驾驶辅助装置及驾驶辅助方法与流程
1.本公开涉及辅助车辆驾驶的驾驶辅助装置及驾驶辅助方法。
背景技术:
2.近年来,作为辅助车辆的驾驶的一种技术,自适应巡航控制(adaptive cruise control,以下记为“acc”)备受瞩目(例如,参照专利文献1)。acc是一种用于通过获取车辆的车速、前车相对于该车辆的相对速度及与前车之间的车间距离等,控制车辆的驱动系统及制动系统,使得其车速、与前车之间的车间距离保持恒定的技术。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开平7-17295号公报
技术实现要素:
6.发明要解决的问题
7.然而,在搭载有acc功能的车辆上,除了用于操作acc开启关闭的acc开启关闭操作单元,还设有用于执行acc工作中的起步操作的acc起步操作单元。acc开启关闭操作单元例如是设置在方向盘附近的开关或操纵杆。acc起步操作单元例如是设置在方向盘附近的操纵杆、或加速踏板。
8.其中,acc起步操作单元是为了通过规则禁止由acc引起的自动起步而设置的。也就是说,仅当驾驶员操作acc起步操作单元时,才能从acc开启的停车状态起步。
9.但是,即使在停车时由驾驶员执行acc起步操作,在与前车的距离小于某个预设的允许起步车间距离d1的情况下,也会有不接收acc起步操作的车辆。这是为了防止在车间距离比允许起步车间距离d1小且前车突然停车的情况下,本车有可能无法停车。
10.然而,通常,使用acc停车时的车间距离d2通常比允许起步车间距离d1小。因此,在车辆停止时,驾驶员必须等待与前车之间的车间距离达到允许起步车间距离d1,才能执行acc起步操作,精神上会感到疲劳。另外,由于如果在与前车之间的车间距离小于允许起步车间距离d1时执行了acc起步操作,则该操作将不被接收,因此,必须在车间距离变为允许起步车间距离d1以上时再次执行acc起步操作,浪费精力和时间。
11.本公开是考虑上述问题而完成的,提供一种能够避免在驾驶员不希望的时刻执行acc起步,能够简化起步时的驾驶员的acc起步操作的驾驶辅助装置及驾驶辅助方法。
12.解决问题的方案
13.本公开的驾驶辅助装置的一个方面为,
14.一种辅助车辆的驾驶的驾驶辅助装置,包括:
15.自适应巡航控制acc起步操作接收单元,在acc开启且本车在停止中时,接收驾驶员的起步操作;以及
16.acc起步操作保持单元,将通过所述acc起步操作接收单元接收到的所述acc起步
操作在所述acc起步操作后的预设时间段内作为有效指示保持,并在经过所述预设时间段后取消。
17.本公开的驾驶辅助方法的一个方面为,
18.一种辅助车辆的驾驶的驾驶辅助方法,包括:
19.acc起步操作接收步骤,接收本车在停止中时的驾驶员的acc起步操作;以及
20.acc启动指示保持步骤,将接收到的所述acc起步操作在所述acc起步操作后的预设时间段内作为有效指示保持,并在经过所述预设时间段后取消。
21.发明效果
22.根据本公开,将通过acc起步操作接收单元接收到的所述acc起步操作在acc起步操作后的预设时间段内作为有效指示保持,并在经过所述预设时间段后取消,由此,能够避免在驾驶员不希望的时刻执行acc起步,简化起步时的驾驶员的acc起步操作。
附图说明
23.图1为示出了应用了实施方式的驾驶辅助装置的车辆的示例的外观图。
24.图2为示出了实施方式的车辆的结构的框图。
25.图3为示出了实施方式的驾驶辅助装置的结构的框图。
26.图4为示出了用于说明实施方式的驾驶辅助装置的动作的流程图。
具体实施方式
27.下面,参照附图对本公开的一个实施方式进行详细说明。
28.《1》车辆的结构
29.首先,对包括本公开的一个实施方式的驾驶辅助装置的车辆的结构进行说明。
30.图1为示出了应用了本实施方式的驾驶辅助装置的车辆1的示例的外观图。此外,图2为示出了车辆1的结构的框图。需要说明的是,这里着眼于与驾驶辅助装置相关的部分进行图示及说明。
31.如图1所示,车辆1是可连结拖车2并进行牵引的牵引车头(牵引车)。车辆1包括:车辆主体部3,具有发动机、驱动轮等动力系统和驾驶席;以及连结到车辆本体部3的拖车2。
32.如图2所示,车辆1包括:用于使车辆1行驶的驱动系统10、用于使车辆1减速的制动系统20、以及用于辅助驾驶员驾驶车辆1的驾驶辅助装置30等。
