接收原始扭矩和主动阻尼控制扭矩,根据主动阻尼控制扭矩对原始扭矩进行调整,并基于调整结果控制车辆扭矩。上述技术方案,可以根据主动阻尼控制扭矩对原始扭矩进行额外的调整,即根据扭矩信号的变化趋势对原始扭矩进行额外的调整,由此实现车辆的纵向加速度信号的平稳变化,弥补转速信号和加速度信号的突变,降低因轮胎抖动而带来的驾驶影响,这样一来,即使遇到不平整的路面,依然可以实现车辆的舒适且平稳的行驶。
[0037]
需要说明的是,使能判断电路10和扭矩控制电路30可以设置于车辆中,扭矩计算电路20可以设置于电子设备中,由此,扭矩计算电路20和使能判断电路10可以远端连接,扭矩控制电路30和扭矩计算电路20也可以远端连接。或者,使能判断电路10、扭矩控制电路30和扭矩计算电路20设置于车辆中,由此,扭矩计算电路20与使能判断电路10可以电性连接,扭矩控制电路30与扭矩计算电路20可以电性连接。在此基础上,为了便于说明扭矩控制电路30和使能判断电路10的具体结构,图2和图3都是以使能判断电路10、扭矩控制电路30和扭矩计算电路20设置于车辆中为例的示意图,其并非是对车辆扭矩的控制系统的具体限定。
[0038]
图2是本发明实施例提供的另一种车辆扭矩的控制系统的结构示意图,如图2所
示,扭矩计算电路20可以包括:第一扭矩计算电路201,接收使能判断结果,若使能判断结果是使能状态,计算主动阻尼控制扭矩;第二扭矩计算电路202,接收使能判断结果,若使能判断结果是未使能状态,主动阻尼控制扭矩置0。需要说明的是,第一扭矩计算电路201和第二扭矩计算电路202的工作过程可以有多种情况:
[0039]
示例性的,无论使能判断结果是使能状态还是未使能状态,第一扭矩计算电路201都会计算主动阻尼控制扭矩并输出这主动阻尼控制扭矩,同时,第二扭矩计算电路202也会输出数值为0的主动阻尼控制扭矩。然后,根据使能判断结果从上述两个主动阻尼控制扭矩中选择一个作为最终的主动阻尼控制扭矩,比如,若是使能状态,将第一扭矩计算电路201输出的主动阻尼控制扭矩作为最终的主动阻尼控制扭矩;若是未使能状态,将第二扭矩计算电路202输出的主动阻尼控制扭矩作为最终的主动阻尼控制扭矩。或者,
[0040]
再示例性的,第一扭矩计算电路201和第二扭矩计算电路202都会接收到使能判断结果,若使能判断结果是使能状态,则第一扭矩计算电路201计算主动阻尼控制扭矩并输出这主动阻尼控制扭矩,相应的,第二扭矩计算电路202没有任何输出;若使能判断结果是未使能状态,则第二扭矩计算电路202会输出数值为0的主动阻尼控制扭矩,相应的,第一主动阻尼控制扭矩没有任何输出。或者,
[0041]
再示例性的,若使能判断结果是使能状态,此时车辆进入主动阻尼控制模式,总线系统将使能状态作为第一扭矩计算电路201的输入,则第一扭矩计算电路201将会计算主动阻尼控制扭矩并输出这主动阻尼控制扭矩;若使能判断结果是未使能状态,此时车辆未进入主动阻尼控制模式,总线系统将未使能状态作为第二扭矩计算电路202的输入,则第二扭矩计算电路202会输出数值为0的主动阻尼控制扭矩。
[0042]
这样设置的好处在于,扭矩计算电路以使能判断结果为依据,通过不同的计算方式计算主动阻尼控制扭矩,这样一来,若车辆遇到不平整路况,比如坏路和/或减速带,可以根据第一扭矩计算电路输出的主动阻尼控制扭矩对原始扭矩进行调整;若车辆未遇到不平整路况,可以根据第二扭矩计算电路输出的主动阻尼控制扭矩对原始扭矩进行调整,此时相当于未对原始扭矩进行调整,即在任何路况下,都可以保证车辆的纵向加速度信号的平稳变化,进而保证车辆的平稳运行。
[0043]
在此基础上,可选的,第一扭矩计算电路201可以包括参数侦测电路和参数计算电路,其中,若使能判断结果是使能状态,参数侦测电路可以侦测车辆的扭矩计算参数,并将扭矩计算参数发送到与其通信连接的参数计算电路,其中,扭矩计算参数可以包括转动惯量和质量,以及,电机输出轴转速和变速箱输入轴转速的速度差值。进一步,参数计算电路根据接收到的扭矩计算参数可以计算主动阻尼控制扭矩,参数计算电路的具体结构与主动阻尼控制扭矩的计算方式有关,比如,如果是基于主动阻尼控制扭矩计算公式计算主动阻尼控制扭矩,则可以根据主动阻尼控制扭矩计算公式中各个扭矩计算参数之间的运算关系确定参数计算电路的具体结构,以及,每个具体结构的输入输出,例如,这参数计算电路可以是由一个或是多个加法器、逻辑器和比较器构成。
