循环悬架车身控制系统的制作方法
本发明涉及一种车身控制系统,属于汽车。
背景技术:
1、魔术车身控制系统(magic body control)。参考有驾百科 2023 年 1 月 5 日在网络上发表的内容,奔驰的魔术车身控制系统由多个传感器和执行器组成。传感器由内后视镜后方的前视双目立体摄像头、三轴加速度传感器和车身高度传感器构成。执行器由弹簧支撑杆、电子控制器和由液压管路、机油泵、冷却器、机油储槽及控制阀组成的液压伺服机制构成。液压伺服机制可由电子控制器控制快速地通过液压调节车身高度。具体工作原理是通过液压阀调节机油量和压力,从而当车轮受到障碍上升时,快速抬高弹簧支撑杆中的活塞,此时车身的垂直运动实际被抵消而大幅消减了。通过一系列传感器对车身运动及水平角度进行监测,颠簸所带来的振动会经过车轮、液压挺柱和车身三部分,而在这个过程中振幅会逐级进行递减。最后带来的效果是,车身始终保持水平且平稳的状态,悬挂和车轮则负责颠簸的过滤。
2、魔术车身控制系统是建立在现有悬架的基础上,依托多种电控设备的辅助对车身进行调控的一种升级式方案,弊端是沿用传统悬架的机械结构,作用力传导的规则具有局限性,对电控设备的依赖度较大,所使用的技术和成本都较高,造成的结果就是不易被普及使用。悬架的机械结构决定了作用力的传导规则,现有的悬架在功能上大同小异,大同:都是使用减震器直接缓冲作用力的设计方式,小异:不同的悬架结构传导作用力的规则略有不同。现有车身控制系统问题的核心是仍然使用车身悬置的基础架构,车身位于悬架上方处于自由运动的状态,车身受到各种作用力的影响,减震器只是延缓作用力的传导,减震器两端承受作用力的方向处在相同的运动轨迹上,现有悬架对作用力的传导属于通路机制,串联的减震方式无法形成作用力的断路机制,机械结构中更没有限制作用力的回路机制,所以只能依靠电控设备对车身进行辅助控制。
技术实现思路
1、本发明公开了一种循环悬架车身控制系统,以解决现有车身控制系统依赖电控设备不能单独通过机械结构对车身重心分配和平衡姿态的控制。
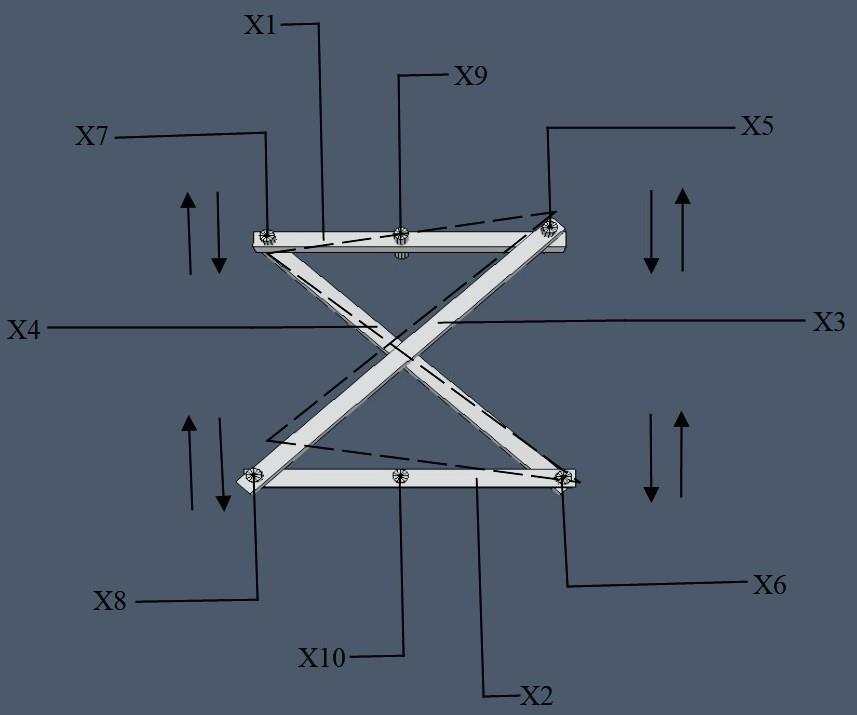
2、本发明循环悬架车身控制系统的技术核心是 x 型平面铰链连杆机构。x 型平面铰链连杆机构是一种基础的 4 连杆交叉组合结构,如图 1所示,4 根连杆中的 2 根连杆呈现 x 型交叉状,其他 2 根连杆相互平行,交叉状的 2 根连杆在交叉点并不相连接,各连杆均在相互平行的平面内运动,以铰链连接。x 型平面铰链连杆机构存在多种形变方式,本发明循环悬架车身控制系统就是通过 x 型平面铰链连杆机构 4 种形变规则的相互叠加实现车轮与车架形成相互独立控制的并联关系,通过机械结构产生对于车轮灵活运动的通路机制和对车架平衡限制的断路机制,并在车轮和车架的并联关系中实现作用力相互抵消的回路机制。
3、举例说明 x 型平面铰链连杆机构,如图 1所示,x 型平面铰链连杆机构包含 x1、x2、x3 和 x4,4 根连杆,x1 和 x2 为不相交叉的连杆,x3 和 x4 为相交叉且不相连接的连杆,x5、x6、x7 和 x8 是 4 根连杆的连接点,x9 为 x1 连杆的轴心点,x10 为 x2 连杆的轴心点,4 根连杆均在相互平行的平面内运动,以铰链连接。虚线为 x 型平面铰链连杆机构形变示意。