33.驱动系统10包括发动机11、离合器12、变速器(变速箱)13、传动轴(propeller shaft)14、差动装置(差动齿轮)15、驱动轴(drive shaft)16、车轮17、发动机用ecu18及动力传递用ecu19。
34.发动机用ecu18及动力传递用ecu19通过控制器局域网络(controller area network,can)等车载网络与驾驶辅助装置30连接,从而可以相互收发必要的数据或控制信号。发动机用ecu18根据来自驾驶辅助装置30的驱动指令,控制发动机11的输出。动力传递用ecu19根据来自驾驶辅助装置30的驱动指令,控制离合器12的接合/分离及变速器13的变速。
35.发动机11的动力经由离合器12传递到变速器13。传递到变速器13的动力进而经由传动轴14、差动装置15以及驱动轴16传递到车轮17。由此,发动机11的动力传递到车轮17,
车辆1行驶。
36.制动系统20包括:常用制动器21、辅助制动器22、23、驻车制动器(省略图示)以及制动器用ecu24。
37.常用制动器21通常是被称为主制动器、摩擦制动器、脚踏制动器或基础制动器等的制动器。常用制动器21例如是通过将制动衬片按压在与车轮17一起旋转的制动鼓的内侧而获得制动力的鼓式制动器。
38.辅助制动器22是通过直接向传动轴14的旋转施加负荷来获得制动力的减速器(以下称为“减速器22”),例如,电磁减速器。辅助制动器23是利用发动机的旋转阻力来提高发动机的制动效果的排气制动器(以下称为“排气制动器23”)。通过设置减速器22和排气制动器23,能够增大制动力,并且由于常用制动器21的使用频率降低,因此能够抑制制动衬片等的磨损。
39.制动器用ecu24通过can等车载网络与驾驶辅助装置30连接,可以相互收发必要的数据或控制信号。制动器用ecu24根据来自驾驶辅助装置30的制动指令,控制常用制动器21的制动力(车轮17的轮缸的制动液压)。
40.常用制动器21的制动动作由驾驶辅助装置30及制动器用ecu24控制。减速器22和排气制动器23的制动动作由驾驶辅助装置30打开/关闭的方式控制。由于减速器22和排气制动器23的制动力基本固定,因此,在正确地产生期望的制动力的情况下,适合使用可以细致地调整制动力的常用制动器21。
41.驾驶辅助装置30输入来自毫米波雷达或摄像头的信息。来自毫米波雷达或摄像头的信息是表示车辆前方的交通状况或道路状况的信息。此外,驾驶辅助装置30包括:acc用操作单元41、加速器操作检测单元43、制动器操作检测单元44等。
42.驾驶辅助装置30形成用于控制驱动系统10及制动系统20的动作的控制信号。具体地,驾驶辅助装置30求出用于实现acc的目标加减速度,并将它们适当地输出到发动机用ecu18、动力传递用ecu19及制动器用ecu24。
43.需要说明的是,虽然未图示,发动机用ecu18、动力传递用ecu19、制动器用ecu24及驾驶辅助装置30例如分别具有中央处理器(central processing unit,cpu)、存储有控制程序的只读存储器(read only memory,rom)等存储介质、随机存取存储器(random access memory,ram)等作业用存储器、以及通信电路。在这种情况下,例如通过cpu执行控制程序来实现构成驾驶辅助装置30的后述各单元的功能。另外,发动机用ecu18、动力传递用ecu19、制动器用ecu24以及驾驶辅助装置30的全部或部分可以一体地构成。
44.acc用操作单元41包括用于控制acc的启动和解除的acc打开关闭开关。此外,acc用操作单元41包括用于执行acc的各种设定的设定开关。驾驶员通过操作设定开关,例如能够设定目标车间距离及目标本车速度。此外,acc用操作单元41包括:用于执行acc中的起步操作的acc起步操作单元。该acc起步操作单元例如是设置在方向盘附近的操纵杆、或加速踏板。
45.加速器操作检测单元43检测加速器踏板的踩踏量,并将检测结果输出到驾驶辅助装置30。驾驶辅助装置30基于加速器踏板的踩踏量,向发动机用ecu18及动力传递用ecu19发送驱动指令。
46.制动器操作检测单元44检测用于使常用制动器21动作的制动器踏板的踩踏量。另
外,制动器操作检测单元44检测使减速器22或者排气制动器23动作的辅助制动杆是否被操作。然后,制动器操作检测单元44将制动器踏板和辅助制动杆相关的检测结果输出到驾驶辅助装置30。驾驶辅助装置30基于制动器踏板的踩踏量向制动器用ecu24发送制动指令。此外,驾驶辅助装置30基于辅助制动杆的操作来控制减速器22或排气制动器23的打开/关闭动作。
