车辆运动控制装置和车辆运动控制方法与流程
本发明涉及通过统一控制搭载在汽车上的各个致动器,根据行驶状态使车辆运动优化的车辆运动控制装置及车辆运动控制方法。
背景技术:
1、近年来的汽车需要进一步改善乘客的乘坐舒适性和驾驶员的操作感,提出了通过仲裁多个控制请求来控制车辆运动的技术。
2、例如,在专利文献1的摘要中,记载了“在控制平台10中,位置控制请求仲裁部21仲裁并输出以位置为维度的多个控制请求,位置控制请求转换部22将来自位置控制请求仲裁部21的控制请求转换为以速度为维度的控制请求并输出。然后,速度控制请求仲裁部31仲裁并输出以速度为维度的多个控制请求,速度控制请求转换部32将来自速度控制请求仲裁部31的控制请求转换为以加速度为维度的控制请求并输出。接着,加速度控制请求仲裁部41仲裁并输出以加速度为维度的多个控制请求,加速度控制请求转换部42将来自加速度控制请求仲裁部41的控制请求转换为与实现加速度控制的控制装置相对应的维度(例如,转矩)的控制请求并输出”。此外,在该文献的图1中图示出了在控制平台10中的位置控制请求仲裁部21、速度控制请求仲裁部31、加速度控制请求仲裁部41等之间的连接关系。
3、即,在专利文献1中公开了一种控制请求仲裁装置,该控制请求仲裁装置对多个位置控制请求进行仲裁并生成速度控制请求,对多个速度控制请求进行仲裁并生成加速度控制请求,对多个加速度控制请求进行仲裁并生成转矩控制请求。
4、现有技术文献
5、专利文献
6、专利文献1:日本专利特开2011-63098号公报
技术实现思路
1、本发明所要解决的技术问题
2、在汽车行驶时,除了执行驱动和制动的各个控制外,还执行用于回转的转向控制。若车辆开始转向时,由于车辆的机械特性,车辆会在转向之后延迟而被动地发生侧向加速度、滚转、俯仰、偏航率等车辆运动,乘坐舒适性和操作感变差,因此需要一种车辆运动控制装置,根据行驶状态主动控制车辆运动,从而改善转向时的乘坐舒适性和操作感。
3、其中,专利文献1的控制平台是以直线行驶中车辆的驱动和制动为控制对象,并没有考虑转向控制,因此没有考虑将转向控制请求与位置、速度、加速度各控制请求进行仲裁。另外,专利文献1将各控制请求的仲裁顺序限定为上述顺序,无法任意设定,因此,假设在仲裁对象中包含转向控制请求的情况下,需要在连续发生的位置控制请求、速度控制请求、加速度控制请求的序列内的适当位置,插入仅间歇地产生的转向控制请求的仲裁顺序这样困难的设计。
4、鉴于上述问题,本发明的目的是提供一种车辆运动控制装置以及车辆运动控制方法,生成收敛在运动空间内的期望的可控制范围内的目标运动矢量,通过对各致动器的操作量进行统一控制,以实现该目标运动矢量所定义的车辆运动,从而改善乘坐舒适性和操作感。
5、解决技术问题的技术方案
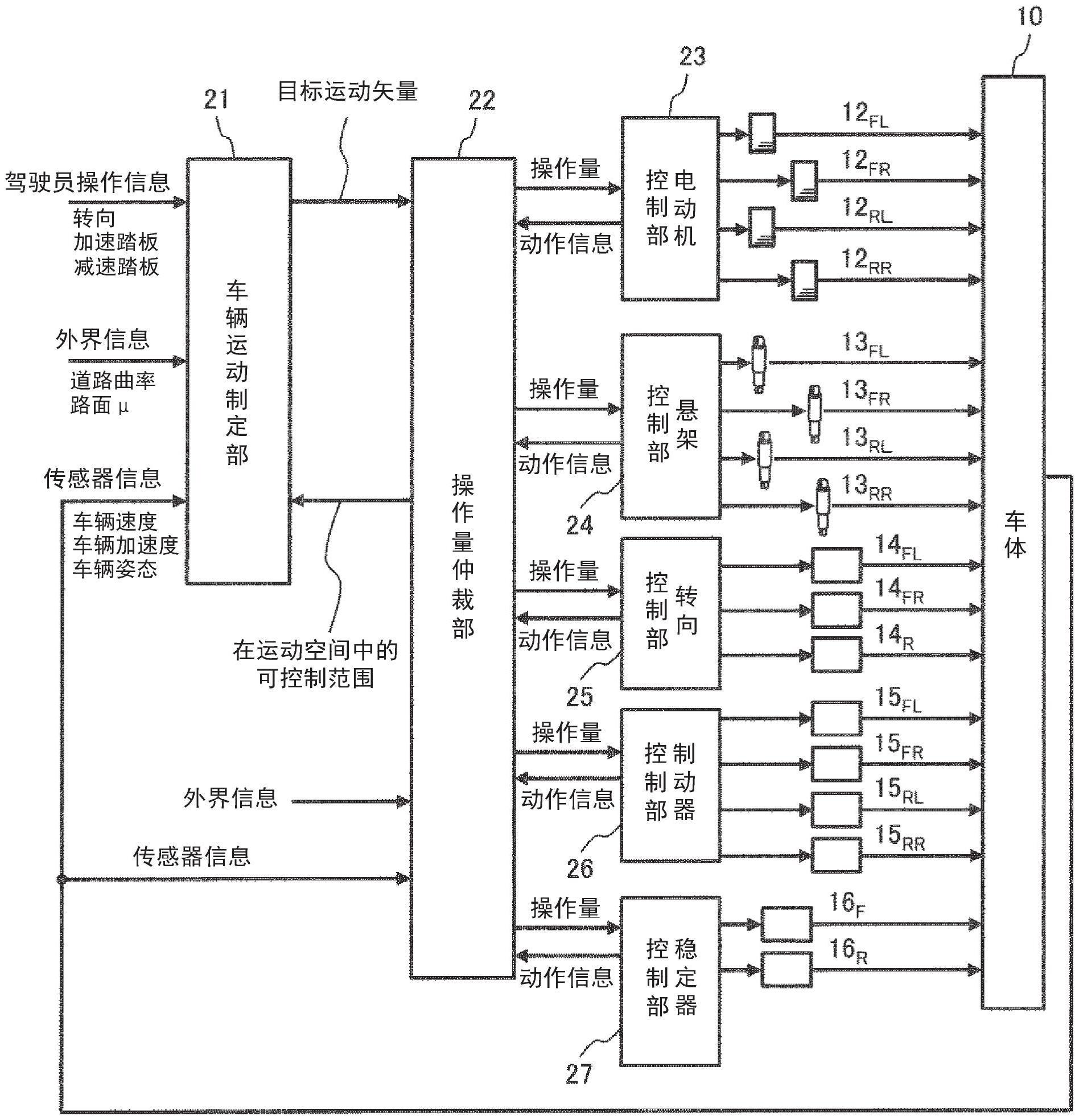
