一种具有一刹车辅助装置的交通工具的制作方法
1.本发明涉及交通工具技术领域,特别地,涉及一种具有一刹车辅助装置的交通工具。
背景技术:
2.随着生活水平的不断提升,如汽车等交通工具在人们的生活中已经越来越常见了。这些交通工具的快捷给人们提供了较多的方便。虽然现有的交通工具因为安全因素,加装了一些电控刹车系统,以避免刹车失控。然而,现有的电控刹车都属于事后启动,无法在可能失控前提前预警与提前预防,以避免可能的失控发生。
技术实现要素:
3.本发明是鉴于上述问题而完成的,一种具有一刹车辅助装置的交通工具。
4.为了解决上述问题,本发明提供一种具有一刹车辅助装置的交通工具,所述交通工具包括:一刹车接收装置,用于接收一外力,以使该交通工具进行刹车;至少一个处理器;以及储存装置,所述储存装置耦接到所述至少一个处理器并且储存多个指令,所述多个指令在由所述至少一个处理器执行时,使得所述至少一个处理器执行以下处理:取得该交通工具在一行驶路面上的一行驶数据以及该外力的一行为数据;依据该行驶数据,评估该行驶路面的一路面参数;依据该行驶数据与该行为数据中的其中一个,计算该交通工具于一第一方向的一第一减速度;依据该路面参数与该第一减速度,评估该交通工具于一第二方向的一减速度阈值,其中该第一方向与该第二方向不同;以及依据该减速度阈值,判断是否启动该交通工具的该刹车辅助装置。
5.在某一实施方式中,当该交通工具转弯时,该交通工具的该第一减速度为依据该行驶数据所产生的一离心加速度。
6.在某一实施方式中,所述多个指令在由所述至少一个处理器执行时,使得所述至少一个处理器执行以下处理:该交通工具在转弯期间进行刹车时,依据该行为数据,计算该交通工具于该第二方向的一刹车减速度;以及比较该减速度阈值与该刹车减速度,判断是否启动该交通工具的该刹车辅助装置,其中该减速度阈值为该交通工具在转弯期间进行刹车时的一刹车减速阈值。
7.在某一实施方式中,所述多个指令在由所述至少一个处理器执行时,使得所述至少一个处理器执行以下处理:依据该行驶数据中一转动数据,计算该交通工具在转弯期间的一曲率半径,其中该转动数据为该交通工具的多个转动装置的多个转动参数;以及依据该曲率半径以及该行驶数据中的一速度数据,计算该交通工具的该离心加速度,其中该速度数据为该交通工具的一行进速度。
8.在某一实施方式中,当该交通工具进行刹车时,该交通工具的该第一减速度为依据该行为数据所产生的一刹车减速度;以及该减速度阈值为该交通工具在刹车期间进行转弯时的一离心减速阈值。
9.在某一实施方式中,所述多个指令在由所述至少一个处理器执行时,使得所述至少一个处理器执行以下处理:该交通工具在刹车期间进行转弯时,依据该行驶数据,计算该交通工具于该第二方向的一离心加速度;以及比较该离心减速阈值与该离心加速度,判断是否启动该交通工具的该刹车辅助装置。
10.在某一实施方式中,所述多个指令在由所述至少一个处理器执行时,使得所述至少一个处理器执行以下处理:依据该行为数据中的一外力力量值以及一外力速度值,计算该交通工具在刹车期间的该刹车减速度。
11.在某一实施方式中,该刹车补助装置包括一刹车警示装置以及一刹车调整装置中至少一个;一刹车警示装置,用于依据该减速度阈值来发出警示讯号;以及一刹车调整装置,用于依据该减速度阈值来调整该交通工具的一刹车行为。
12.为解决上述问题,本发明还提供一种用于交通工具的刹车辅助方法,所述方法包括:取得该交通工具在一行驶路面上的一行驶数据以及施加在该交通工具的一刹车接收装置的一外力的一行为数据;依据该行驶数据,评估该行驶路面的一路面参数;依据该行驶数据与该行为数据中的其中一个,计算该交通工具于一第一方向的一第一减速度;依据该路面参数与该第一减速度,评估该交通工具于一第二方向的一减速度阈值,其中该第一方向与该第二方向不同;以及依据该减速度阈值,判断是否启动该交通工具的一刹车辅助装置。
13.在某一实施方式中,当该交通工具进行转弯时,该交通工具的该第一减速度为依据该行驶数据所产生的一离心加速度以及该减速度阈值为该交通工具在转弯期间进行刹车时的一刹车减速阈值;以及当该交通工具进行刹车时,该交通工具的该第一减速度为依据该行为数据所产生的一刹车减速度以及该减速度阈值为该交通工具在刹车期间进行转弯时的一离心减速阈值。
14.通过上述方式,能够使得该交通工具可提前推估刹车减速度与离心加速度中的至少一个,来推算减速度阈值,并通过该刹车减速度以及该离心加速度中的一个与该减速度阈值的比较,来进行提前预警,甚至提前启动刹车辅助装置,从而能够有效控制刹车以避免刹车失效。
附图说明
15.为了更清楚地说明本技术实施方式或现有技术中的技术方案,下面将对实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
