自动泊车方法、装置、车辆及存储介质与流程
本技术涉及泊车,特别涉及一种自动泊车方法、装置、车辆及存储介质。
背景技术:
1、随着自动泊车技术的提升和发展,其在车辆上应用的范围也越来越广。相关技术中,可以使用一种对汽车横纵向智能控制的方式实现自动泊车,其中,纵向控制可以匹配tcu(transmission control unit,自动变速箱控制单元)控制和ecu(electronic controlunit,电子控制单元)控制;tcu可以有经济、标准和运动三种动力驾驶模式,在确定选择一种驾驶模式的基础上,可以匹配对tcu的控制或可以同时适配三种驾驶模式。
2、但是,在泊车过程中,若相关技术中的tcu仅仅执行换挡操作,车辆通过esp(electronic stability program,车身电子稳定系统)实现起步和控速,则可能会出现车辆发动机怠速转速、怠速爬行最大扭矩、离合器接合比分比等参数在泊车全过程中不做匹配,导致在短路线规划时,车辆因动力过强引起起步冲、急刹;若同时控制tcu换挡和动力结合程度变化,则在车型配置多种驾驶模式的情况下,需要同时匹配不同驾驶模式的动力表现,使得联调工时成倍增加。
技术实现思路
1、本技术提供一种自动泊车方法、装置、车辆及存储介质,以解决相关技术中,驾驶模式参数和泊车模式需求参数不匹配,使得泊车控速和驾驶模式怠速出现动力冲突,可能出现车辆动力过强引起步冲、急刹,或出现不同动力表现下联调工时增加,导致驾驶模式下动力变更对泊车性能产生影响,用户使用感受较差等问题。
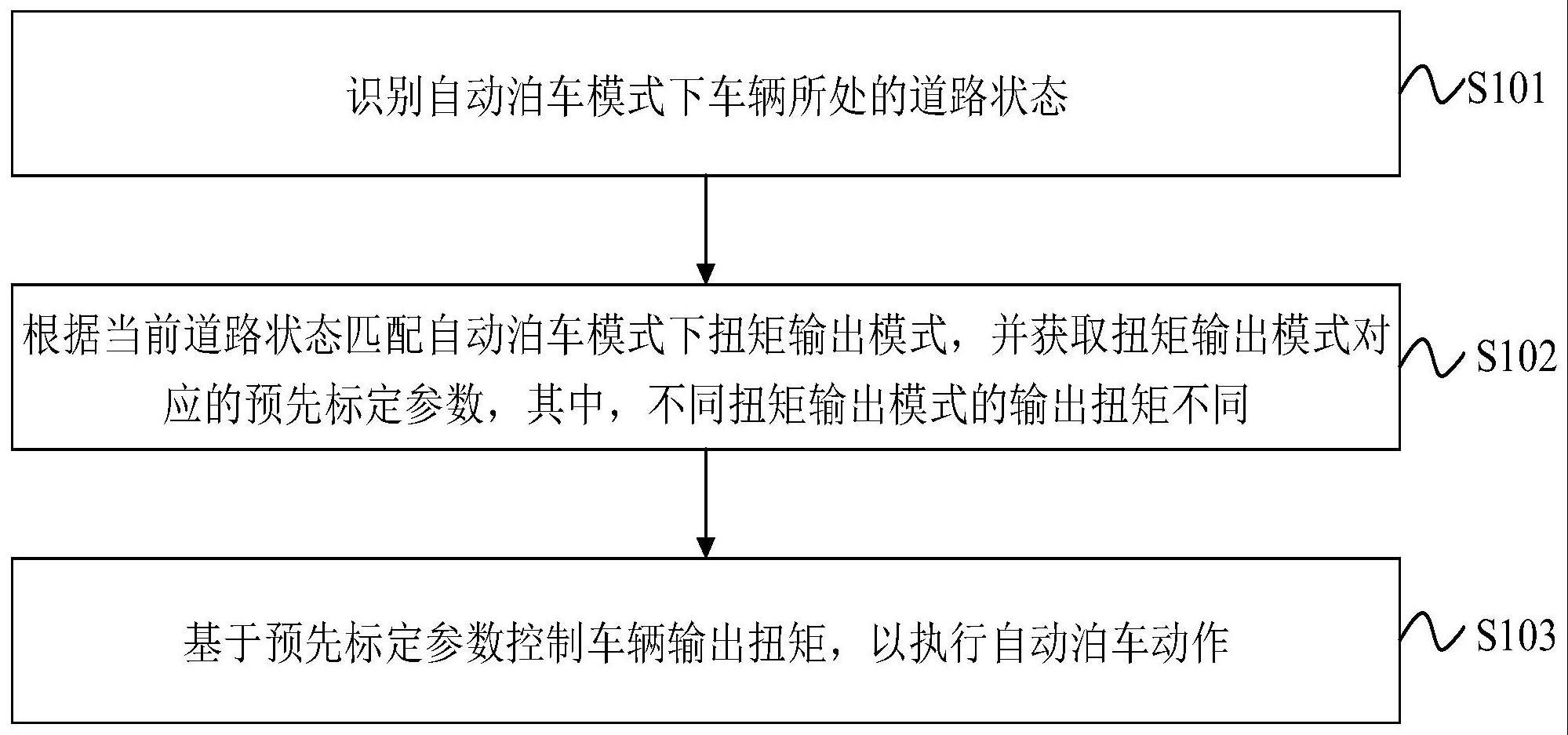
2、本技术第一方面实施例提供一种自动泊车方法,包括以下步骤:识别自动泊车模式下车辆所处的道路状态;根据当前道路状态匹配所述自动泊车模式下扭矩输出模式,并获取所述扭矩输出模式对应的预先标定参数,其中,不同扭矩输出模式的输出扭矩不同;基于所述预先标定参数控制所述车辆输出扭矩,以执行自动泊车动作。
3、根据上述技术手段,本技术实施例可以通过匹配道路状态给出预先标定参数,使车辆在进入泊车控制后自动跳转至相应控制模式,输出适配的相应车辆参数以对车辆进行泊车控制;由此,本技术实施例的车辆可以在自动泊车时进入自动泊车控制模式,与驾驶模式完全区分,有效降低车辆动力以满足泊车控速度的低速性能要求,使得泊车控诉和驾驶模式的怠速动力冲突得以解决,且在此自动泊车模式下,驾驶模式下的动力变更不再对泊车性能产生影响,提升了泊车智能性和安全性,使得车辆泊车过程动力更舒适,起步、刹车更平稳,满足实际使用需要,提升用户使用体验。
4、可选地,所述道路状态包括平坦路面状态和非平坦路面状态,所述扭矩输出模式包括第一输出模式和第二输出模式,所述根据所述当前道路状态匹配所述自动泊车模式下扭矩输出模式,包括:若所述当前道路状态为所述平坦路面状态,则所述扭矩输出模式为所述第一输出模式;若所述当前道路状态为所述非平坦路面状态,则所述扭矩输出模式为所述第二输出模式,其中,所述第二输出模式的输出扭矩大于所述第一输出模式的输出扭矩。
