基于卡尔曼滤波轨迹融合方法、设备、装置及存储介质与流程
本申请涉及数据处理,尤其涉及基于卡尔曼滤波轨迹融合方法、设备、装置及存储介质。
背景技术:
1、随着车辆智能化和精准化技术发展,不仅能够有效提升用户的乘驾体验,还能够有效降低司机的驾驶难度。然而,在实际进行车辆运动状态相关信息输出或者轨迹信息输出的时候,由于存在全球定位系统(global positioning system,gps)信号消失或者传感器本身精度不高等问题,会采用预测的方式输出对应的轨迹,然而预测得到的轨迹结果不是很准确。因此,一种新的解决方案亟待提出。
技术实现思路
1、本申请实施例提供一种基于卡尔曼滤波轨迹融合方法、设备、装置及存储介质,用以准确判断车身与障碍物的距离,降低事故几率。
2、本申请实施例提供一种车辆运动预测方法,包括:
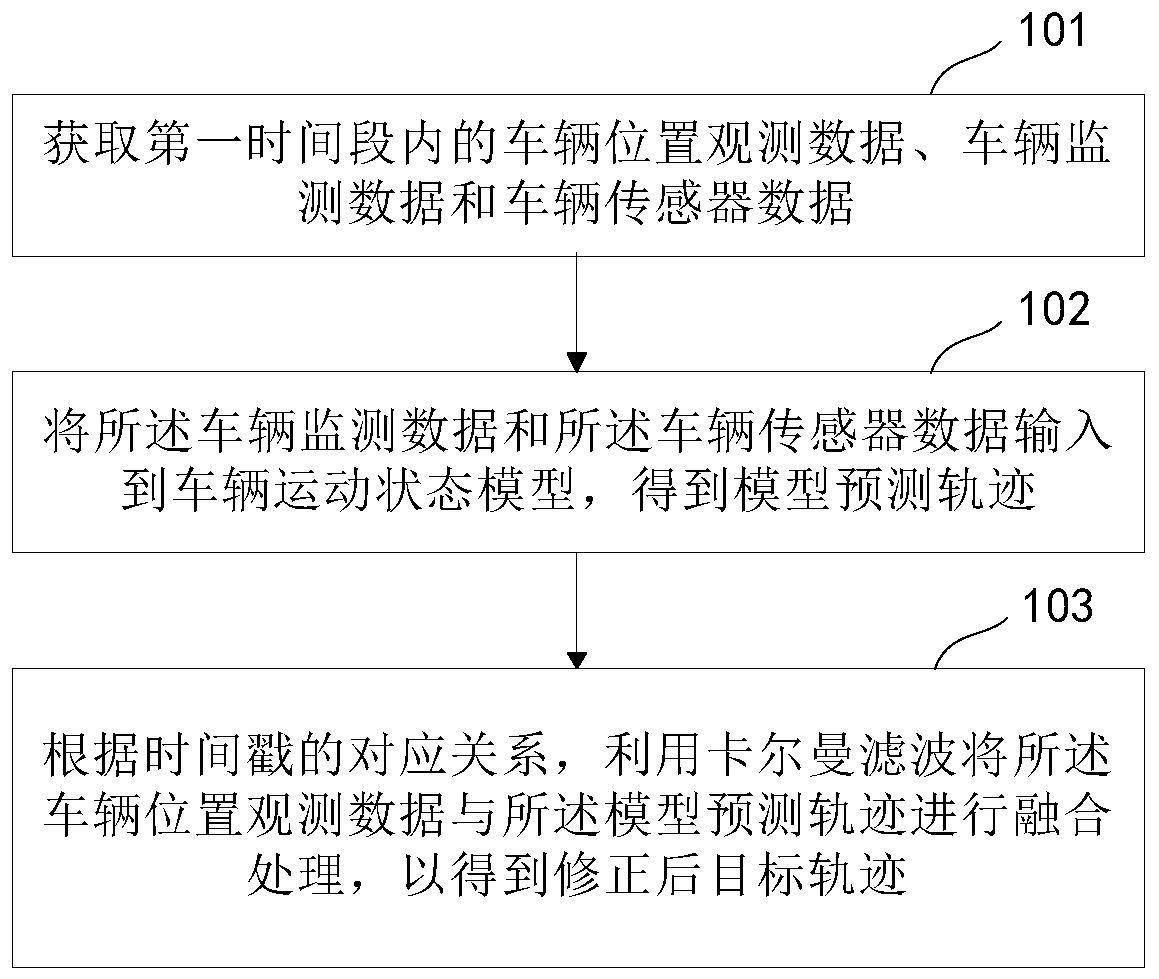
3、获取第一时间段内的车辆位置观测数据、车辆监测数据和车辆传感器数据;
4、将所述车辆监测数据和所述车辆传感器数据输入到车辆运动状态模型,得到模型预测轨迹;
5、根据时间戳的对应关系,利用卡尔曼滤波将所述车辆位置观测数据与所述模型预测轨迹进行融合处理,以得到修正后目标轨迹。
6、可选地,所述根据时间戳的对应关系,利用卡尔曼滤波将所述车辆位置观测数据与所述模型预测轨迹进行融合处理,以得到修正后目标轨迹,包括:根据所述模型预测轨迹的第一时间戳的采样频率,确定对应的所述车辆位置观测数据的第一时间戳;
7、根据卡尔曼滤波融合算法,将具有相同第一时间戳的所述车辆位置观测数据与所述模型预测轨迹进行融合处理;
8、输出所述模型预测轨迹对应的所述修正后目标轨迹。
9、可选地,所述根据卡尔曼滤波融合算法,将所述车辆位置观测数据与所述模型预测轨迹进行融合处理,包括:根据车辆位置观测数据,确定对应的地图道路数据;
10、基于所述第一时间戳,确定所述地图道路数据与所述模型预测轨迹融合得到的偏差信息;所述偏差信息包括:偏移方向,相对距离,起始偏移点中至少一个;
11、根据所述偏差信息,对所述模型观测轨迹进行修正。
12、可选地,输出所述模型预测轨迹对应的所述修正后目标轨迹之后,还包括:确定所述地图道路数据与所述模型预测轨迹之间的累积偏差信息;根据所述累积偏差信息对所述车辆运动状态模型中的参数进行优化。
13、可选地,所述根据所述累积偏差信息对所述车辆运动状态模型中的参数进行优化,包括:利用所述累积偏差信息对误差分析模型进行训练;将所述误差分析模型输出的误差偏移量输入所述车辆运动状态模型,作为车辆运动状态模型的优化参数。