16.图1是本发明一实施方式的具有一刹车辅助装置的交通工具的方框图。
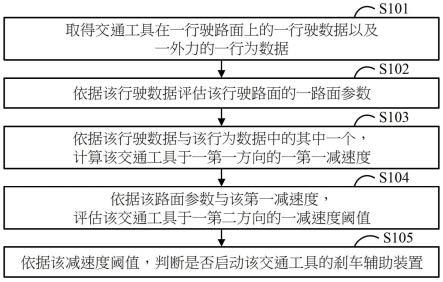
17.图2是一实施方式的交通工具中的处理器执行过程的流程图。
18.图3是另一实施方式的交通工具中的处理器执行过程的流程图。
19.图4是又一实施方式的交通工具中的处理器执行过程的流程图。
20.图5是本发明一实施方式的交通工具进行右转弯的示意图。
21.图6是又一实施方式的交通工具中的处理器执行过程的流程图。
22.图7是本发明一实施方式的交通工具进行刹车的侧向示意图。
23.图8是本发明一实施方式的交通工具进行左转弯的侧向示意图。
access memory)、只读存储器rom(read only memory)、可擦可程序设计只读存储器eprom(erasable programmable read-only memory)、电可擦可程序设计只读存储器eeprom(electrically erasable programmable read-only memory)、闪存、光盘只读存储器cd rom(compact disc read-only memory)、磁盒、磁带、磁盘存储器或任何其他能够存储计算机可读指令的等效介质。
32.本发明各装置之间的耦接可采用定制的协议或遵循现有标准或事实标准,包括但不限于以太网、ieee802.11或ieee802.15系列、无线usb或电信标准(包括但不限于gsm(global system for mobile communications,全球移动通信系统)、cdma2000(code division multiple access,码分多址技术)、td-scdma(time division-synchronization code division multiple access,时分同步的码分多址技术)、wimax(world interoperability for microwave access,全球微波接入互操作性)、3gpp-lte(long term evolution,长期演进技术)或td-lte(time division long term evolution,时分长期演进技术))。此外,本发明各装置亦可各自包括被配置为将数据传输和/或存储到计算机可读介质并且从计算机可读介质接收数据的任何设备。再者,本发明各装置可包括计算机系统接口,该计算机系统接口可以使数据能够存储在存储设备上或从存储设备接收数据。例如:本发明各装置可包括支持控制器局域网络总线(controller area network bus,can bus)、flexray、外围组件互连(peripheral component interconnec,pci)和高速外围组件互连(peripheral component interconnect express,pcie)总线协议的芯片集、专用总线协议、通用串行总线(universal serial bus,usb)协议、i2c、或任何其他可用于互连对等设备的逻辑和物理结构。
33.以下结合附图实施例对本发明作进一步详细描述。
34.请参阅图1,本发明提供一种具有一刹车辅助装置的交通工具100,交通工具100可为但不限于为汽车、摩托车、三轮车、电动车、电动摩托车、电动自行车、太阳能车、燃料电池车等,在此不作限定。交通工具100包括刹车接收装置10、多个转动装置20、刹车辅助装置30、储存装置40以及至少一个处理器50。
35.刹车接收装置10用于接收一外力以使交通工具100进行刹车。在一实施方式中,刹车接收装置10可为交通工具100的刹车踏板。在该实施方式中,交通工具100的驾驶员对该刹车踏板施加一踩踏后,刹车接收装置10接收到该踩踏所产生的外力,而启动交通工具100的刹车装置(未示出于图示)。在另一实施方式中,刹车接收装置10可为交通工具100的刹车手把。在该实施方式中,交通工具100的驾驶员对该刹车手把施加一拉力后,刹车接收装置10接收到该拉力所产生的外力,而启动交通工具100的刹车装置。
36.多个转动装置20用于移动交通工具100,在一实施方式中,多个转动装置20为交通工具100的多个轮子。在该实施方式中,该刹车装置与多个转动装置20耦接,以在交通工具100的该刹车装置启动时,降低多个转动装置20的多个转速,来降低交通工具100的行进速度。
37.刹车辅助装置30用于辅助刹车装置的运作。在一实施方式中,刹车辅助装置30可包括刹车警示装置及刹车调整装置中的至少一个。在该实施方式中,该刹车警示装置用于依据处理器50的判断结果来决定是否发出警示讯号,该刹车调整装置用于依据处理器50的判断结果来决定是否调整交通工具100的一刹车行为。