[0044]
需要说明的是,在汽车控制技术领域并未存在主动阻尼控制扭矩计算公式,经过研究认为,它可以通过无量纲数学表达进行推导。具体的,当扭矩计算参数包括转动惯量和质量,以及,电机输出轴转速和变速箱输入轴转速的速度差值时,主动阻尼控制扭矩可以表示为:
[0045]
f
anti jerk
=f(i,m,δn)=k*i
a
*m
b
*δn
c
[0046]
其中,f
anti jerk
为主动阻尼控制扭矩,k、a、b和c为系数,m为包括含旋转部件质量换算部分的单位为kg的质量,i为单位为kgm2的转动惯量,δn为电机输出轴转速和变速箱输入轴转速的速度差值。若基于无量纲数学分析上述表达式,展开后的表达式可以是:
[0047]
m*l*t
‑2=(m*l2)
a
*m
b
*t
‑
c
[0048]
由此得到c=2,因此,主动阻尼控制扭矩计算公式可以表示为:
[0049][0050]
其中,λ(δn)是与δn相关的函数,这需要对整车进行标定方能得到。
[0051]
在此基础上,可选的,可以根据如下公式计算电机输出轴转速和变速箱输入轴转速的速度差值δn:
[0052][0053]
其中,n
motor
为电机输出轴转速,v为车速信号,i0为主减速比,i
g
为变速箱速比,r为轮胎半径。
[0054]
图3是本发明实施例提供的另一种车辆扭矩的控制系统的结构示意图,如图3所示,使能判断电路10可以包括速度差值计算电路101、使能判断信号侦测电路102和使能判断结果生成电路103,其中,速度差值计算电路101可以根据侦测到的电机输出轴转速和变速箱输入轴转速计算速度差值,比如,使能判断电路10可以是减法器、差值电路等等;使能判断信号侦测电路102,与速度差值计算电路101通信连接,可以接收速度差值计算电路101发送的速度差值,以及,侦测车辆的使能判别信号,可选的,使能判别信号可以包括当前变速箱离合器状态、加速度信号、车速信号、变速箱类型和原始扭矩中的至少一个;使能判断结果生成电路103,与使能判断信号侦测电路102通信连接,可以接收使能判断信号侦测电路102发送的速度差值和使能判别信号,并将速度差值和使能判别信号与预设的使能判断条件进行比较,生成使能判断结果,比如,使能判断结果生成电路103可以是比较器、逻辑门等等。
[0055]
这样设置的原因在于,一方面,在车辆通过坏路或是减速带时,地面的不平整或传动系齿轮间隙都有可能导致变速箱输入轴和电机输出轴发生扭振,因此,根据电机输出轴转速和变速箱输入轴转速计算得到的速度差值是使能判断时的参考因素;另一方面,上述使能判别信号是当前各主流动力总成的配置,可以基于不同的车辆配置选择其中的一个或多个作为参考因素,即可以基于不同的车辆配置选择打开或关闭某些参考因素的接收通道。这样一来,由此得到的使能判断结果可以准确判断出是否需要对原始扭矩进行调整,由此确保车辆的安全、合理与舒适地运行。
[0056]
在此基础上,进一步的,速度差值计算电路101可以包括变速箱输入轴转速计算电路,侦测车速信号和传动系数比,根据车速信号和传动系数比计算变速箱输入轴转速;第一速度差值计算电路101,与变速箱输入轴转速计算电路通信连接,可以接收变速箱输入轴转速计算电路输出的变速箱输入轴转速且侦测电机输出轴转速,这样一来,可以根据电机输出轴转速和变速箱输入轴转速计算二者的速度差值。
[0057]
一种可选的方案,使能判断信号侦测电路102可以包括:速度差值侦测电路,侦测车辆的电机输出轴转速和变速箱输入轴转速的速度差值;相应的,使能判断结果生成电路103可以包括:速度差值比较电路,与速度差值侦测电路通信连接,接收预设速度差值阈值和速度差值侦测电路发送的速度差值,对预设速度差值阈值和速度差值的大小进行比较,若速度差值大于预设速度差值阈值,使能判断结果为使能状态,反之则为未使能状态。此时,速度差值可以表示转速信号的变化趋势和梯度,当速度差值大于预设速度差值阈值时,说明此时车辆轮胎突发抖动,应当将使能判断结果置为使能状态,由此进入主动阻尼控制模式。
