基于V2X的ADAS在前车遮挡场景下的决策控制方法与流程
基于v2x的adas在前车遮挡场景下的决策控制方法
技术领域
1.本发明属于自动驾驶技术领域,涉及基于v2x透视感知技术的高级驾驶辅助系统(adas+)在前车遮挡场景下的决策控制技术,以及高级驾驶辅助系统(adas+)和具有该系统的汽车。
背景技术:
2.安全行驶是汽车用户的第一刚性需求。在行驶过程中,追尾是造成交通事故的主要因素。尤其在高速公路上或其他高速行驶场景,绝大部分的交通事故是由追尾造成,而且往往是多车连环碰撞,伤亡和损失严重。造成的原因,往往是跟车太近,或驾驶员精力不集中。
3.尽管现有技术试图解决这一问题,如前车碰撞报警(fcw)和紧急制动辅助(aeb),但受物理因素限制,系统反应不及时,这些技术往往还是无法避免追尾事故的发生。譬如,本车sv高速跟随前方车辆tv2行驶,tv2跟随其前方的车辆tv1行驶,以此类推。如果最前方车辆tv1因突发情况发生紧急制动,紧邻前方车辆tv2随后也可能发生紧急制动,本车sv要等到前方tv2出现紧急制动一定时间后,驾驶员或adas系统才能觉察并开始做出判断和反应。如果sv-tv2-tv1之间的车距比较近,本车sv即使配备带有aeb功能的adas系统,也可能无法避免与tv2的追尾碰撞。高速公路上的连环追尾事故,大多是出于这样的场景。
4.自动驾驶车、路、智慧城市网联融合一体化是当前跨行业的发展趋势。智能+网联+大数据+云平台技术发展和成熟是实现“智能汽车+”的技术基础和保障。智能驾驶技术是智能网联汽车的核心技术领域之一。其中,环境感知和控制决策是智能驾驶系统的核心技术瓶颈。当前在智能驾驶技术领域,系统环境感知能力远不成熟,是技术瓶颈中的瓶颈,也是实现智能驾驶的关键制约因素。单车感知(车载传感器)和车路协同(v2x)各有其局限性,两者的组合才能实现智能感知技术的突破和飞跃,是智能驾驶目前最可行系统解决方案和技术路线和方向。也就是说,实现为汽车智能驾驶赋能的环境感知能力,需要通过车载传感器和车路协同信息技术的融合,从而大大增强汽车的感知能力,最终达到大幅度增强汽车智能驾驶的功能、性能和安全可靠度。同时,车路协同应用普及后可以大大降低单车智能感知的成本。
5.开发基于车路协同的智能网联汽车,实现智能驾驶技术,解决场景超级复杂多变的问题是一个漫长的道路和过程。尽管实现全自动驾驶是智能网联汽车技术发展方向,但这是一个长远目标,实现普遍的商业化应用还需要很长的路要走。市场需求是推动技术进步和落地的决定因素。最近行业开始形成共识,通过v2x技术,解决关键危险场景的行车安全、交通拥堵和提高交通效率等问题,是最重要的市场刚需,也是交通出行中安全行车的最大痛点问题,这是今后几十年内需要逐步解决的问题。也就是说,解决关键危险场景的行车安全问题为当前关键的目标,并促进技术的产业化落地。
6.adas(高级辅助驾驶系统)是解决行车安全的典型系统驾驶员辅助系统,也是实现自动驾驶的技术基础,最近正在迅速发展,并且市场巨大。然而,尽管adas系统产品在市场
上应用已经多年,但其技术还远不够成熟,adas的功能和性能也是严重受制于系统的感知能力。尤其在一些特殊的危险场景下,adas无法实现有效避免碰撞。通过v2x技术,车载系统与路侧感知信息实现融合感知,可以突破系统在一些高风险场景中在感知和决策算法上的技术瓶颈,开发在功能得到拓展和和在性能上得到加强的adas+系统。
7.现有adas技术依赖于其车载感知设备,受其环境感知范围和能力的局限,在很多关键危险场景下无法发挥作用。譬如在交叉路口汇入车辆视野遮挡的场景、前车被遮挡的场景、红绿灯被遮挡的场景、十字路口闯红灯等场景等。这些场景中,物理条件决定了基于自身车载感知的adas系统在突发情况下无法有效地起到避撞的作用。
8.v2x技术能够帮助克服以上场景中的环境感知障碍,系统性地提升汽车的环境感知能力。但目前v2x技术的应用,主要关注点在帮助实现动驾驶技术,可自动驾驶技术的普遍商业化应用落地,还来日方长。由此可见,v2x与adas系统的结合,在技术上和商业化应用落地上都具备非常广阔的潜力和发展空间。