38.储存装置40耦接到至少一个处理器50并且储存多个指令,请合并参阅图1与图2,图2是交通工具100中至少一个处理器50执行过程的流程图。多个指令在由至少一个处理器50执行时,使得至少一个处理器50执行以下处理:
39.步骤s101,取得交通工具100在一行驶路面上的一行驶数据以及一外力的一行为数据。在一实施方式中,至少一个处理器50通过交通工具100上的各种感测装置(未示出于图示)来获得在该行驶路面上的该行驶数据。在一实施方式中,至少一个处理器50可通过与刹车接收装置10耦接的感测装置(未示出于图示)来获得该外力的该行为数据。
40.在本实施方式中,该行驶数据可包括多个转动装置20的该多个转速、交通工具100的该行进速度以及该行驶路面的一路面影像中的至少一个。在本实施方式中,该行为数据可包括一外力力量值、一外力速度值以及一外力频率值中的至少一个。
41.步骤s102,依据该行驶数据评估该行驶路面的一路面参数。在一实施方式中,该路面参数可为该行驶路面的一摩擦系数。在该实施方式中,该行驶数据可用于估测该行驶路面的该摩擦系数。至少一个处理器50通过与一摄影装置(未示出于图示)来获得该行驶路面的该路面影像,以作为该行驶数据来估测该行驶路面的该摩擦系数。在一实施方式中,至少一个处理器50可藉由交通工具100在先前的刹车过程中的该行进速度来估测该行驶路面的该摩擦系数。在一实施方式中,至少一个处理器50可藉由交通工具100在先前的加速过程中的该行进速度来估测该行驶路面的该摩擦系数。
42.步骤s103,依据该行驶数据与该行为数据中的其中一个,计算交通工具100于一第一方向的一第一减速度。在一实施方式中,当交通工具100进行转弯时,至少一个处理器50可藉由该行驶数据,计算交通工具100于一离心方向的一离心加速度。在该实施例中,该第一方向为该离心方向,而该第一减速度为该离心加速度。在一实施方式中,当交通工具100进行刹车时,至少一个处理器50可藉由该行为数据,计算交通工具100于一行进方向的一刹车减速度。在该实施例中,该第一方向为该行进方向,而该第一减速度为该刹车减速度。
43.步骤s104,依据该路面参数与该第一减速度,评估交通工具100于一第二方向的一减速度阈值。在本实施方式中,通过作为该路面参数的该摩擦系数可运算出该行驶路面可施加给交通工具100的一最大摩擦力,因此通过该最大摩擦力以及该第一减速度,则可判断出交通工具100于其他方向(例如:该第二方向)的减速度阈值。在一实施方式中,当交通工具100进行转弯时,至少一个处理器50可藉由该摩擦系数与该离心加速度,评估出交通工具100于该行进方向的一刹车减速阈值。在该实施方式中,该第二方向为该行进方向且该减速度阈值为交通工具100在转弯期间进行刹车时的该刹车减速阈值。在一实施方式中,当交通工具100进行刹车时,至少一个处理器50可藉由该摩擦系数与该刹车减速度,评估出交通工具100于该离心方向的一离心减速阈值。在该实施方式中,该第二方向为该离心方向且该减速度阈值为交通工具100在刹车期间进行转弯时的该离心减速阈值。
44.步骤s105,依据该减速度阈值,判断是否启动交通工具100的刹车辅助装置30。在本实施方式中,至少一个处理器50可依据交通工具100的该行驶数据与该行为数据中的另外一个,计算交通工具100于该第二方向的一第二减速度,并依据该减速度阈值以及该第二减速度,判断是否启动交通工具100的刹车辅助装置30。
45.在一实施方式中,若该减速度阈值小于或等于一预设阈值时,至少一个处理器50则可不需计算该第二减速度,直接启动交通工具100的刹车辅助装置30。在该实施方式中,
该预设阈值可等于0或0.2g。
46.在一实施方式中,交通工具100在转弯期间进行刹车时,至少一个处理器50可依据该行为数据,计算出交通工具100于该行进方向的该刹车减速度,并比较该刹车减速阈值与该刹车减速度,判断是否启动交通工具100的刹车辅助装置30。在该实施方式中,该第二方向为该行进方向,并与作为该第一方向的该离心方向不同,且该行进方向可与该离心方向垂直。在该实施方式中,该第二减速度为该刹车减速度,而该减速度阈值为该刹车减速阈值。因此,当该至少一个处理器50判断该刹车减速度大于或等于该刹车减速阈值时,该至少一个处理器50可启动交通工具100的刹车辅助装置30。在另一实施方式中,当该至少一个处理器50判断该刹车减速度小于该刹车减速阈值,且该刹车减速度与该刹车减速阈值之间的差异小于或等于一第一预设差异值时,该至少一个处理器50可启动交通工具100的刹车辅助装置30。在又一实施方式中,当该至少一个处理器50判断该刹车减速度小于该刹车减速阈值,且该刹车减速度与该刹车减速阈值之间的差异大于一第一预设差异值时,该至少一个处理器50可不启动交通工具100的刹车辅助装置30。在该实施方式中,该第一预设差异值可等于0.2g。