[0058]
一种可选的方案,使能判断信号侦测电路102可以包括:第一can通讯电路,侦测当前变速箱离合器状态;相应的,使能判断结果生成电路103可以包括:当前变速箱离合器状态判断电路,与第一can通讯电路通信连接,接收第一can通讯电路发送的当前变速箱离合器状态,若当前变速箱离合器状态是打磨状态或是结合状态,使能判断结果为使能状态。
[0059]
一种可选的方案,使能判断信号侦测电路102可包括:加速度传感器,侦测车辆的加速度信号;相应的,使能判断结果生成电路103可以包括:加速度信号比较电路,与加速度传感器通信连接,接收预设加速度阈值和加速度传感器发送的加速度信号,对预设加速度阈值和加速度信号的大小进行比较,若加速度信号大于预设加速度阈值,使能判断结果为使能状态,反之为未使能状态。
[0060]
一种可选的方案,使能判断信号侦测电路102可以包括:车速传感器,侦测车辆的车速信号;相应的,使能判断结果生成电路103可以包括:车速信号比较电路,与车速传感器通信连接,接收预设车速阈值和车速传感器发送的车速信号,比较预设车速阈值和车速信号的大小,若车速信号大于预设车速阈值,使能判断结果为使能状态,反之则未使能状态。此时,检测车速信号的变化趋势和梯度,当速度差值大于预设车速阈值时,说明此时车辆轮胎突发抖动,应当将使能判断结果置为使能状态,由此进入主动阻尼控制模式。
[0061]
一种可选的方案,使能判断信号侦测电路102可以包括:第二can通讯电路,侦测车辆的变速箱类型;相应的,使能判断结果生成电路103可以包括:变速箱类型判断电路,与第二can通讯电路通信连接,接收第二can通讯电路发送的变速箱类型,若变速箱类型为mt、dct或是amt,使能判断结果为使能状态;反之则为未使能状态。
[0062]
一种可选的方案,使能判断信号侦测电路102可以包括:原始扭矩侦测电路,侦测车辆的原始扭矩;相应的,使能判断结果生成电路103可以包括:原始扭矩比较电路,与原始扭矩侦测电路通信连接,接收预设扭矩阈值和原始扭矩侦测电路发送的原始扭矩,比较预设扭矩阈值和原始扭矩的大小,若原始扭矩小于预设扭矩阈值,使能判断结果为使能状态,反之则为未使能状态。
[0063]
为了更好地理解上述电路的具体工作过程,下面结合具体示例对本实施例的车辆扭矩的控制系统进行示例性的说明。示例性的,参见图4,车辆中经硬件输入单元(hardware input unit)输入的信号可以包括车速信号(vehicle velocity)和纵向加速度信号(longitude acceleration),具体的,它们可以通过各种传感器得到;经can信号接收单元(can messages receiving unit)接收的信号可以包括电机输出轴转速(motor speed)和当前变速箱离合器状态(clutch status),这些硬件输入信号和can接收信号都可以直接输入至输入总线(inputs bus)中。
[0064]
再示例性的,参见图5,通过输入总线可以获取到纵向加速度信号、当前变速箱离合器状态、电机输出轴转速和车速信号,同时,通过原始扭矩输出单元(filtered torque output unit)可以获取到原始扭矩;进一步,将原始扭矩、纵向加速度信号、当前变速箱离合器状态、电机输出轴转速和车速信号输入至使能条件输出单元(enable condition output unit)可以得到使能条件,该使能条件就是使能判断结果,将使能判断结果输入至multiport switch,这就是使能判断电路10的工作示意图。在此基础上,将车速信号和电机输出轴转速输入至主动阻尼控制扭矩计算单元(anti jerk torque computing unit)可以计算出主动阻尼控制扭矩(f
anti jerk
),这就是第一扭矩计算电路201的工作示意图;与此同时,还可以经由零扭矩输出单元(zero torque output unit)直接将主动阻尼控制扭矩设置为0,这就是第二扭矩计算电路202的工作示意图。然后,将f
