在轨道车辆中的用于控制一个或多个防滑系统和一个或多个用于排出附着优化剂的系统的调节装置和调节方法与流程
1.本技术涉及一种调节装置和一种调节方法,利用该调节装置和调节方法可以调节一个或多个用于排出附着优化剂例如砂子的装置和一个或多个轨道车辆上的防滑系统。
背景技术:
2.在现有技术中,在防滑系统中使用了各种不同的防滑算法,这些防滑算法为不同的轮轨附着状态设定了与其对应匹配的滑动范围。这种防滑系统主要用于最佳地利用车轮(或车轮组)与轨道之间的可用附着力并且在这种情况下特别是用于预防车轮和轨道的磨损。
3.防滑系统能够控制车轮速度和/或制动压力,使得可用附着力尽可能最佳地用于车辆驱动和制动。
4.此外,在现有技术中已知用于附着优化剂(例如砂子)的各种应用系统。附着优化剂(例如砂子)在轨道车辆的特定车轮或车轮组之前或紧邻其附近被涂敷在轨道上。然后,附着优化剂被车轮或车轮组驶过。因此改善了车轮(或车轮组)对轨道的附着力。
5.在这种情况下,附着优化剂可以是固体(例如砂子),但是也存在液体、凝胶、具有固体(烟)的气态物质、具有液滴(雾)的气态物质和气溶胶。
6.在车轮和轨道之间的附着力不够时,这样的系统可以将附着优化剂(例如砂子)引入到车轮-轨道的接触中。
7.附着优化剂的施加可以恒定,但也可以取决于速度。
8.在现有技术中,特别是在快速或紧急制动的情况下,铺砂设备是自动激活的。因此,车轮与轨道之间的附着力因此通常可以增加。
9.在现有技术中例如已知文献de 600 26 290t2。这里公开了一种用于增加用于铁路车辆或轨道车辆的车轮/轨道粘附或附着能力的方法。当操纵制动器时,该方法监视制动系统。此外,增加粘附或附着能力的颗粒可以可调节或可设定的量施加在车轮/轨道界面处。车辆还包括车轮滑动保护系统,其响应于车轮滑动的检测来调制制动缸中的压力。该方法被设计成确定制动缸中的压力,该压力指示粘附或附着能力的值。然后,可以与该压力值相符地控制增加粘附或附着能力的颗粒的量或通过量。
10.该粘附或附着能力的值可以向车辆的车辆驾驶员显示。
11.在现有技术中还已知文献us5,428,538。这里公开了一种用于将砂子施加到轨道和轨道车辆的车轮之间的接触面上的电子控制系统,以及用于自动控制轨道铺砂以改善轮轨附着的铺砂装置。在快速制动时可以激活铺砂,以及可以根据不同的系统状态和手动铺砂进行激活。
12.然而,在特定操作条件下还可能的是,防滑系统和铺砂设备或用于输出附着优化剂的设备同时被激活,因为这些设备配备有单独的传感器并且用于这些设备的调节系统也具有其自身的何时激活这样的设备的标准。
13.然而,在通常由防滑系统设定的车轮滑动降低铺砂效果的情况下可能的是,这在该情况下导致比实际可能的制动路程更长的制动路程,并且还不必要地增加附着优化剂例如砂子的使用。
技术实现要素:
14.因此,本发明的一个目的是调整或优化防滑系统的和用于输出附着优化剂的设备的功能。因此,一个目的是这两个系统相互协作。
15.该目的通过根据权利要求1所述的调节系统和根据本发明的权利要求9所述的调节方法来实现。另外的有利方案是从属权利要求的主题。
16.本技术涉及一种用于至少一个防滑系统的和用于排出轨道车辆的附着优化剂的至少一个单元的调节装置,其中,该调节装置具有:
17.第一输入装置,用于接收至少一个状态信号(即例如制动请求、制动目标值或关于车辆结构的信息);
18.第二输入装置,用于接收所述至少一个防滑系统的当前检测到的状态变量(即例如达到的滑动或滑动范围、即实际滑动或实际滑动范围);
19.第三输入装置,用于接收用于排出附着优化剂的单元的当前检测到的状态变量(关于用于排出附着优化剂的单元的运行的信息),