47.在一实施方式中,交通工具100在刹车期间进行转弯时,至少一个处理器50可依据该行驶数据,计算出交通工具100于该离心方向的该离心加速度,并比较该离心减速阈值与该离心加速度,判断是否启动交通工具100的刹车辅助装置30。在该实施方式中,该第二方向为该离心方向,并与作为该第一方向的该行进方向不同,且该离心方向可与该行进方向垂直。在该实施方式中,该第二减速度为该离心加速度,而该减速度阈值为该离心减速阈值。因此,当该至少一个处理器50判断该离心加速度大于或等于该离心减速阈值时,该至少一个处理器50可启动交通工具100的刹车辅助装置30。在另一实施方式中,当该至少一个处理器50判断该离心加速度小于该离心减速阈值,且该离心加速度与该离心减速阈值之间的差异小于或等于一第二预设差异值时,该至少一个处理器50可启动交通工具100的刹车辅助装置30。在又一实施方式中,当该至少一个处理器50判断该离心加速度小于该离心减速阈值,且该离心加速度与该离心减速阈值之间的差异大于一第二预设差异值时,该至少一个处理器50可不启动交通工具100的刹车辅助装置30。在该实施方式中,该第二预设差异值可等于0.2g。
48.可以理解,通过上述方式,能够使得交通工具100依据该行驶数据、该行为数据以及路面参数,提前评估是否启动刹车辅助装置30,从而能够达到事先提醒以及事先防护,以避免刹车失效。
49.进一步地,请合并参阅图1与图3,图3是交通工具100中至少一个处理器50执行过程的流程图。多个指令在由至少一个处理器50执行时,使得至少一个处理器50执行以下处理:
50.步骤s201,取得一外力的一行为数据;以及
51.步骤s202,依据该行为数据,计算交通工具100于一行进方向的一刹车减速度。
52.在一实施方式中,当交通工具100进行刹车时,至少一个处理器50可依据该行为数据计算出该刹车减速度,来作为交通工具100的第一减速度,以通过该刹车减速度以及该路面参数,计算出该离心减速阈值。在另一实施方式中,当交通工具100在转弯期间进行刹车时,至少一个处理器50可依据该行为数据计算出该刹车减速度,来作为交通工具100的第二
减速度,以通过该刹车减速度以及该刹车减速阈值,判断是否启动交通工具100的刹车辅助装置30。
53.在一实施方式中,该行为数据可包括一外力力量值、一外力速度值以及一外力频率值中的至少一个。在该实施方式中,该外力力量值为一踏力,该外力速度值为一踏板速度,以及一外力频率值为一踩踏频率。在一实施方式中,至少一个处理器50可通过与刹车接收装置10耦接的感测装置(未示出于图示)来获得该踏力及/或踩踏频率。在该实施方式中,该感测装置可为一液压传感器或一踏力计。在一实施方式中,至少一个处理器50可通过与刹车接收装置10耦接的感测装置(未示出于图示)来获得该踏板速度及/或踩踏频率。在该实施方式中,该感测装置可为一电位计或一光学尺。
54.在一实施方式中,至少一个处理器50可通过该外力力量值、该外力速度值以及该外力频率值中的至少一个,计算交通工具100于一行进方向的一刹车减速度。在一实施方式中,至少一个处理器50可通过该外力力量值以及该外力速度值,计算交通工具100在刹车期间的该刹车减速度。在该实施方式中,至少一个处理器50可通过作为该外力力量值的该踏力fs以及作为该外力速度值的该踏板速度vf,并依据如下式子来计算该刹车减速度ab:
55.ab=[(0.8/fth)
×
fs]
×
(vf/vs)
[0056]
其中,fth可为依据交通工具100的种类而调整的门坎值,vs可为依据交通工具100的种类而调整的标准速度。举例来说:一般汽车的fth可设为20kg且vs可设为4cm/s。在另一实施方式中,该刹车减速度ab的计算过程可依据该踩踏频率来额外乘上小于或等于1的一调整参数。若刹车接收装置10所接收到的该踩踏为一次性的踩踏,则该调整参数可为1。换言之,该刹车减速度ab不须额外调整。若刹车接收装置10所接收到的该踩踏为多次间歇性的踩踏,则该调整参数可依据该踩踏频率来选择小于1的调整参数。
[0057]
由于刹车接收装置10接收到该踩踏的时间以及多个转动装置20产生足够刹车力的时间仍有些微的差距,因此根据上述方式,至少一个处理器50能够通过该外力的该行为数据直接判断该刹车减速度,不须等到实际减速行为发生时才进行该刹车减速度的计算。如此,能够更早根据交通工具10当前状态取得该刹车减速度,以利更早评估是否启动刹车调整装置30。
[0058]
在一实施方式,图3所述的方式,可作为至少一个处理器50在交通工具100进行刹车时,于图2所述之步骤s103通过该行为数据来计算该行进方向的该刹车减速度,以作为该第一方向的该第一减速度。在另一实施方式,图3所述的方式,亦可作为至少一个处理器50在交通工具100于转弯期间进行刹车时,于图2所述之步骤s105通过该行为数据来计算该行进方向的该刹车减速度,以作为该第二方向的该第二减速度。