技术实现要素:
9.本发明的目的是基于v2x与车载感知的系统性深度融合,解决传统adas系统技术无法解决的高危场景之一,开发加强的更可靠的adas+系统功能决策和控制算法技术。
10.根据本发明的一个方面,提供一种基于v2x的adas在前车遮挡场景下的决策控制方法,包括:
11.基于v2x透视感知技术,协同感知前方被遮挡车辆的行车状态信息,与本车车载感知的潜在冲突车辆的行车状态信息进行融合;
12.基于融合得到的信息,进行潜在冲突车辆的行为判断;
13.根据判断结果制定本车的控制策略。
14.进一步地,可通过v2x透视感知技术与潜在冲突车辆实现v2v实时通信和信息交互或与路侧单元设备实现v2i的实时通信和信息交互,获取潜在冲突车辆的行车状态信息;
15.通过v2x透视感知技术与前方被遮挡车辆实现v2v实时通信和信息交互,或与路侧单元设备实现v2i的实时通信和信息交互,获取前方被遮挡车辆的行车状态信息。
16.进一步地,所述控制决策包括预警、温和减速和紧急制动。
17.进一步地,当d0
02
<d0
02-alert
,启动对驾驶员的预警;
18.其中,d0
02
为本车与潜在冲突车辆的相对距离,d0
02-alert
为预警距离,d0
02-alert
=d
stop-d2
stop
+d
pre1
,其中d
pre1
为提前预警的预设常值,d
stop
为本车减速到静止的行驶距离,d2
stop
为潜在冲突车辆减速到停止的行驶距离。
19.进一步地,如果潜在冲突车辆出现紧急制动,且与其前车距离小于预设值,启动对驾驶员预警。
20.进一步地,当d0
02
<d0
02-mild
,启动温和减速控制;
21.其中,d0
02
为本车与潜在冲突车辆的相对距离,d0
02-mild
为温和减速控制触发距离,d0
02-mild
=d
stop-d2
stop
,d
stop
为本车减速到静止的行驶距离,d2
stop
为潜在冲突车辆减速到停止的行驶距离。
22.进一步地,根据两车相对间距和相对速度实时调节温和减速的减速度;
23.当d0
02
>d0
02-mild
+d
pre2
时,停止减速,d
pre2
为预设常值。
24.进一步地,当本车减速度的绝对值的最小值|a
min
|>a_aeb,启动紧急制动控制,其中a_aeb为设定值。
25.根据本发明的另一方面,提供一种基于v2x透视感知技术的高级驾驶辅助系统,可执行以上所述的决策控制方法。
26.根据本发明的又一方面,提供一种智能网联汽车,包括以上所述的基于v2x透视感知技术的高级驾驶辅助系统;
27.车载感知单元和路侧感知单元,经v2x关联及融合感知,为所述高级驾驶辅助系统提供遮挡区域的目标物信息。
28.本发明通过v2x技术的应用,实现车载感知与路侧感知技术的融合,获得更精确更可靠,全天候的环境感知信息,解决在关键危险场景的感知障碍。特别是在前车视线遮挡的场景,实现传统adas(基于车载感知)无法实现的功能或加强传统adas功能的性能和可靠性。
29.本发明的方法基于v2x感知信息,进行潜在冲突车辆的行为判断,从而开发本车的控制决策算法技术。一方面综合考虑舒适、安全和避撞要求,同时适用于adas和自动驾驶系统的应用。本发明的车辆决策控制算法策略通过车辆运动轨迹进行实时动态计算和优化。
30.本发明的方法在启动紧急制动之前,在必要的情况下,可以应用制动预控制策略,提高系统反应速度,降低制动时延,提高避撞性能。
附图说明
31.通过结合附图对本公开示例性实施方式进行更详细的描述,本公开的上述以及其它目的、特征和优势将变得更加明显,其中,在本公开示例性实施方式中,相同的参考标号通常代表相同部件。
32.图1是汽车行驶和道路场景的示意图。
33.图2是本发明实施例的系统信息交互图。
34.图3是本发明实施例的车辆运动关系图。
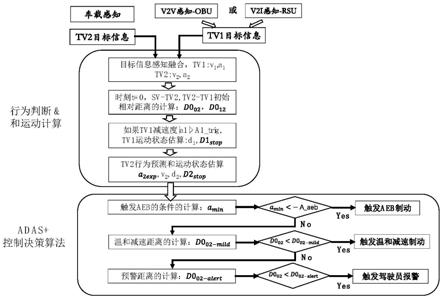
35.图4是本发明实施例的系统感知信息处理和控制决策流程。
具体实施方式