20.其中,所述调节装置设置用于根据所述至少一个状态信号和用于排出附着优化剂的单元的当前检测到的状态变量来确定目标滑动或目标滑动范围并将其经由第一输出装置输出给所述至少一个防滑系统。
21.优选地,所述调节装置还设置用于确定用于排出附着优化剂的单元要排出的附着优化剂的量并将其经由第二输出装置输出给用于排出附着优化剂的单元。
22.因此,所述调节装置利用来自所述至少一个防滑系统的参数/值(例如实际滑动)和/或来自用于排出附着优化剂的所述至少一个单元的参数/值(例如当前的砂子排出量),将这些参数/值彼此比较并确认这些参数/值是否彼此兼容。所述调节装置考虑两个输入值并由其计算用于所述至少一个防滑系统和所述至少一个用于排出附着优化剂的单元的输出值。
23.因此例如可以避免附着优化剂的效果随着通常由防滑装置设定的车轮滑动而降低,这将导致比实际可能的制动路程更长的制动路程并且还导致不必要高地使用附着优化剂。
24.也可能的是,防滑系统和用于排出附着优化剂的单元也从调节装置获得关于相应另一者的运行状态的信息。
25.优选地,在调节装置中可相应规定可经由第一输出装置输出的目标滑动或目标滑动范围的值范围和/或可经由第二输出装置输出的附着优化剂的量。这些值范围也可以从防滑系统或用于排出附着优化剂的单元中读取。因此,目标滑动(范围)或附着优化剂的排出量的值或值范围受到限制,例如受到由标准规定的值或范围的限制。因此,目标滑动或目标滑动范围以及附着优化剂的排出量永远不会超过这些规定值,并且根据制动要求,如果相应另一个值落在这些极限之一上,则相应的装置或系统必须进行补偿。
26.更优选地,可由第三输入装置检测的状态变量指示附着优化剂是否被排出,优选
指示附着优化剂的排出量。这例如可以是附着优化剂的排出量(每单位时间或每经过的距离段)。
27.更优选地,可由第二和第三输入装置检测至少一个另外的状态变量,例如对应防滑系统在车辆中的位置、和/或对应防滑系统关于第二输入装置的效率、和/或包括在用于排出附着优化剂的单元中的附着优化剂的填充水平和/或性质、和/或用于排出附着优化剂的单元在轨道车辆上关于第三输入装置的位置。
28.因此例如可以规定并考虑由防滑系统检测的车轮/车轮组距与用于排出附着优化剂的单元有多远和/或是否还有足够的附着优化剂储备存在并准备输出到轨道上。如果不是这种情况,防滑系统可以可能对应地对其进行补偿,如果可能的话。
29.详细而言,输出值的确定可以包括相对位置,用于排出附着优化剂的单元位于相对于分配给防滑系统的车轮/车轮组的所述相对位置中。当多个车轮组已经碾压了所述输出的附着优化剂(于是必须相应地考虑这一点)时,附着优化剂(如砂子)的作用会打折扣。也可以考虑特定车轮组何时将到达附着优化剂所输出到的轨道上(通过将对应车轮组与用于排出附着优化剂的单元的距离以及轨道车辆的行驶速度考虑在内)。
30.优选地,在调节装置、防滑系统和用于排出附着优化剂的单元之间交换的信号是简单二进制电信号和/或总线信号。
31.优选地,借助至少一个存储的函数关系(例如,待设定的目标滑动根据砂量和车辆速度以及在车辆中的位置的函数关系)和/或存储的数学公式来确定目标滑动或目标滑动范围的输出信号和附着优化剂的量,所述函数关系可通过实验或模拟确定,以及可选地考虑至少一个另外的变量,所述另外的变量更优选地取决于车辆、取决于速度和/或是取决于摩擦力,并且更优选地被存储为特性曲线。
32.由此,存储目标滑动或目标滑动范围以及附着优化剂的量的各种不同的值对或数学关系。
33.在考虑另外的变量、例如车辆速度或车轮速度的情况下,则可以更精确和更优化地设定目标滑动或目标滑动范围和附着优化剂的量。