[0059]
进一步地,在另一实施方式中,请合并参阅图1与图4,图4是交通工具100中至少一个处理器50执行过程的流程图。多个指令在由至少一个处理器50执行时,使得至少一个处理器50执行以下处理:
[0060]
步骤s301,取得交通工具100在该行驶路面上的一行驶数据;
[0061]
步骤s302,依据该行驶数据中一转动数据,计算交通工具100在转弯期间的一曲率半径;以及
[0062]
步骤s303,依据该曲率半径以及该行驶数据中的一速度数据,计算交通工具100的该离心加速度。
[0063]
可以理解,该行驶数据可包括多个转动装置20的该多个转速以及交通工具100的该行进速度。在一实施方式中,至少一个处理器50通过与多个转动装置20耦接的多个感测装置(未示出于图示)来获得该多个转速。在该实施方式中,该多个感测装置为轮速传感器,以获得作为多个转动装置20的各自的转速。在一实施方式中,该行进速度可为通过该多个转速所计算出来的速度,抑或可由其他感测装置直接或间接的取得。
[0064]
在一实施方式中,至少一处理器50可通过所取得的该多个转速,判断交通工具100是直行、左转弯或右转弯。在该实施方式中,当该多个转速相等时,判断交通工具100正在进行直线前进。在该实施方式中,当左方的多个转动装置20的该多个转速大于右方的多个转动装置20的该多个转速时,判断交通工具100正在进行右转弯。在该实施方式中,当左方的多个转动装置20的该多个转速小于右方的多个转动装置20的该多个转速时,判断交通工具100正在进行左转弯。
[0065]
请合并参阅图1、图4与图5,图5为交通工具100于该行驶路面上右转弯的示意图。交通工具100具有一右后轮211以及一左后轮212,其中右后轮211与左后轮212之间具有一轮距t。当交通工具100沿着一行进方向d以一角速度ω进行转弯,右后轮211以一第一曲率半径r1的方式以一第一转速v1进行转动,而左后轮212以一第二曲率半径r2的方式以一第二转速v2进行转动。在本实施方式中,该第二曲率半径r2可等于r1+t。由于至少一个处理器50可通过该行驶数据取得该第一转速v1以及该第二转速v2,且交通工具100的该轮距t可预先储存于储存装置40供至少一个处理器50随时读取,因此至少一个处理器50可依据如下式子来计算该第一曲率半径r1以及该第二曲率半径r2:
[0066][0067]
在该实施方式中,无论该行进方向d为向前或向后之方向以及交通工具100的一转弯方向为一顺时钟方向或一逆时钟方向,交通工具100于转弯时的该第一曲率半径r1的计算结果皆为v1/ω。
[0068]
在一实施方式中,至少一个处理器50可通过该第一曲率半径r1及交通工具100的该行进速度vm,以如下式子计算该离心加速度ay:
[0069]
ay=vm2/r1
[0070]
在一实施方式,图4所述的方式,可作为至少一个处理器50在交通工具100进行转弯时,于图2所述之步骤s103通过该行驶数据来计算该离心方向的该离心加速度,以作为该第一方向的该第一减速度。在另一实施方式,图4所述的方式,亦可作为至少一个处理器50在交通工具100于刹车期间进行转弯时,于图2所述之步骤s105通过该行驶数据来计算该离心方向的该离心加速度,以作为该第二方向的该第二减速度。
[0071]
进一步地,在另一实施方式中,请合并参阅图1与图6,图6是交通工具100中至少一个处理器50执行过程的流程图。多个指令在由至少一个处理器50执行时,使得至少一个处理器50执行以下处理:
[0072]
步骤s401,依据交通工具100在该第一方向的第一减速度,评估多个转动装置在行驶路面上的各自的正向力;
[0073]
步骤s402,依据该多个正向力以及该路面参数,评估该多个转动装置各自的一摩擦力;以及
[0074]
步骤s403,依据该多个摩擦力以及该第一减速度,评估交通工具100于该第二方向的该减速度阈值。
[0075]
在一实施方式中,由于交通工具100在行驶期间会因转弯、刹车以及坡度等因素,导致交通工具100因重心转移的关系,各个转动装置20所承受的正向力可能会各自不同,因此各个转动装置20所承受的摩擦力也可能会各自不同。在该实施方式中,至少一个处理器50依据该多个摩擦力以及该第一减速度,来评估交通工具100各个转动装置20在该第二方向的该减速度阈值。
[0076]