5、根据上述技术手段,本技术实施例可以对路面状态进行分类,并区分路面状态不同时的匹配模式,以便于对车辆在进入自动泊车状态后自动进入对应模式、匹配对应参数并对车辆作出控制,由此可以完全区分驾驶模式和自动泊车模式,提升自动泊车匹配速度,满足实际使用需要。
6、可选地,所述第一输出模式的预先标定参数包括扭矩最大值、扭矩最小值、扭矩限值、加速度、开环控制轴速阀值和扭矩上升斜率中的一种或多种,在获取所述扭矩输出模式对应的预先标定参数,包括:基于油温的一维表标定所述第一输出模式下的怠速请求的扭矩最大值;基于坡度和目标挡位的二维表标定所述第一输出模式下的怠速请求的扭矩最小值;标定所述第一输出模式下转速上升阶段的怠速请求的扭矩限值;基于转速同步进程和实际挡位的二维表标定所述第一输出模式下的加速度;标定所述第一输出模式下的开环控制轴速阀值;基于油温和实际挡位的二维表标定所述第一输出模式下开环控制阶段的扭矩上升斜率。
7、根据上述技术手段,本技术实施例可以适配发动机怠速转速、怠速爬行最大最小扭矩等参数,匹配路面平整状态下,自动泊车参数数据,由此,本技术实施例可以在车辆进入自动泊车状态时,自动匹配路面平整时相应泊车控制数据,对车辆作出泊车控制,降低车辆动力,满足泊车控速的低速性能要求,节约资源的同时满足实际使用需要。
8、可选地,所述第二输出模式的预先标定参数包括起步离合器扭矩请求斜率和/或起步发动机转速,在获取所述扭矩输出模式对应的预先标定的扭矩输出曲线之前,还包括:标定所述第二输出模式下起步离合器扭矩请求斜率,其中,所述自动泊车模式下的起步离合器扭矩请求斜率与非自动泊车模式下的起步离合器扭矩请求斜率不同,且优先级高于所述非自动泊车模式下的扭矩请求斜率;标定所述第二输出模式下起步发动机转速,其中,所述自动泊车模式下的起步发动机转速与所述非自动泊车模式下的起步发动机转速不同,且优先级高于所述非自动泊车模式下的起步发动机转速。
9、根据上述技术手段,本技术实施例可以适配路面不平整状态下的自动泊车参数数据,由此,本技术实施例可以在车辆进入自动泊车状态时,自动匹配路面非平整时的相应泊车控制数据,对车辆作出泊车控制,降低车辆动力,满足泊车控速的低速性能要求,节约资源的同时满足实际使用需要,提升用户使用体验。
10、本技术第二方面实施例提供一种自动泊车装置,包括:识别模块,用于识别自动泊车模式下车辆所处的道路状态;获取模块,用于根据当前道路状态匹配所述自动泊车模式下扭矩输出模式,并获取所述扭矩输出模式对应的预先标定参数,其中,不同扭矩输出模式的输出扭矩不同;执行模块,用于基于所述预先标定参数控制所述车辆输出扭矩,以执行自动泊车动作。
11、可选地,所述道路状态包括平坦路面状态和非平坦路面状态,所述扭矩输出模式包括第一输出模式和第二输出模式,所述获取模块进一步用于:判断若所述当前道路状态为所述平坦路面状态,则所述扭矩输出模式为所述第一输出模式;若所述当前道路状态为所述非平坦路面状态,则所述扭矩输出模式为所述第二输出模式,其中,所述第二输出模式的输出扭矩大于所述第一输出模式的输出扭矩。