47.此外,驾驶辅助装置30从信息输出单元50输出与行驶或acc相关的各种信息。例如,从信息输出单元50输出表示acc正在运行或acc被解除的显示或声音。
48.《2》驾驶辅助装置的结构
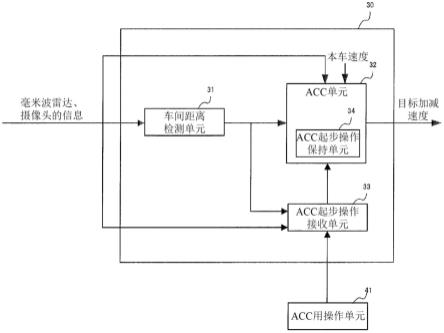
49.图3为示出了本实施方式的驾驶辅助装置30的结构的框图。
50.驾驶辅助装置30包括:车间距离检测单元31、acc单元32、acc起步操作接收单元33以及acc起步操作保持单元34。
51.车间距离检测单元31基于由毫米波雷达、摄像头等获得的本车1前方的信息,测量(检测)本车1与前车之间的车间距离,并将测量结果输出到acc单元32。需要说明的是,车间距离检测单元31也可以基于来自激光雷达等其他传感器的信息来测量车间距离。
52.acc单元32根据本车与前车的相对速度及车间距离,输出用于使本车跟随前车的目标加减速度。由此,实现自动跟随控制。此外,在没有前车的情况下,acc单元32输出用于使本车的速度达到所设定的恒定速度的目标加速度,从而实现定速行驶控制。
53.自动跟随行驶控制是指,当在预设范围内存在前车时,使驱动系统10以及制动系统20动作,以使车间距离收敛在预设的目标范围内且相对速度接近于零的控制。定速行驶控制是指,在预设范围内不存在前车时,使驱动系统10和制动系统20动作,以使车辆1的行驶速度接近预设的目标值的控制。
54.acc起步操作接收单元33接收本车1在停止中时的驾驶员的acc起步操作。也就是说,acc起步操作接收单元33探测到本车1在停止中时acc用操作单元41中包括的acc起步操作单元被驾驶员操作(以下称为“acc起步操作”),则将其输出到acc单元32。
55.当输入acc起步操作时,acc单元32在满足预设条件时执行acc中的起步。此外,acc单元32在预设时间段内将acc起步操作保持在acc起步操作保持单元34中。
56.acc起步操作保持单元34将acc起步操作在acc起步操作后的预设时间段内作为有效指示保持,在经过预设时间段后取消acc起步操作。
57.《3》驾驶辅助装置的动作
58.下面,对驾驶辅助装置30的动作进行说明。本实施方式的驾驶辅助装置30特别在从停车到起步的动作中具有特征。因此,这里将参照图4以从停车到起步的动作为中心进行说明。
59.当车辆1从acc运行状态(步骤s11)停车时(步骤s12;“是”),进入步骤s13,等待接收acc起步操作。当存在起步操作时,驾驶辅助装置30从步骤s13进入步骤s14。
60.在步骤s14中,acc单元32判断与前车之间的车间距离是否在允许起步车间距离d1以上,如果在允许起步车间距离d1以上(步骤s14;“是”),则进入步骤s15,使车辆1起步。需要说明的是,在通常情况下,在acc运行中时,允许起步车间距离d1一般比停车时的车间距离d2大。因此,如果驾驶员在acc运行下的停车位置进行acc起步操作,则会在步骤s14中得到否定结果。与此相对,如果驾驶员在与前车的距离在允许起步车间距离d1以上时进行acc
起步操作,则会在步骤s14中得到肯定结果。
61.当在步骤s14中得到否定结果时,驾驶辅助装置30进入步骤s20,acc起步操作被保持在acc起步操作保持单元34中。
62.然后,在步骤s21中,驾驶辅助装置30向动力传递用ecu19输出指示接合变速器13的档位(挂档)的控制信号。另外,此时,驾驶辅助装置30向动力传递用ecu19输出指示离合器为断开状态的控制信号。
63.由此,当与前车的距离满足步骤s14的条件,且车辆1开始起步时,能够响应性良好地起步。即,保持acc起步操作信号意味着处于将要起步的状态,所以在本实施方式中,有效利用保持acc起步操作的时间段来进行起步准备。
64.此外,在步骤s22中,驾驶辅助装置30向信息输出单元50输出用于进行表示acc起步操作被保持的显示的控制信号。需要说明的是,也可以通过声音通知驾驶员acc起步操作被保持。总之,在acc起步操作保持单元34保持acc起步操作的时间段,只要向驾驶员可识别地输出acc起步操作正在被保持即可。
65.通过这样做,驾驶员能够识别出acc起步操作正在被保持,因此无需进行不必要的acc起步操作。