14、可选地,所述通过输入到车辆运动状态模型中的所述车辆监测数据和车辆传感器数据,计算得到模型预测轨迹,包括:根据所述车辆位置观测数据、所述车辆监测数据以及车辆传感器数据进行滤波降噪处理结果,确定车辆状态决策规则;根据所述车辆状态决策规则和所述车辆监测数据和车辆传感器数据,计算得到模型预测轨迹。
15、可选地,所述根据所述车辆位置观测数据、车辆监测数据以及车辆传感器数据进行滤波降噪处理结果,确定车辆状态决策规则,包括:获取所述车辆位置观测数据中的位置变化量、车辆监测数据中车辆四轮轮速和车辆档位、车辆传感器数据中的行驶速度和加速度;若所述位置变量与所述车辆四轮轮速、所述行驶速度、所述加速度、所述车辆档位匹配,则确定车辆状态决策规则为正常行驶状态;若所述位置变量与所述行驶速度、所述加速度匹配,且与所述车辆四轮轮速不匹配,则确定车辆状态决策规则为脱困状态;若所述位置变量与所述车辆四轮轮速、所述行驶速度、所述加速度匹配、且与所述车辆档位不匹配,则确定车辆状态决策规则为溜车状态。
16、本申请实施例提供一种车辆设备,包括:车身,所述车身上安装有雷达和图像采集设备,还设置有存储器、处理器、通信组件和显示组件;所述存储器,用于存储一条或多条计算机指令;所述处理器用于执行所述一条或多条计算机指令以用于:通过所述通信组件以及所述显示组件执行基于卡尔曼滤波轨迹融合方法中的步骤。
17、本申请实施例提供一种基于卡尔曼滤波轨迹融合装置,应用于车辆设备上,所述装置包括:
18、获取模块,用于获取第一时间段内的车辆位置观测数据、车辆监测数据和车辆传感器数据;
19、预测模块,用于将所述车辆监测数据和所述车辆传感器数据输入到车辆运动状态模型,得到模型预测轨迹;
20、融合模块,用于根据时间戳的对应关系,利用卡尔曼滤波将所述车辆位置观测数据与所述模型预测轨迹进行融合处理,以得到修正后目标轨迹。
21、本申请实施例提供一种存储有计算机程序的计算机可读存储介质,计算机程序被执行时能够实现基于卡尔曼滤波轨迹融合方法中的步骤。
22、本申请实施例提供的车辆运动预测方法、设备、装置及存储介质中,获取第一时间段内的车辆位置观测数据、车辆监测数据和车辆传感器数据;将所述车辆监测数据和所述车辆传感器数据输入到车辆运动状态模型,得到模型预测轨迹;根据时间戳的对应关系,利用卡尔曼滤波将所述车辆位置观测数据与所述模型预测轨迹进行融合处理,以得到修正后目标轨迹。根据卡尔曼滤波算法进行数据融合,利用融合后的结果可有助于提高车辆运动状态精度,降低传感器或系统误差带来的偏航影响,提供更加准确的车辆运动状态信息,同时也可以根据车辆位置观测数据、车辆运动状态模型对后续车辆运动状态做出预测。