请合并参阅图1、图6与图7,图7为交通工具100于行驶路面700上刹车的侧向示意图。交通工具100具有后轮21以及前轮22,其中后轮21与前轮22之间具有一前后轮距lw,且后轮21收到来自行驶路面700的后轮正向力nb,而前轮22收到来自行驶路面700的前轮正向力nf。交通工具100具有一质量中心110,质量中心110与行驶路面700之间具有一中心高度h,且后轮21与质量中心110之间具有后轮间距lb,而前轮22与质量中心110之间具有前轮间距lf。交通工具100的整体重量为w,而交通工具100于该刹车期间会具有该刹车减速度ax,而该前轮正向力nf与该后轮正向力nb会因为惯性作用而产生重心转移,使得该前轮正向力nf与该后轮正向力nb产生大小变化。若分别以后轮22与前轮21作为原点来计算力矩,则至少一个处理器50可依据如下式子,通过作为该路面参数的一摩擦系数μ、该整体重量w、该刹车减速度ax、该中心高度h、该前后轮距lw、该后轮间距lb以及该前轮间距lf,来计算该后轮正向力nb、该前轮正向力nf、后轮摩擦力frb以及前轮摩擦力frf:
[0077][0078]
在一实施方式中,交通工具100可在上坡或下坡期间进行刹车。当交通工具100在一斜坡坡度θi的行驶路面700上进行上坡或下坡时,该整体重量w于力矩计算时于不同原点的垂直距离皆会受到该斜坡坡度θi的影响,因而导致该后轮正向力nb以及该前轮正向力n产生改变。因此,若交通工具100于不同斜坡坡度θi下行驶时,仍须考虑该斜坡坡度θi对于该后轮摩擦力frb以及该前轮摩擦力frf的影响。在该实施方式中,交通工具100在上坡期间刹车相较于在平地上刹车,该后轮正向力nb会提高而该前轮正向力nf会降低。在该实施方式中,当交通工具100在下坡期间刹车相较于在平地上刹车,该后轮正向力nb会降低而该前轮正向力nf会提高。
[0079]
请合并参阅图1、图6与图8,图8为交通工具100于行驶路面700上进行左转弯的侧向示意图。交通工具100具有左轮23及右轮24,其中左轮23与右轮24之间具有一左右轮距lt,且左轮23收到来自行驶路面700的左轮正向力nl,而右轮24收到来自行驶路面700的右轮正向力nr。交通工具100的质量中心110与行驶路面700之间具有该中心高度h,且左轮23与质量中心110之间具有左轮间距l1,而右轮22与质量中心110之间具有右轮间距lr。交通工具100的整体重量为w,而交通工具100于该转弯期间会具有该离心加速度ay,而该左轮正向力nl与该右轮正向力nr会因为惯性作用而产生重心转移,使得该左轮正向力nl与该右轮正向力nr产生大小变化。若分别以左轮23与右轮24作为原点来计算力矩,则至少一个处理器50可依据如下式子,通过该摩擦系数μ、该整体重量w、该离心加速度ay、该中心高度h、该左右轮距lt、该左轮间距l1以及该右轮间距lr,来计算该左轮正向力nl、该右轮正向力nr、左轮摩擦力frl以及右轮摩擦力frr:
[0080][0081]
若交通工具100于行驶路面700上进行右转弯,则可依据如下式子,计算该左轮正向力nl、该右轮正向力nr、左轮摩擦力frl以及右轮摩擦力frr:
[0082][0083]
在一实施方式中,交通工具100可在上坡或下坡期间进行转弯。当交通工具100在一侧坡坡度θs的行驶路面700上行驶时,该整体重量w于力矩计算时的各个原点的垂直距离皆会受到该侧坡坡度θs的影响,因而导致该左轮正向力nl以及该右轮正向力nr产生改变。因此,若交通工具100于不同侧坡坡度θs下行驶时,仍须考虑该侧坡坡度θs以及倾斜方向对于该左轮摩擦力frl以及该右轮摩擦力frr的影响。在该实施方式中,该侧坡坡度θs的行驶路面700是指行驶路面700本身的左右两侧存在有高度差,而产生路面本身的左右倾斜的该侧坡坡度θs。
[0084]
在一实施方式,若交通工具100同时进行转弯与刹车时,交通工具100的各个转动装置20将具有不同的正向力,而有不同的摩擦力。在一实施方式中,至少一个处理器50可先依据该刹车减速度计算出该后轮正向力nb以及该前轮正向力nf,再依据该后轮正向力nb以及该离心加速度计算出该左后轮正向力nlb以及该右后轮正向力nrb,并依据该前轮正向力nf以及该离心加速度计算出该左前轮正向力nlf以及该右前轮正向力nrf。在另一实施方式中,至少一个处理器50可先依据该离心加速度计算出该左轮正向力nl以及该右轮正向力nr,再分别依据该左轮正向力nl与该右轮正向力nr以及该刹车减速度计算出各个转动装置20的正向力。例如,当交通工具进行左弯刹车时,各个转动装置20的正向力可通过如下式子来取得:
[0085][0086][0087]
当交通工具进行右弯刹车时,各个转动装置20的正向力可通过如下式子来取得:
[0088][0089][0090]
在一实施方式中,在至少一处理器50计算该减速度阈值前,至少一处理器50需先确定多个转动装置20的该多个摩擦力。在该实施方式中,若至少一处理器50已知该刹车减速度而无法确知该离心加速度,则至少一处理器50可通过该后轮正向力nb以及该前轮正向力nf,进行该多个摩擦力的计算。在该实施方式中,若至少一处理器50已知该离心加速度而无法确知该刹车减速度,则至少一处理器50可通过该左轮正向力nl以及该右轮正向力nr,进行该多个摩擦力的计算。在该实施方式中,若至少一处理器50已知该刹车减速度,虽无法确知该离心加速度,但可通过其他装置预测该离心加速度,则至少一处理器50可通过该后