6、为了解决上述问题,本发明的车辆运动控制装置根据行驶状态对多个致动器进行统一控制,从而控制车辆运动,该车辆运动控制装置包括:车辆运动制定部,该车辆运动制定部基于所输入的行驶状态信息生成目标运动矢量;操作量仲裁部,该操作量仲裁部基于所述目标运动矢量计算各致动器的操作量;以及致动器控制部,该致动器控制部基于所述操作量控制各致动器,所述车辆运动制定部在从所述操作量仲裁部获取到的在运动空间中的可控制范围内生成所述目标运动矢量。
7、此外,本发明的车辆运动控制方法根据行驶状态统一控制多个致动器来控制车辆运动,该车辆运动控制方法包括:基于所输入的行驶状态信息,在运动空间的可控制范围内生成目标运动矢量的第一步骤;基于所述目标运动矢量计算各致动器的操作量的第二步骤;以及基于所述操作量控制各致动器的第三步骤。
8、发明效果
9、根据本发明的车辆运动控制装置以及车辆运动控制方法,生成收敛在运动空间内的期望的可控制范围内的目标运动矢量,通过对各致动器的操作量进行统一控制,以实现该目标运动矢量所定义的车辆运动,从而能改善乘坐舒适性和操作感。
技术特征:
1.一种车辆运动控制装置,根据行驶状态对多个致动器进行统一控制,从而控制车辆运动,该车辆运动控制装置的特征在于,包括:
2.如权利要求1所述的车辆运动控制装置,其特征在于,
3.如权利要求1所述的车辆运动控制装置,其特征在于,
4.如权利要求3所述的车辆运动控制装置,其特征在于,
5.如权利要求1所述的车辆运动控制装置,其特征在于,
6.如权利要求5所述的车辆运动控制装置,其特征在于,
7.如权利要求1所述的车辆运动控制装置,其特征在于,
8.如权利要求7所述的车辆运动控制装置,其特征在于,
9.一种车辆运动控制方法,根据行驶状态统一控制多个致动器来控制车辆运动,该车辆运动控制方法的特征在于,包括:
10.如权利要求9所述的车辆运动控制方法,其特征在于,
技术总结
本发明的目的是提供一种车辆运动控制装置,生成收敛在运动空间内的期望的可控制范围内的目标运动矢量,通过对各致动器的操作量进行统一控制,以实现该目标运动矢量所定义的车辆运动,从而改善乘坐舒适性和操作感。本发明的车辆运动控制装置根据行驶状态对多个致动器进行统一控制,从而控制车辆运动,其特征在于,包括:基于所输入的行驶状态信息生成目标运动矢量的车辆运动制定部;基于所述目标运动矢量计算各致动器的操作量的操作量仲裁部;基于所述操作量控制各致动器的致动器控制部,所述车辆运动制定部在从所述操作量仲裁部获取到的在运动空间中的可控制范围内生成所述目标运动矢量。
技术研发人员:山崎胜,伊藤贵广,前田健太,大下修治,上野健太郎
受保护的技术使用者:日立安斯泰莫株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!