36.下面将参照附图更详细地描述本公开的优选实施方式。虽然附图中显示了本公开的优选实施方式,然而应该理解,可以以各种形式实现本公开而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本公开更加透彻和完整,并且能够将本公开的范围完整地传达给本领域的技术人员。
37.本发明中,相关技术术语的名词解释。
38.v2x:vehicle to everything,车辆与外界的信息通信交互(x表示外界所有事物,包括:v2v,v2i,v2n,v2p等等)。
39.v2v:vehicle to vehicle,车辆与其他车辆的信息通信和信息交互。
40.v2i:vehicle to infrastructure,车辆与周边路侧设施的通信和信息交互。
41.v2n:vehicle to network,车辆与电信网络的通信和信息交互。
42.v2p:vehicle to people,车辆与其他车辆的通信和信息交互。
43.aeb:automatic emergency braking,自动紧急制动。
44.实现智能驾驶,核心技术瓶颈很多,其中环境感知技术是核心的核心,也是智能驾驶系统落地的制约因素。本发明的目的在于通过车载传感和v2x技术(v2v或v2i)的融合感知,获得本车对环境的透视感知和提前感知能力,预测跟随的前方车辆tv2的行为,从而使本车提前做出判断和反应,最大限度到达避免与前车碰撞的目的。本发明提供了该场景下的前方车辆tv2行为的预测、判断和控制决策技术。
45.本发明提供一种基于v2x的adas前车遮挡场景下的决策控制方法,包括:基于v2x透视感知技术,协同感知前方被遮挡车辆的行车状态信息,与本车车载感知的潜在冲突车辆的行车状态信息进行融合;基于融合得到的信息,进行潜在冲突车辆的行为判断;根据判断结果制定本车的控制决策。
46.为便于理解本发明实施例的方案及其效果,以下给出一个具体应用示例。本领域技术人员应理解,该示例仅为了便于理解本发明,其任何具体细节并非意在以任何方式限制本发明。
47.如图1所示,道路上有至少三车车在同一车道上行驶,本车为sv。本车跟随其紧邻前方车辆tv2行驶,而车辆tv2跟随前方其他车辆行驶,如tv1。三辆车的行驶速度较高,且间距较近。例如,在高速公路上或其他限速较高的道路上行驶的场景。
48.本车sv上配备带紧急制动功能(aeb)的adas系统,但tv1车辆的视线被tv2遮挡。如果tv1因突发情况发生紧急制动,tv2会随后跟随紧急制动,sv可能会因tv2的紧急制动反应不及发生追尾。例如,在高速公路上的连环追尾交通事故。如果sv能提前感知到tv1的制动状态等行车信息,就可以提前做出判断,提前采取必要的控制措施,如提前报警、提前减速,提前紧急制动,达到避免与tv2发生碰撞。
49.如图2所示,本车sv配置有感知设备,如视觉摄像头和毫米波雷达,用于识别前方目标(车辆)和位置,以及前方目标的距离,行驶速度(和减速度)。
50.本车sv配置有obu(on board unit,车载单元)设备(v2x车载信息通信设备),用于与前方车辆tv2实现v2v实时通信和信息交互,或与rsu(road side unit,路侧单元)设备实现v2i的实时通信和信息交互。
51.为前方车辆tv1配备obu设备,实现与本车sv的v2v实时通信和信息交互,可以将其行驶速度,制动状态和减速度等信息实时传送到车辆sv。
52.路侧安装有感知设备和实现v2i通信的rsu设备。路侧感知可以实时监测和识别路上的车辆,以及其位置和状态信息(如行驶速度和减速度等)。车辆sv实现与路侧的rsu设备实现v2i的实时信息交互,实时将tv1的信息发送到车辆sv。