4、x 型平面铰链连杆机构的第一形变规则,如图 2所示,x1 连杆在上方,x2 连杆在下方,当 x3 连杆发生纵向位移时,x1 连杆以 x7 点为轴心和 x2 连杆以 x6 点为轴心产生随动,当 x4 连杆发生纵向位移时,x1 连杆以 x5 点为轴心和 x2 连杆以 x8 点为轴心产生随动。第一形变规则阐述的是 x 型平面铰链连杆机构中 x3 连杆和 x4 连杆在纵向产生平行位移时互不影响,可以把 x3 连杆视作与车轮相连接,x4 连杆与车架相连接,x3连杆和 x4 连杆形成并联的关系,第一形变规则可以实现车轮和车架的独立控制。
5、x 型平面铰链连杆机构的第二形变规则,如图 3所示,x1 连杆在左侧,x2 连杆在右侧,当 x2 连杆保持固定不动状态时,x1 连杆产生围绕 x2 连杆的圆弧运动,x1 连杆上端的 x5 点以 x3 连杆为半径围绕 x2 连杆下端的 x8 点做圆弧运动,x1 连杆下端的 x7点以x4 连杆为半径围绕 x2 连杆上端的 x6 点做圆弧运动,x1 连杆的轴心 x9 点围绕着x2 连杆的轴心 x10 点做圆弧运动,x3 连杆和 x4 连杆同步发生同方向角度变化,x1 连杆上端的 x5点、轴心 x9 点和下端的 x7 点产生 3 条不同的圆弧轨迹。第二形变规则阐述的是 x1 连杆围绕 x2 连杆发生圆弧运动时,x9 点和 x10 点模拟单连杆运动端围绕固定端产生的圆弧运动,可以把 x1 连杆视作与车轮间接连接,x2 连杆与车架间接连接,x1连杆两端 x5 点和 x7 点的运动轨迹适应 x9 点的运动状态,第二形变规则可以形成对车轮的一组通路机制。
6、x 型平面铰链连杆机构的第三形变规则,如图 4所示,x1 连杆在左侧,x2 连杆在右侧,当 x9 点的位置不变,x1 连杆以 x9 点为轴心,x2 连杆在纵向发生垂直位移时,x1连杆产生围绕 x9 点为轴心的圆周运动,x1 连杆圆周运动所产生的与 x2 连杆位移方向的夹角呈增大原则,x1 连杆轴心 x9 点与 x2 连杆的垂直距离不发生变化。第三形变规则阐述的是 x2 连杆纵向的垂直位移转变为 x1 连杆的圆周运动,可以把 x2 连杆视作与车轮间接连接,x1 连杆与车架间接连接,第三形变规则可以改变车轮对车架作用力的方向。
7、x 型平面铰链连杆机构的第四形变规则,如图 5所示,x1 连杆在左侧,x2 连杆在右侧,当 x9 点和 x10 点保持位置不变,x1 连杆以 x9 点为轴心,x2 连杆以 x10 点为轴心,x1 连杆围绕轴心 x9 点同步发生与 x2 连杆围绕轴心 x10 点反向角度圆周运动,x9点与 x10点的距离保持不变。第四形变规则阐述的是 x1 连杆和 x2 连杆在各自轴心 x9点和 x10 点位置不变的情况下同步发生反向圆周运动,可以把 x1 连杆视作与车轮间接连接,x2 连杆与车架间接连接,第四形变规则可以形成对车架的一种锁止机制。