技术特征:
1.一种基于卡尔曼滤波轨迹融合方法,应用于车辆设备,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据时间戳的对应关系,利用卡尔曼滤波将所述车辆位置观测数据与所述模型预测轨迹进行融合处理,以得到修正后目标轨迹,包括:
3.根据权利要求2所述的方法,其特征在于,所述根据卡尔曼滤波融合算法,将具有相同第一时间戳的所述车辆位置观测数据与所述模型预测轨迹进行融合处理,包括:
4.根据权利要求3所述的方法,其特征在于,输出所述模型预测轨迹对应的所述修正后目标轨迹之后,还包括:
5.根据权利要求4所述的方法,其特征在于,所述根据所述累积偏差信息对所述车辆运动状态模型中的参数进行优化,包括:
6.根据权利要求1所述的方法,其特征在于,所述将所述车辆监测数据和所述车辆传感器数据输入到车辆运动状态模型,得到模型预测轨迹,包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述车辆位置观测数据、车辆监测数据以及车辆传感器数据进行滤波降噪处理结果,确定车辆状态决策规则,包括:
8.一种车辆设备,其特征在于,包括:车身,所述车身上安装有雷达和图像采集设备,还设置有存储器、处理器、通信组件和显示组件;
9.一种基于卡尔曼滤波轨迹融合装置,应用于车辆设备上,其特征在于,所述装置包括:
10.一种存储有计算机程序的计算机可读存储介质,其特征在于,计算机程序被执行时能够实现如权利要求1-7中任一项所述的方法中的步骤。
技术总结
本申请实施例提供基于卡尔曼滤波轨迹融合方法、设备、装置及存储介质。在车辆运动预测方法中,获取第一时间段内的车辆位置观测数据、车辆监测数据和车辆传感器数据;将所述车辆监测数据和所述车辆传感器数据输入到车辆运动状态模型,得到模型预测轨迹;根据时间戳的对应关系,利用卡尔曼滤波将所述车辆位置观测数据与所述模型预测轨迹进行融合处理,以得到修正后目标轨迹。根据卡尔曼滤波算法进行数据融合,利用融合后的结果可有助于提高车辆运动状态精度,降低传感器或系统误差带来的偏航影响,提供更加准确的车辆运动状态信息,同时也可以根据车辆位置观测数据、车辆运动状态模型对后续车辆运动状态做出预测。
技术研发人员:祝勇,蒙越,方绍伟,纪铮
受保护的技术使用者:北京罗克维尔斯科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!