53.本发明中,本车sv通过其车载obu设备,通过v2x(v2v或v2i)通信,实现与前方也配置obu设备的车辆tv1或路侧rsu设备对接,协同感知到前方被遮挡车辆(如tv1)的行车状态信息,然后与本车车载感知信息进行融合。一方面,本车通过自身感知系统感知其紧邻前方车辆tv2的行车状态和距离,同时,通过v2x获得的透视感知能力,及时获取车辆tv1的行车行为信息。若被遮挡车辆tv1发生减速或紧急制动的情况,在本车通过车载感知设备感知到紧邻前方车辆tv2减速之前,系统可以提前获得前方被遮挡车辆的减速信息,提前对环境做出感知和判断,提前决策,提前采取必要的措施,如报警、主动减速或紧急制动。最终目的是让本车sv与其紧邻前方车辆tv2保持的安全行驶距离,在紧急情况下避免碰撞。要实现以上
系统技术目标,主要解决以下几个方面的技术内容技术:v2v或v2i的实时通信,基于v2x的感知融合,前车tv2的行为预测和行为判断,sv的控制决策算法。
54.参照图3,描述本实施例中关于前车tv2的行驶行为预测和判断,以及sv的控制决策算法。
55.(1)tv2的行驶行为预测和判断。假设:
56.本车sv、紧邻前方车辆tv2和被遮挡前方车辆tv1的瞬时车速分别为v,v2和v1。在某一初始计算时刻(t=0)的初始车速分别为v0,v02,v01。
57.sv与tv2、tv2与tv1的瞬时车距分别为d
02
,d
12
。在某一初始计算时刻(t=0)的初始车距分别为d0
02
,d0
12
。
58.sv、tv2和tv1的瞬时加速度分别为a,a2和a1(注:减速度为负值)
59.在紧急制动下,前车tv2驾驶员最短反映时间为t
dd2
,制动系统反应滞后时间为t
bd2
。
60.本车sv驾驶员最短反映时间为t
dd
,sv制动系统反应滞后时间为t
bd
。
61.本发明主要关注点是解决在tv2跟随tv1行驶过程中,当tv1发生突然减速的情况下,本车sv感知系统通过v2x技术获得的对tv1的透视感知能力,预测tv2将会随动减速或紧急制动。本车sv需要对tv2的减速行为提前做出判断和行驶轨迹预估,从而提前采取措施,达到尽可能避免与tv2追尾碰撞或减轻碰撞严重程度的目的。如tv1发生缓和减速情况,一般不会触发tv2和sv的紧急制动的需求,所以,这种情况不在本发明的考虑范围之内。
62.其中,前方车辆tv2反应行为预测(反应滞后和减速度预测):
63.tv2跟随tv1行驶,车距距离较近,当tv1发生高强度减速时(减速度|a1|>a1_trig,譬如a1_trig=0.5g或其他适配的数值),tv2会随tv1的减速而采取减速行为,但滞后于tv1。tv2的反应行为,是以避免与其前方车辆tv1碰撞为目的,因此取决于tv2和tv1的相对距离,相对速度和tv1的减速度强度。
64.从当前开始到在某一时刻t,tv1的运动状态:
65.tv1的瞬时速度:v1=v
01
+a1*t
66.tv1的行驶距离:
[0067][0068]
当tv1减速至静止时,所需的时间t1
stop
=-v
01
/a1,从而tv1行驶的距离可以从以上公式中计算得到,定义为d1
stop
。
[0069]
从当前开始到在某一时刻t,tv2的运动状态:
[0070]
tv2的瞬时速度:v2=v
02
+a2*(t-t
dd2-t
bd2
)
[0071]
tv2的行驶距离:
[0072][0073]
tv2减速至静止时,所需的时间t2
stop
=-v
02
/a2+(t
dd2
+t
bd2
),从而tv2行驶的距离可以从以上公式中计算得到,定义为d2
stop
。
[0074]
tv2与tv1的相对距离:
[0075]d12
=d0
12
+d
1-d2[0076]
tv2避免与tv1碰撞的条件是,当tv2制动停止时,d
12
>0
[0077]
即:d0
12
+d1
stop-d2
stop
>0
[0078]
从而,可以从以上的公式中,可以预车辆tv2应该采取的最小预期减速度,定义为,a
2exp
(加速度为负值)。
[0079]
其中,本车sv与紧邻前方车辆tv2相对距离的预测估算:
[0080]
从当前开始到在某一时刻t,tv2的运动状态:
[0081]
当t<(t
dd2
+t
bd2
)时,
[0082]
tv2的瞬时速度:v2=v
02
+a
2_1
*t(注:公式中减速度取负值)
[0083]
tv2的行驶距离:
[0084][0085]