66.接着,在步骤s23中,判断从acc起步操作起是否经过了预设时间段。如果未经过预设时间段(步骤s23;“否”),则返回步骤s14,acc单元32再次判断与前车之间的车间距离是否达到了允许起步车间距离d1以上。
67.与此相对,如果经过了预设时间段(步骤s23;“是”),则进入步骤s23,取消(删除)acc起步操作保持单元34中保持的acc起步操作。其中,上述预设时间段优选为10秒以下。上述预设时间段应设为驾驶员不会忘记进行了acc起步操作的时间段。
68.在本实施方式中,在经过上述预设时间段后,取消acc起步操作保持单元34中保持的acc起步操作,原因如下。即,为了避免驾驶员忘记正在保持acc起步操作,而致使车辆在驾驶员不希望的时刻起步这样非常危险的情况。
69.在步骤s25中,驾驶辅助装置30向信息输出单元50输出用于进行表示acc起步操作被取消的显示的控制信号。需要说明的是,也可以通过声音通知驾驶员acc起步操作被取消。总之,只要向驾驶员可识别地输出acc起步操作被取消即可。
70.驾驶辅助装置30在步骤s25之后返回到步骤s13。
71.本实施方式的驾驶辅助装置30的动作要点如下。
72.例如,在因红灯等而停车的状态下,前车开始移动时,驾驶员执行acc起步操作。此时,如果与前车的距离没有在允许起步车间距离d1以上,则不接收acc起步操作的话,驾驶员就会被迫执行麻烦的acc起步操作。
73.考虑到这一点,在本实施方式中,即使与前车之间的车间距离小于允许起步车间距离d1,也接收驾驶员的acc起步操作。然后,在预设时间段(例如2秒)内保持acc起步操作,如果经过了预设时间段,则取消acc起步操作。
74.即,如果与前车之间的车间距离在执行acc起步操作后的预设时间段内在允许起步车间距离d1以上,则进行acc的起步。与此相对,如果在预设时间段内未达到允许起步车间距离d1以上,则取消acc起步操作,驾驶员将再次执行acc起步操作。
75.这样,如果在预设时间段内未达到允许起步车间距离d以上,则取消acc起步操作,
由此,能够防止在驾驶员忘记执行了acc起步操作时进行起步。
76.《4》实施方式的效果
77.如上所述,根据本实施方式,驾驶辅助装置30包括:acc起步操作接收单元33,接收本车在停止中时的驾驶员的acc起步操作;以及acc起步操作保持单元34,将通过acc起步操作接收单元33接收到的acc起步操作在acc起步操作后的预设时间段内作为有效指示保持,并在经过预设时间段后取消。由此,能够避免在驾驶员不希望的时刻执行acc起步,能够简化起步时驾驶员的acc起步操作。
78.《5》其他实施方式
79.上述实施方式仅是表示实施本公开时的具体的一例,不应由此限定地解释本公开的技术范围。即,本公开在不脱离其主旨或其主要特征的范围内,能够以各种形式实施。
80.尽管在上述的实施方式中,acc起步操作保持单元34设置在acc单元32中,但acc起步操作保持单元34也可以设置在acc单元32的外部。此外,acc起步操作接收单元33也可位于acc单元32的内部。
81.在上述实施方式中,对应用了本公开的驾驶辅助装置及方法的车辆1为能够连结拖车2并进行牵引的牵引车头的情况进行了说明,但能够应用本公开的车辆不限于此,例如也可以是轿车等车辆。
82.本技术是基于在2020年2月28日提出的日本专利申请(日本特愿2020-34393号)的申请,其全部内容通过引用并入本文。
83.工业实用性
84.本公开的驾驶辅助装置和驾驶辅助方法作为能够避免在驾驶员不希望的时刻执行acc起步,其能够简化起步时驾驶员的acc起步操作的驾驶辅助装置和驾驶辅助方法是有用的。
85.附图标记说明
86.1车辆
87.2拖车
88.3车辆主体部
89.10驱动系统
90.11发动机
91.12离合器
92.13变速器
93.14传动轴
94.15差动装置
95.16驱动轴
96.17车轮
97.18发动机用ecu
98.19动力传递用ecu
99.20制动系统
100.21常用制动器
101.22减速器
102.23排气制动器
103.24制动器用ecu
104.30驾驶辅助装置
105.31车间距离检测单元
106.32acc单元
107.33acc起步操作接收单元
108.34acc起步操作保持单元
109.41acc用操作单元
110.43加速器操作检测单元
111.44制动器操作检测单元
112.50信息输出单元
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1