轮正向力nb以及该前轮正向力nf,或通过该刹车减速度以及所预测的该离心加速度来分别计算四个方位的正向力,并进行该多个摩擦力的计算。在该实施方式中,若至少一处理器50已知该离心加速度,虽无法确知该刹车减速度,但可通过其他装置预测该刹车减速度,则至少一处理器50可通过该右轮正向力nr以及该左轮正向力nl,或通过该离心加速度以及所预测的该刹车减速度来分别计算四个方位的正向力,并进行该多个摩擦力的计算。在该实施方式中,若至少一处理器50已知该离心加速度以及该刹车减速度,则至少一处理器50可通过该右轮正向力nr与该左轮正向力nl、该后轮正向力nb与该前轮正向力nf或四个方位各自不同的正向力,以进行该多个摩擦力的计算。
[0091]
在一实施方式中,若交通工具100在刹车时,该第一方向的该第一减速度为该行进方向的该刹车减速度,因此至少一个处理器50可通过该整体重量w以及该刹车减速度而计算出一刹车力,并通过该刹车力与该多个摩擦力以及该第一方向与该第二方向互相垂直的特性,来计算出各个转动装置20在该第二方向的离心减速阈值。在另一实施方式中,若交通工具100在转弯时,该第一方向的该第一第一减速度为该离心方向的该离心加速度,因此至少一个处理器50可通过该整体重量w以及该离心加速度而计算出一离心力,并通过该离心力与该多个摩擦力以及该第一方向与该第二方向互相垂直的特性,来计算出各个转动装置20在该第二方向的刹车减速阈值。在一实施方式中,若至少一处理器50已知该离心加速度以及该刹车减速度,则至少一处理器50可将针对即将改变的其中一者设定为第二减速度,而另一者设定为第一减速度,并通过第一减速度来计算该减速度阈值,并将该减速度阈值作为后续与该第二减速度比较的对象。举例来说:当交通工具100在转弯期间刹车时,若转弯的曲率半径持续减小,则该离心加速度持续上升,则可以该刹车减速度作为第一减速度来计算该减速度阈值。如若该刹车减速度持续增加,则可以该离心加速度作为第一减速度来计算该减速度阈值。
[0092]
在一实施方式中,由于不同位置的转动装置20在转弯或刹车期间会具有不同的正向力,而有对应不同的摩擦力,因此不同位置的转动装置20会具有不同的该减速度阈值。在该实施方式中,若该多个正向力越大,则其对应的该多个摩擦力也会越大。因此,至少一处理器50可直接通过多个转动装置20中所具有该多个正向力的最小值,来与该第一减速度进行运算,以评估该减速度阈值,以减少与该第二减速度的比较次数。例如:当交通工具进行刹车时,至少一处理器50可直接通过该后轮正向力nb进行该减速度阈值的运算。当交通工具进行左转弯时,至少一处理器50可直接通过该左轮正向力nl进行该减速度阈值的运算。当交通工具进行左弯刹车时,至少一处理器50可通过该左后轮正向力nlb与该左前轮正向力nlf进行比较,来运算该减速度阈值。当交通工具进行右弯刹车时,至少一处理器50可通过该右后轮正向力nrb与该右前轮正向力nrf进行比较,来运算该减速度阈值。
[0093]
可以了解,通过该减速度阈值的计算,可作为交通工具100进行刹车或转弯的参考数据,并作为刹车辅助装置30是否启动的参考依据。
[0094]
在一实施方式中,图6所述的方式,可作为至少一个处理器50在交通工具100进行转弯或刹车时,于图2所述之步骤s104依据该路面参数与该第一减速度,评估交通工具100于一第二方向的一减速度阈值。
[0095]
进一步地,在另一实施方式中,请合并参阅图1与图9,图9是交通工具100中至少一个处理器50执行过程的流程图。多个指令在由至少一个处理器50执行时,使得至少一个处
理器50执行以下处理:
[0096]
步骤s501,取得该第二方向的该第二减速度;
[0097]
步骤s502,比较该第二减速度与该减速度阈值;以及
[0098]
步骤s503,依据该第二减速度与该减速度阈值的比较结果判断是否启动交通工具100的该刹车辅助装置。
[0099]