anti jerk
和0都将直接输入至multiport switch中。
[0065]
需要说明的是,multiport switch可以用于确定将多个输入端中的哪一个输入数据传递给输出端,其中,第一个输入数据是控制输入,其余输入数据是数据输入,它是根据控制输入来选择将哪个数据输入传递给输出端。具体的,使能判断结果是控制输入,f
anti jerk
和0是数据输入,这样一来,根据使能判断结果就可以从f
anti jerk
和0中选择一个作为最终的主动阻尼控制扭矩,并将主动阻尼控制扭矩作为反向扭矩来对原始扭矩进行调整,最后,将调整结果输入至电机输出轴转速(motor torque input unit),由此控制电机扭矩。
[0066]
本发明实施例的技术方案,将电机控制扭矩应用到电动汽车中,在检测到轮胎遇到不平整的路况时,采集电动汽车的滤波后的原始扭矩、纵向加速度信号、转速信号即速度差值、车速信号和当前变速箱离合器状态;如果检测到转速信号和车速信号的变化趋势及梯度超过预设变化阈值,则可以控制电动汽车进入主动阻尼控制模式;在主动阻尼控制模式下,可以对滤波后的原始扭矩进行额外的反向修正,即转速正偏则减扭,转速反偏则增扭。上述技术方案,可以弥补转速信号和加速度信号的突变,降低因轮胎抖动而带来的驾驶影响,这样一来,可以提高驾驶员的驾驶乐趣并改善乘客的舒适性,而且,还可以提高电机及传动系的耐久表现。
[0067]
本发明实施例还提供了一种车辆扭矩的控制方法,该车辆扭矩的控制方法可以由上述实施例的车辆扭矩的控制系统执行,图6为本发明实施例提供的一种车辆扭矩的控制方法的流程示意图,参见图6,本发明实施例的方法具体可以包括如下步骤:
[0068]
s110、获取车辆的使能判断信号,并根据使能判断信号生成使能判断结果。
[0069]
其中,使能判断信号可以用于判断车辆是否正在通过坏路或是减速带,这是因为,当车辆通过坏路或是减速带时,车辆轮胎多会出现抖动现象,这种轮胎抖动现象就会造成使能判断信号的变化。可选的,使能判断信号可以是电机输出轴转速和变速箱输入轴转速的速度差值,还可以是当前变速箱离合器状态、加速度信号、车速信号、变速箱类型和原始扭矩中的至少一个。
[0070]
进一步,根据使能判断信号可以生成使能判断结果,这使能判断结果可以用于确定车辆是否进入主动阻尼控制模式,比如,如果使能判断结果是使能状态,则进入主动阻尼控制模式;如果使能判断结果是未使能状态,则保持现有模式。或者,可以换个角度理解,使能判断结果可以通过true或是false表示,比如,如果根据使能判断信号确定需要激活使能
条件,则将使能条件置true,即使能判断结果为true;如果根据使能判断信号确定无需激活使能条件,则将使能条件至false,即使能判断结果为false。
[0071]
s120、根据使能判断结果计算主动阻尼控制扭矩。
[0072]
其中,由于使能判断结果可以判断车辆是否进入主动阻尼控制模式,这将直接影响到主动阻尼控制扭矩的计算方式。示例性的,若进入主动阻尼控制模式,则可以根据车辆的扭矩计算参数计算主动阻尼控制扭矩,可选的,扭矩计算参数可以是转动惯量、质量、电机输出轴转速和变速箱输入轴转速的速度差值等等;若未进入主动阻尼控制模式,则可以将主动阻尼控制扭矩直接设置为0,因为此时的原始扭矩不需要进行调整。
[0073]
s130、获取车辆的原始扭矩,根据主动阻尼控制扭矩调整原始扭矩,并基于调整结果控制车辆扭矩。
[0074]
其中,当根据主动阻尼控制扭矩对原始扭矩进行调整后,可以基于调整结果控制车辆扭矩,比如,可以将主动阻尼控制扭矩作为反向修正来调整滤波后的原始扭矩,进而,将调整结果发送到总线系统(controller area network,can)上,由此实现车辆电机的调速控制。
[0075]