34.在另一个实施方式中,利用根据本发明的调节装置可调节多个防滑系统和多个用于排出轨道车辆的附着优化剂的装置,其中,设有对应多个第二输入装置以用于接收相应防滑系统的检测到的状态变量以及相应多个第三输入装置以用于接收用于排出附着优化剂的装置的检测到的状态变量,并且其中,该调节装置设置用于根据所述至少一个状态信号相应确定目标滑动或目标滑动范围并将其通过相应第一输出装置输出给多个防滑系统,并且优选相应确定用于排出附着优化剂的相应单元要排出的附着优化剂的量并将其通过相应第二输出装置输出给用于排出附着优化剂的相应单元。
35.因此,车轮滑动可鉴于砂量设定和/或砂量可鉴于多个车厢的后面的车轮组的滑动曲线设定。在此,可以考虑例如预期的所谓的“交叉提高”的效果,即,由于多次碾压而引起的车轮/轨道附着力的增加(对于后续的车轮组是容易看到的)。由此,例如,即使在砂量减少的情况下也可以实现期望的制动力(消耗最小化)。
36.在这种情况下,调节装置也可以被分为多个调节装置。
37.根据本发明的用于调节至少一个防滑系统和至少一个用于排出附着优化剂的系统的函数的控制方法包括以下步骤:
38.a)检测至少一个状态信号;
39.b)检测所述至少一个防滑系统的运行状态;
40.c)检测所述至少一个用于排出附着优化剂的系统的运行状态;
41.d)根据所述至少一个状态信号和所述至少一个用于排出附着优化剂的系统的运行状态,设定所述至少一个防滑系统的目标滑动或目标滑动范围;并且优选地:
42.e)基于所述状态信号和所述至少一个防滑系统的运行状态,设定所述至少一个用于排出附着优化剂的系统的附着优化剂的量。
43.由此评估来自所述至少一个防滑系统和所述至少一个用于排出附着优化剂的单元的参数/值,将这些参数/值彼此比较并确认这些参数/值是否彼此兼容。所述调节方法考虑两个输入值并由其来计算用于所述至少一个防滑系统和所述至少一个用于排出附着优化剂的单元的输出值。
44.因此例如可以避免附着优化剂的效果随着通常由防滑装置设定的车轮滑动而降低,这将导致比实际可能的制动路程更长的制动路程并且还导致不必要高程度地使用附着优化剂。
45.优选地,在该调节方法中,用于排出附着优化剂的系统的运行状态指示是否排出附着优化剂,并且优选指示附着优化剂的排出量。
46.更优选地,利用根据本发明的调节方法可调节多个防滑系统和多个用于排出轨道车辆的附着优化剂的单元,并且该方法包括以下步骤:
47.a)检测至少一个状态信号;
48.b)检测多个防滑系统的运行状态;
49.c)检测多个用于排出附着优化剂的系统的运行状态;
50.d)基于所述至少一个状态信号和用于排出附着优化剂的单元的运行状态,相应设定防滑系统的目标滑动或目标滑动范围;可选地:
51.e)基于状态信号和防滑系统的运行状态,设定用于排出附着优化剂的单元的附着优化剂的排出量。
附图说明
52.下面参考附图更详细地解释优选实施例:
53.图1示出了根据本发明实施方式的具有防滑系统和用于排出附着优化剂的单元(在这种情况下是铺砂装置)的制动装置以及调节装置的示意图。
54.图2示出了根据本发明实施方式的状态变量和滑动范围的图表。
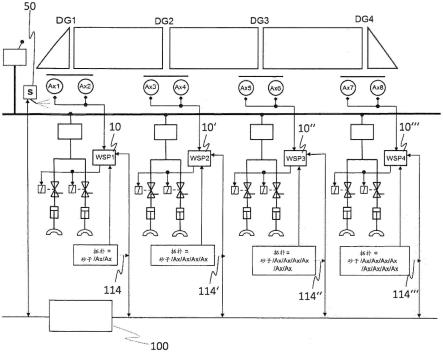
55.图3示出了具有多个防滑装置和一个用于排出附着优化剂的单元以及共同的调节装置的轨道车辆。
具体实施方式
56.图1示出了不仅与防滑系统10而且与铺砂设备50通信的调节装置100。铺砂设备50包括铺砂控制装置51和撒砂装置52。由转速传感器16形成的传感器装置和致动器装置18与防滑系统10连接。致动器装置18由调节制动装置12的制动缸中的压力的阀形成。致动器装置18可以由防滑系统10通过输出装置控制。