12、可选地,所述第一输出模式的预先标定参数包括扭矩最大值、扭矩最小值、扭矩限值、加速度、开环控制轴速阀值和扭矩上升斜率中的一种或多种,所述获取模块进一步用于:基于油温的一维表标定所述第一输出模式下的怠速请求的扭矩最大值;基于坡度和目标挡位的二维表标定所述第一输出模式下的怠速请求的扭矩最小值;标定所述第一输出模式下转速上升阶段的怠速请求的扭矩限值;基于转速同步进程和实际挡位的二维表标定所述第一输出模式下的加速度;标定所述第一输出模式下的开环控制轴速阀值;基于油温和实际挡位的二维表标定所述第一输出模式下开环控制阶段的扭矩上升斜率。
13、可选地,所述第二输出模式的预先标定参数包括起步离合器扭矩请求斜率和/或起步发动机转速,所述获取模块进一步用于:标定所述第二输出模式下起步离合器扭矩请求斜率,其中,所述自动泊车模式下的起步离合器扭矩请求斜率与非自动泊车模式下的起步离合器扭矩请求斜率不同,且优先级高于所述非自动泊车模式下的扭矩请求斜率;标定所述第二输出模式下起步发动机转速,其中,所述自动泊车模式下的起步发动机转速与所述非自动泊车模式下的起步发动机转速不同,且优先级高于所述非自动泊车模式下的起步发动机转速。
14、本技术第三方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的自动泊车方法。
15、本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的自动泊车方法。
16、由此,本技术至少具有如下有益效果:
17、(1)本技术实施例可以通过匹配道路状态给出预先标定参数,使车辆在进入泊车控制后自动跳转至相应控制模式,输出适配的相应车辆参数以对车辆进行泊车控制;由此,本技术实施例的车辆可以在自动泊车时进入自动泊车控制模式,与驾驶模式完全区分,有效降低车辆动力以满足泊车控速度的低速性能要求,使得泊车控诉和驾驶模式的怠速动力冲突得以解决,且在此自动泊车模式下,驾驶模式下的动力变更不再对泊车性能产生影响,提升了泊车智能性和安全性,使得车辆泊车过程动力更舒适,起步、刹车更平稳,满足实际使用需要,提升用户使用体验;
18、(2)本技术实施例可以对路面状态进行分类,并区分路面状态不同时的匹配模式,以便于对车辆在进入自动泊车状态后自动进入对应模式、匹配对应参数并对车辆作出控制,由此可以完全区分驾驶模式和自动泊车模式,提升自动泊车匹配速度,满足实际使用需要;
19、(3)本技术实施例可以适配发动机怠速转速、怠速爬行最大最小扭矩等参数,匹配路面平整状态下,自动泊车参数数据,由此,本技术实施例可以在车辆进入自动泊车状态时,自动匹配路面平整时相应泊车控制数据,对车辆作出泊车控制,降低车辆动力,满足泊车控速的低速性能要求,节约资源的同时满足实际使用需要;
20、(4)本技术实施例可以适配路面不平整状态下的自动泊车参数数据,由此,本技术实施例可以在车辆进入自动泊车状态时,自动匹配路面非平整时的相应泊车控制数据,对车辆作出泊车控制,降低车辆动力,满足泊车控速的低速性能要求,节约资源的同时满足实际使用需要,提升用户使用体验。
21、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!