在一实施方式中,交通工具100在转弯期间进行刹车时,至少一处理器50可如图3所述的方式,依据该行为数据计算交通工具100于该第二方向的该刹车减速度作为该第二减速度。在一实施方式中,交通工具100在刹车期间进行转弯时,可如图4所述的方式,依据该行驶数据计算交通工具100于该第二方向的该离心加速度作为该第二减速度。在一实施方式中,至少一个处理器50可与一定位装置(未示出于图示)耦接并取得一地图数据,并依据交通工具100在该地图数据上的一定位位置来产生一预估路径。当交通工具100在刹车期间时,如果至少一个处理器50依据该预估路径判断交通工具100将在刹车期间进入一弯道时,则至少一个处理器50可依据该地图数据判断该弯道的该曲率半径,并进一步预测交通工具100进入该弯道时剩下的该行进速度,以预估该离心加速度作为该第二减速度。在该实施方式中,该离心加速度的预估方式亦可于图6的步骤s403使用,以一并作为该减速度阈值的参考依据。在一实施方式中,至少一个处理器50可与该定位装置耦接并取得该地图数据,并依据交通工具100在该地图数据上的该定位位置来产生该预估路径,以及依据该预估路径取得一路况数据。当交通工具100在转弯期间,如果至少一个处理器50依据该路况数据判断交通工具100将在转弯期间进行刹车时,则至少一个处理器50可依据该路况数据预测交通工具100所需的该刹车减速度作为该第二减速度。举例来说:至少一个处理器50可藉由该路况数据得知该预估路径上的一堵塞点,藉由该堵塞点、交通工具100的现有位置、交通工具100现有的该行进速度以及该路况数据所显示该堵塞点中其他交通工具的一推估速度,来预测交通工具100所需的该刹车减速度作为该第二减速度。在该实施方式中,该刹车减速度的预估方式亦可于图6的步骤s403使用,以一并作为该减速度阈值的参考依据。
[0100]
在一实施方式中,刹车补助装置30可包括一刹车警示装置以及一刹车调整装置中至少一个。在该实施方式中,该刹车警示装置用于依据该减速度阈值来发出警示讯号,且该刹车调整装置用于依据该减速度阈值来调整交通工具100的一刹车行为。
[0101]
在一实施方式中,该刹车警示装置可为一警示铃或一警示灯,以提供一警示声响或一警示灯号。在一实施方式中,该刹车警示装置可为一方向盘震动器,提供一警示震动给驾驶员。在一实施方式中,该刹车警示装置可为一显示设备,以提供一警示讯号给驾驶员。
[0102]
在一实施方式中,该刹车调整装置可为一电控刹车系统。在该实施方式中,该电控刹车系统可为刹车防抱死系统(anti-lock braking system,abs)或动态稳定系统(electronic stability control,esc)等通过电子系统控制之刹车辅助系统。
[0103]
在一实施方式中,至少一个处理器50会将该第二减速度与该减速度阈值进行比较。在该实施方式中,若该第二减速度大于或等于该减速度阈值时,该刹车警示装置可发出高级警示讯号,且该刹车调整装置可启动来调整交通工具的该刹车行为。在该实施方式中,若该第二减速度小于该减速度阈值且该第二减速度与该减速度阈值之间的差异小于或等于该第一预设差异值或该第二预设差异值时,该刹车警示装置可发出普通警示讯号,但该刹车调整装置可不启动。在该实施方式中,若该第二减速度小于该减速度阈值且该第二减
速度与该减速度阈值之间的差异大于该第一预设差异值或该第二预设差异值时,该刹车警示装置以及该刹车调整装置可皆不启动。
[0104]
在一实施方式中,至少一处理器50可耦接一显示设备(未示出于图示)。在该实施方式中,无论该第二减速度与该减速度阈值得比较结果为何,至少一处理器50皆可通过该显示设备,显示现有刹车或转弯的风险程度。
[0105]
在一实施方式中,图9所述的方式,可作为至少一个处理器50在交通工具100进行转弯或刹车时,于图2所述之步骤s105依据该减速度阈值,判断是否启动交通工具100的该刹车辅助装置。
[0106]
可以理解,通过上述方式,能够使得该交通工具可提前推估刹车减速度与离心加速度中的至少一个,来推算减速度阈值,并通过该刹车减速度以及该离心加速度中的一个与该减速度阈值的比较,来进行提前预警,甚至提前启动刹车辅助装置,从而能够有效控制刹车以避免刹车失效。
[0107]
综上所述,本发明符合发明专利要件,爰依法提出专利申请。惟,以上所述者仅为本发明之较佳实施方式,举凡熟悉本案技艺之人士,在爰依本案创作精神所作之等效修饰或变化,皆应包含于以下之申请专利范围内。
[0108]
附图标记说明
[0109]
100:交通工具
[0110]
10:刹车接收装置
[0111]
20:转动装置
[0112]
30:刹车辅助装置
[0113]
40:储存装置
[0114]
50:处理器
[0115]
s101-s105:步骤
[0116]
s201-s202:步骤
[0117]
s301-s303:步骤
[0118]
211:右后轮
[0119]
212:左后轮
[0120]
s401-s403:步骤
[0121]
110:质量中心
[0122]
21:前轮
[0123]
22:后轮
[0124]
700:行驶路面
[0125]
23:左轮
[0126]
24:右轮
[0127]
s501-s503:步骤
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1