在此基础上,可选的,根据使能判断结果计算主动阻尼控制扭矩,可以包括:若使能判断结果是使能状态,计算主动阻尼控制扭矩;若使能判断结果是未使能状态,主动阻尼控制扭矩置0。进一步的,若使能判断结果是使能状态,计算主动阻尼控制扭矩,可以包括:若使能判断结果是使能状态,获取车辆的扭矩计算参数,扭矩计算参数包括转动惯量和质量,以及,电机输出轴转速和变速箱输入轴转速的速度差值;根据扭矩计算参数计算主动阻尼控制扭矩。进一步的,根据扭矩计算参数计算主动阻尼控制扭矩,可以包括:基于主动阻尼控制扭矩计算公式计算主动阻尼控制扭矩,其中,主动阻尼控制扭矩计算公式可以包括:
[0076][0077]
其中,f
anti jerk
为主动阻尼控制扭矩,k为系数,i为转动惯量,m为质量,δn为电机输出轴转速和变速箱输入轴转速的速度差值。进一步的,可以根据如下公式计算电机输出轴转速和变速箱输入轴转速的速度差值:
[0078][0079]
其中,n
motor
为电机输出轴转速,v为车速信号,i0为主减速比,i
g
为变速箱速比,r为轮胎半径。
[0080]
可选的,获取车辆的原始扭矩,根据主动阻尼控制扭矩调整原始扭矩,并基于调整结果控制车辆扭矩,包括:根据传感器输出、系统当前状态和车辆工况,计算原始扭矩,其中,原始扭矩是经过滤波处理后的扭矩;基于主动阻尼控制扭矩调整原始扭矩,得到电机控制扭矩;根据电机控制扭矩控制车辆上的电机扭矩。
[0081]
本发明实施例的技术方案,根据车辆的使能判断信号生成使能判断结果,这使能判断结果可以用于判断车辆是否需要进入主动阻尼控制模式;根据使能判断结果计算主动阻尼控制扭矩,这是因为进入或是未进入主动阻尼控制模式时对应不同的计算方式;进而,获取车辆的原始扭矩,根据主动阻尼控制扭矩调整原始扭矩,并基于调整结果控制车辆扭矩。上述技术方案,可以根据主动阻尼控制扭矩对原始扭矩进行额外的调整,即根据扭矩信
号的变化趋势对原始扭矩进行额外的调整,由此实现车辆的纵向加速度信号的平稳变化,弥补转速信号和加速度信号的突变,降低因轮胎抖动而带来的驾驶影响,即使遇到不平整的路面,依然可以实现车辆的舒适且平稳的行驶。
[0082]
为了更好地理解上述步骤的具体实现过程,下面结合具体示例对本实施例的车辆扭矩的控制方法进行示例性的说明。示例性的,参见图7,
[0083]
首先,获取车辆的使能判断信号,使能判断信号可包括车辆的电机输出轴转速、当前变速箱离合器状态、加速度信号、车速信号、变速箱类型和原始扭矩;根据电机输出轴转速和传动系数比计算变速箱输入轴转速;根据电机输出轴转速和变速箱输入轴转速计算速度差值,并将速度差值也作为使能判断信号。
[0084]
其次,判断使能判断信号是否满足预设的使能判断条件,这使能判断条件可以包括下述中的至少一个:速度差值大于预设速度差值阈值,当前变速箱离合器状态是打磨状态或是结合状态,加速度信号大于预设加速度阈值,车速信号大于预设车速阈值,变速箱类型为mt、dct或是amt,以及,原始扭矩小于预设扭矩阈值;若满足,则使能判断结果是使能状态,即根据使能判断信号确定需要激活使能条件,将使能条件置为true;若未满足,则使能判断结果是未使能状态,即根据使能判断信号确定无需激活使能条件,将使能条件置为false。
[0085]
再次,若使能判断结果是使能状态,根据车辆的扭矩计算参数计算主动阻尼控制扭矩,其中,扭矩技术参数可以包括转动惯量、质量和速度差值,主动阻尼控制扭矩的计算公式可以包括其中,f
anti jerk
为主动阻尼控制扭矩,k为系数,i为转动惯量,m为质量,δn为电机输出轴转速和变速箱输入轴转速的速度差值,且速度差值的计算公式可以包括差值的计算公式可以包括其中,n
motor
为电机输出轴转速,v为车速信号,i0为主减速比,i
g
为变速箱速比,r为轮胎半径;相应的,若使能判断结果是未使能状态,将主动阻尼控制扭矩设置为0。
[0086]
最后,基于主动阻尼控制扭矩对原始扭矩进行调整,比如,将主动阻尼控制扭矩作为反向修正,增加到滤波处理后的原始扭矩上,由此得到电机控制扭矩;进而,将电机控制扭矩发送到总线系统(controller area network,can)上,由此实现车辆电机的调速控制。
[0087]
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1