57.防滑系统10借助输入装置来接收状态变量和测量变量以进行处理。例如,转速传感器16将车轮24的转速传递给防滑系统10,其中,车轮24的转速值被传送给滑动调节装置22。另一未示出的传感器装置(或防滑系统10)将车辆26的行驶速度作为状态变量传递给防滑系统10,其中,车辆26的行驶速度值也传送给滑动调节装置22。
58.滑动选择装置34(构造为选择开关)将规定的滑动值28传送给滑动调节装置22并因此限定滑动调节装置22在控制致动器装置18时应使用的滑动范围。在这种情况下,所允许的滑动范围在滑动0(无滑动)和规定滑动28之间。存储第一滑动范围30(正常滑动)和第二滑动范围32(铺砂滑动)。借助于选择开关34选择两个目标滑动范围30、32(或其最大值30a、32a)中的一个。滑动范围的下限在滑动调节装置22中规定并且不必一起传送。第二滑动范围32(铺砂滑动)借助来自第二输出装置105的信息(即用于排出附着优化剂的单元的状态变量111,这里是当前的撒出的砂量)以及对应车轮组的位置来规定。
59.滑动调节装置22由状态变量24和26以及最大滑动28来计算优化滑动,其中,实现最佳制动效果而不超过最大滑动28,并由其来形成控制信号38,以便设置致动器装置18。
60.调节装置100具有:
61.第一输入装置101,用于接收状态信号36;
62.第二输入装置102,用于接收防滑系统110的检测到的状态变量;
63.第三输入装置103,用于接收用于排出附着优化剂的单元50的检测到的状态变量111。
64.调节装置100根据状态信号36和用于排出附着优化剂的单元的状态变量111(即这里是当前的撒出的砂量)来确定目标滑动或目标滑动范围112并将其经由第一输出装置104输出给防滑系统10。该信息也传递给选择开关34,该选择开关获得目标滑动是否应当完全受铺砂影响的信息。此外,该调节装置确定用于排出附着优化剂的单元50要排出的附着优化剂的量113,并通过第二输出装置105将其输出给用于排出附着优化剂的单元50。
65.第二输入装置102被适配于检测至少一个另外的状态变量114,并且第三输入装置103被适配于同样检测至少一个另外的状态变量115。
66.图1示出了在空间上与防滑系统10和铺砂设备50分开的调节装置100。然而,所述调节装置也可以在空间上正好设置在防滑系统10或铺砂设备50中,并且仍然对防滑系统10和铺砂设备50有影响。
67.图2示出了示例性用于防滑系统10中的过程的调节装置100的函数。在该示例中示出了由防滑装置调节的滑动与砂量之间的可能函数关系。
68.对于示例性经过的路程s,该图表分别分段地示出了最大滑动30、由滑动调节装置22确定的最佳滑动40、以及在所允许的滑动范围30的范围内的优化滑动42。
69.此外,图2示出了由此实现的制动力44以及车轮和轨道之间的接触的由环境影响确定的附着状态46。此外,图2示出了在对应的铺砂活动的情况下最佳存在的滑动41。
70.在第一路程段s0中,附着状态46良好。车轮与轨道的接触是干燥的。铺砂没有激活。滑动调节装置22基于期望的制动力fbr
目标
计算最佳滑动40。在该路程段中,最佳滑动40低于第一滑动范围30的最大值,同时形成最佳滑动42,因此在这种情况下不控制致动器装置18。
71.在第二路程段s1中,附着状态46较差。车轮和轨道之间的接触仅允许降低的力传
递,其例如由湿气或树叶引起。由滑动调节装置22计算的最佳滑动40现在由于车轮和轨道之间的降低的力传递而较高,但是仍然低于由第一滑动范围30确定的最大滑动。
72.优化滑动42因此由滑动调节装置22提高。但由于附着降低,制动力fbr同时降低。第一滑动范围30限定为使得在缩短制动路程的同时由在车轮的行驶面上的滑动引起的磨损尽可能小。为此目的,第一滑动范围30可以基于对应的工业标准限定。