8、本发明循环悬架车身控制系统不是沿用现有车身控制系统的对传统悬架进行升级或者改造的设计思路,而是通过 x 型平面铰链连杆机构的 4 种形变规则从基础架构上改变悬架的机械结构形成全新的作用力传导规则,侧重机械的方式可以减少对电控设备的依赖,有效的降低和调控车辆的重心分配,强化车辆过弯的车身姿态,增强车辆的安全性,提高车辆的行驶品质和舒适性,降低成本,提高普及率,同样具备丰富的电控设备拓展空间。
技术特征:
1.一种循环悬架车身控制系统,包括4组悬架机械结构与车架连接,其特征在于:每组悬架机械结构由主体结构、车轮控制单元、车架控制单元组成。
2.根据权利要求1所述的一种循环悬架车身控制系统,主体结构包括1号车架连杆、2号车轮连杆、3号结构连杆、4号结构连杆,其特征在于:1号车架连杆、2号车轮连杆、3号结构连杆、4号结构连杆组成x型平面铰链连杆机构。
3.根据权利要求1所述的一种循环悬架车身控制系统,车轮控制单元包含7号扭力连杆、8号减震连杆、9号结构连杆、10号结构连杆、11号阻尼器,12号减震弹簧,其特征在于:7号扭力连杆、8号减震连杆、9号结构连杆、10号结构连杆组成x型平面铰链连杆机构。
4.根据权利要求1所述的一种循环悬架车身控制系统,车架控制单元包含13号控制连杆、14号平衡连杆、15号结构连杆、16号结构连杆、17号限位器、18号滑轨槽、19号滑轨槽、20号滚轮、21号滚轮,其特征在于:13号控制连杆、14号平衡连杆、15号结构连杆、16号结构连杆组成x型平面铰链连杆机构。
5.根据权利要求1所述的一种循环悬架车身控制系统,每组悬架机械结构包括主体结构、车轮控制单元、车架控制单元,其特征在于:车轮控制单元和车架控制单元以并列的形式安装在主体结构上。
6.根据权利要求3所述的一种循环悬架车身控制系统,车轮控制单元包含7号扭力连杆、8号减震连杆、9号结构连杆、10号结构连杆,11号阻尼器,12号减震弹簧,其特征在于:11号阻尼器和12号减震弹簧可以影响7号扭力连杆、8号减震连杆、9号结构连杆、10号结构连杆组成x型平面铰链连杆机构的形变。
7.根据权利要求4所述的一种循环悬架车身控制系统,车架控制单元包含13号控制连杆、14号平衡连杆、15号结构连杆、16号结构连杆、17号限位器、18号滑轨槽、19号滑轨槽、20号滚轮、21号滚轮,其特征在于:在17号限位器上18号滑轨槽和19号滑轨槽中的20号滚轮和21号滚轮可以在13号控制连杆产生圆周运动时产生锁止效应。
技术总结
本发明公开了一种循环悬架车身控制系统,涉及对车身的控制方式,属于汽车技术领域。解决现有车身控制系统依赖电控设备不能单独通过机械结构对车身重心分配和平衡姿态的控制。本发明循环悬架车身控制系统基于X型平面铰链连杆机构的形变规则为核心架构,通过形变规则的叠加实现悬架对车轮与车架的独立控制,利用悬架中连杆的位移运动与连杆的角度变化不属于同类运动方式,实现车轮的运动不影响车架的状态,车架的姿态受到悬架作用力回路的限制,依托车架的传导建立悬架之间的联动效应,实现对车身的组合控制。循环悬架车身控制系统可以调控车辆重心分配,强化车辆过弯姿态,增强车辆安全性,提高车辆行驶品质,降低成本,具备丰富的电控拓展空间。
技术研发人员:俞吉
受保护的技术使用者:俞吉
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!