其中,a
2_1
是这段时间中测得的tv2的加速度(减速度为负值)
[0086]
当t>(t
dd2
+t
bd2
)后
[0087]v02_2
=v
02
+a
2_1
*(t
dd2
+t
bd2
)
[0088]
其中,v
02_2
为t=(t
dd2
+t
bd2
)时的速度。
[0089]
v2=v
02_2
+a
2exp
*(t-t
dd2-t
bd2
)
[0090]
tv2的行驶距离:d2=d
2_1
+d
2_2
[0091]
其中,
[0092][0093][0094]
如果预期减速度|a
2exp
|<|a2|(感知到的tv2实际减速度),按实际减速度为准(a
2exp
=a2)。即在计算中a
2exp
=min(a2,a
2exp
)
[0095]d2_2
的计算算至v2=0(停车)为止,即
[0096]
t=t2
stop
=-v
02_2
/a
2exp
+(t
dd2
+t
bd2
)
[0097]
本车sv在驾驶员行驶操作状态下,从当前开始到在某一时刻t,sv的运动状态:
[0098]
sv瞬时速度:v=v0+a*(t-t
dd-t
bd
)(注:公式中减速度取负值)
[0099]
sv行驶距离:
[0100][0101]
sv与tv2的相对距离:
[0102]d02
=d0
02
+d2-d
[0103]
参照图4,描述本实施例的控制决策算法。
[0104]
(a)前方运动车辆减速预警。
[0105]
当本车sv与前车tv2距离小于一定安全距离时,或当被遮挡车辆tv1发生紧急制动,而且tv2与tv1之间的车距小于一设定值时,在需要启动adas紧急制动或自动减速功能前,本车sv系统首先提前对其驾驶员发出预警,驾驶员可以尽早采取必要的操作,避免碰
撞。
[0106]
安全距离设定方法:如前方车辆发生紧急制动至停车,本车可以在温和减速(譬如|a
mild
|<0.2g,此值可根据需要调整优化)的条件下安全停车,无与前方车辆tv2发生碰撞风险。
[0107]
(i)预警距离d0
02-alert
的计算:
[0108]
本车初始车速v0,减速度a(a
sv0
),前方初始车速v02,减速度a2。
[0109]
两车初始距离d0
02
,本车驾驶员反应时延为t
_dd
,制动系统反应时延:t
_bd
[0110]
其中,tv2运动预测:
[0111]
如遇前方车辆tv1或tv2急速制动,前车tv2减速到停止的行驶距离预测:
[0112]
tv2减速到停车的时间:
[0113][0114]
(其中:a
2exp
的计算方法,见“前方车辆tv2反应行为预测”)
[0115]
其中,本车sv运动估算(在温和制动条件下,控制目标):
[0116]
减速到停止的时间:
[0117]
(其中,譬如a
mild
=0.2g或其他适当值)
[0118]
sv减速到静止的行驶距离:
[0119][0120]
其中,本车sv相对于前车tv2的距离估算:
[0121]d02
=d0
02
+d2
stop-d
stop
[0122]
预警的触发原则是,在预警一定时间后,仍可进行温和制动停车,不发生与前车碰撞。
[0123]
不与前车碰撞的条件是:d
02
>0,即d0
02
>d
stop-d2
stop
[0124]
基于以上计算,预警距离设定为:d0
02-alert
=d
stop-d2
stop
+d
pre1
[0125]
这里,d
pre1
为一个提前预警的预设常值(譬如25m,具体取值,可以根据需要调整优化)。
[0126]
(ii)预警触发条件
[0127]
预警触发条件1:
[0128]
当sv与tv2的初始相对距离d0
02
小于d0
02-alert
,sv系统启动对驾驶员预警。
[0129]
附加预警触发条件2:
[0130]
除预警条件1之外,如果tv1出现紧急制动,减速度|a1|>0.5g,tv2与tv1的相对距离d0
12
<d0
12-akert
,sv系统启动对驾驶员预警。(譬如,d0
12-alert
=25m,具体取值,可以根据需要调整优化)