73.第三路程段s2与第二路程段s1的不同仅在于,铺砂设备接通并且施加砂子。优化滑动42最初保持相同。由滑动调节装置22计算的最佳滑动40降低。制动力fbr略微增加,但仍然低于最大可能的制动力。
74.在第四路程段s3中,防滑系统10为铺砂进行准备,因为其已经获得砂子现在必须到达车轮上的信息。优化滑动42降低。制动力fbr增大并等于最大可能的制动力fbrmax。
75.在此,例如在通过防滑装置调节的滑动很小的情况下,可以激活大的砂量以优化力传递。在由防滑装置调节的滑动量很大的情况下,也可以施加小的砂量。
76.此外,还可以映射随时间变化的行为。因此例如砂量根据滑动累积的随时间变化的行为和/或在砂量随时间变化的行为中的滑动(所谓的“累积”)可以快速增加或也可以缓慢增加(如路程段s1和s2所示),因此路程段s1可以可变地设定。
77.图3示出了具有调节装置100、铺砂设备50和多个防滑系统10、10'、10"和10"'的轨道车辆。为了简单起见,没有示出调节装置100的所有输入和输出,但是可以看出,这些信息与所有防滑系统10、10'、10"和10"'以及铺砂设备50交换。特别是,由各个车轮组与调节装置100交换各个车轮组相对于铺砂设备50的位置。因此,这个概念不限于局部层级(一个车厢),而是可以扩展到分布在整个列车中的多个单元上。这里,例如,由防滑系统10、10'、10"和10"'检测的车轮组的位置信息114、114'、114"和114"'通过相应的防滑系统10、10'、10"和10"'传递给调节装置100(这里用虚线表示——这应指示该信息通过相应的防滑系统10、10'、10"和10"'传递)。
78.因此,砂量可以鉴于多个车厢的后面的车轮组的滑动曲线进行设定。在此,可以考虑诸如预期的“交叉改善”的效果,即由于多次碾压(对于后续车轮组是显而易见的)而导致的附着增加。由此,例如,即使在砂量减少时也可以实现期望的制动力(消耗最小化)。
79.本发明不限于上述实施方式。例如,信息的交换也可以扩展到轨道车辆的另外的系统、例如mg制动。
80.附图标记列表
81.10
ꢀꢀꢀꢀ
防滑系统
82.12
ꢀꢀꢀꢀ
制动装置
83.16
ꢀꢀꢀꢀ
转速传感器
84.18
ꢀꢀꢀꢀ
致动器装置
85.22
ꢀꢀꢀꢀ
滑动调节装置
86.24
ꢀꢀꢀꢀ
车轮的转速(状态变量)
87.26
ꢀꢀꢀꢀ
车辆的行驶速度(状态变量)
88.28
ꢀꢀꢀꢀ
规定的滑动
89.30
ꢀꢀꢀꢀ
第一滑动范围
90.32
ꢀꢀꢀꢀ
第二滑动范围
91.34
ꢀꢀꢀꢀ
滑动选择装置
92.36
ꢀꢀꢀꢀ
状态信号
93.38
ꢀꢀꢀꢀ
控制信号
94.40
ꢀꢀꢀꢀ
最佳滑动
95.42
ꢀꢀꢀꢀ
优化滑动(设定)
96.44
ꢀꢀꢀꢀ
制动力
97.46
ꢀꢀꢀꢀ
轮轨的附着状态/附着力
98.50
ꢀꢀꢀꢀ
用于排出附着优化剂的单元
99.51
ꢀꢀꢀꢀ
铺砂控制装置
100.52撒砂装置
101.100调节装置
102.101第一输入装置
103.102第二输入装置
104.103第三输入装置
105.104第一输出装置
106.105第二输出装置
107.110
ꢀꢀꢀ
防滑系统的状态变量
108.111
ꢀꢀꢀ
用于排出附着优化剂的单元的状态变量
109.112
ꢀꢀꢀ
目标滑动或目标滑动范围
110.113
ꢀꢀꢀ
附着优化剂的量(目标量)
111.114
ꢀꢀꢀ
另外的状态变量
112.115
ꢀꢀꢀ
另外的状态变量
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1