[0131]
(b)温和减速控制
[0132]
在前方运动车辆tv2和tv1减速预警后,在需要启动高强度减速的情况前,可以根
据车距和相对速度启动温和减速,保持车距,提高车辆的行驶舒适性。本功能适用于具有自动驾驶功能(或自动加减速功能)的车辆,需要驾驶员驾驶车辆不设此功能。
[0133]
(i)温和减速控制触发距离计算
[0134]
用前述方法,计算d
stop
和d2
stop
。温和减速控制触发距离。
[0135]
d0
02-mild
=d
stop-d2
stop
[0136]
(ii)温和减速控制
[0137]
当d0
02
<d0
02-mild
,启动温和减速控制,以维持sv-tv2的安全距离。温和减速的减速度,譬如|a
mild
|<0.2g,此值可根据两车相对间距和相对速度实时调节。
[0138]
当d0
02
>d0
02-mild
+d
pre2
时,停止减速,d
pre2
为预设常值。
[0139]
(c)紧急制动控制(aeb)
[0140]
跟车控制目标原则:在tv2显著减速(譬如|a2|>0.5g)的情况下,根据sv与tv2的相对距离和相对速度,以及前方tv2的减速度,判断sv与tv2发生潜在碰撞的可能,以及sv避免碰撞所需要的减速度。如sv需要强制减(譬如加速度|a|>0.5g)才能避免与tv2的碰撞,sv触发紧急制动(|a|>0.5g)达到避免与tv2碰撞或减轻碰撞严重程度的目标。
[0141]
在tv2跟随前方被遮挡车辆tv1,并具有v2x的条件下,在判断sv是否需要启动aeb制动时,此场景可以利用v2v透视感知的能力,提前感知tv1的状态信息,提前预测tv2可能会延后一定时间随tv1进入紧急制动。然后根据预测计算和判断,必要时车辆sv可以提前采取紧急措施,甚至可能先于tv2进入紧急制动状态。
[0142]
触发aeb的判断条件:
[0143]
根据前述“前方车辆tv2反应行为预测”的计算,从当前时刻开始到某一时刻t,sv与tv2的间距预测为:d
02
=d0
02
+d
2-d。
[0144]
当d
02
=0,为本车辆sv与前方车辆tv2碰撞发生点。sv与tv2不发生追尾的条件是,当sv减速到停止时,d
02
>0。
[0145]
车辆sv制动到停止的时间:
[0146]
即当t=t
stop
时,d
02
>0是避免碰撞的条件。
[0147]
也即:d<d0
02
+d2[0148][0149]
从上面的两个公式,可以计算得到本车sv减速度a绝对值的最小值|a
min
|。如果|a
min
|>a_aeb(譬如,0.5g或其他设定值),即触发aeb功能。
[0150]
本实施例中,通过v2x(v2i,v2v)技术,实现车载感知和路侧感知信息的融合,获得更精确更可靠,全天候的环境感知信息,解决在关键危险场景的感知障碍。基于v2x的感知融合技术服务用于adas系统,形成adas+系统,从而获得增强功能和性能的adas功能算法技术。本发明的控制决策功能算法技术,一方面综合考虑舒适、安全和避撞要求,同时适用于adas和自动驾驶系统的应用。车辆决策控制算法策略,可通过车辆运动轨迹进行实时动态计算和优化。在启动紧急制动之前,在必要的情况下,可以应用制动预控制策略,提高系统反应速度,降低制动时延,提高避撞性能。
[0151]
此外,本发明还提供一种基于v2x透视感知技术的高级驾驶辅助系统,可执行上述实施例所述的决策控制方法。
[0152]
本发明还提供一种智能网联汽车,包括上述实施例的基于v2x透视感知技术的高级驾驶辅助系统;
[0153]
车载感知单元和路侧感知单元,经v2x关联及融合感知,为所述高级驾驶辅助系统提供遮挡区域的目标物信息。
[0154]
本领域技术人员应理解,上面对本发明的实施例的描述的目的仅为了示例性地说明本发明的实施例的有益效果,并不意在将本发明的实施例限制于所给出的任何示例。
[0155]
以上已经描述了本发明的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1