车辆控制装置的制作方法
1.本发明涉及一种车辆控制装置。
背景技术:
2.在专利文献1中公开了如下技术:在能够利用内燃机或与内燃机连结的马达中的至少一方的动力来行驶的混合动力车辆中,通过从马达产生与内燃机的爆发行程中产生的扭矩相反相位的矩形波状减振扭矩,来抑制内燃机的扭矩振动。另外,在专利文献2中公开了如下技术:在发动机转速比规定的减振实施上限发动机转速小、且进气管负压比规定的减振实施下限进气管负压靠高负荷侧(负压的绝对值大)的减振实施区域中,利用马达进行发动机振动的减振。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2005-065408号公报
6.专利文献2:日本特开2007-296975号公报
技术实现要素:
7.发明要解决的课题
8.在从内燃机到驱动轮的动力传递路径上具备锁止离合器的车辆中,通过使锁止离合器成为联接状态,能够将内燃机的动力高效地传递到驱动轮从而行驶。因此,通过增加使锁止离合器成为联接状态的机会,能够提高车辆的燃料消耗性能。但是,另一方面,若在内燃机的扭矩振动大时,例如所谓的气缸停歇发动机的停缸运转时,使锁止离合器为联接状态,则该扭矩振动经由锁止离合器向驱动轮传递,车辆的噪音和振动(nv:noise,vibration)特性有时会恶化。从车辆的商品性的观点出发,期望在避免nv特性的恶化的同时,提高燃料消耗性能。
9.本发明提供一种车辆控制装置,该车辆控制装置能够在避免车辆的nv特性的恶化的同时,提高燃料消耗性能。
10.用于解决课题的手段
11.本发明提供一种车辆控制装置,其对车辆进行控制,所述车辆具备内燃机、电动机、驱动轮、以及设置于从所述内燃机以及所述电动机到所述驱动轮的动力传递路径上的锁止离合器,其中,
12.所述内燃机构成为能够切换使全部的气缸运转的全缸运转和使一部分的气缸在停歇的状态下运转的停缸运转,
13.所述锁止离合器能够采用联接状态和滑动状态,在所述联接状态中,将来自所述内燃机和所述电动机中的至少一方的输出高效地传递到所述驱动轮,在所述滑动状态中,将所述输出以比所述联接状态低的效率传递到所述驱动轮,
14.由所述内燃机以及所述电动机构成的动力设备输出的动力设备扭矩在曲轴的轴
端的扭矩称为曲轴端扭矩,所述车辆控制装置能够基于针对所述曲轴端扭矩的目标扭矩,来在所述全缸运转与所述停缸运转之间切换所述内燃机的运转状态,以及
15.在使所述内燃机进行着停缸运转的情况下,所述车辆控制装置能够执行减振控制,所述减振控制降低向所述驱动轮传递的所述内燃机的扭矩振动,
16.所述减振控制包括马达减振控制和滑动减振控制,所述马达减振控制从所述电动机输出减振扭矩,所述减振扭矩包含与从所述内燃机输出的发动机扭矩相反相位的扭矩,所述滑动减振控制使所述锁止离合器成为所述滑动状态,
17.在所述目标扭矩较小的低负荷状态、或者所述内燃机的转速较高的高转速状态的非减振区域中,所述车辆控制装置不执行所述马达减振控制以及所述滑动减振控制,
18.在所述目标扭矩较大的高负荷状态、或者所述内燃机的转速较低的低转速状态的第一减振区域中,所述车辆控制装置执行所述马达减振控制及所述滑动减振控制,以及
19.在所述目标扭矩处于所述低负荷状态与所述高负荷状态之间的中负荷状态、或者所述内燃机的转速处于所述低转速状态与所述高转速状态之间的中转速状态的第二减振区域中,所述车辆控制装置执行所述马达减振控制而不执行所述滑动减振控制。
20.发明效果
21.根据本发明,能够提供一种车辆控制装置,该车辆控制装置能够在避免车辆的nv特性的恶化的同时,提高燃料消耗性能。
附图说明
22.图1是表示本实施方式的车辆的一例的图。
23.图2是表示本实施方式的车辆所具备的变速器的一例的图。
24.图3是表示本实施方式的车辆中的有效燃料消耗率(bsfc)的一例的图。
25.图4是表示马达减振控制的一例的图。
26.图5是表示滑动减振控制的一例的图。
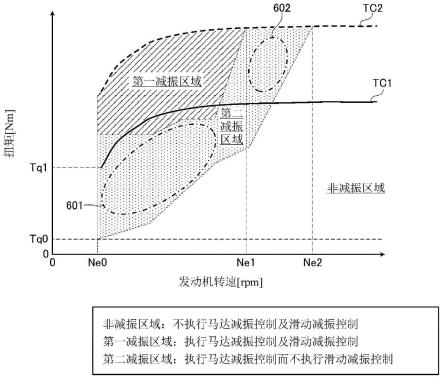
27.图6是表示非减振区域、第一减振区域以及第二减振区域的一例的图。
28.附图标记说明
29.1 车辆
30.11 发动机(内燃机)
31.12 电动发电机(电动机)
32.134 锁止离合器
33.30 控制装置(车辆控制装置)
34.601、602 区域
35.dw 驱动轮
36.tc1 扭矩特性(第一扭矩)
37.tc2 扭矩特性(第二扭矩)。
具体实施方式
38.以下,参照附图对本发明的车辆控制装置的一个实施方式进行详细说明。
39.[车辆]
[0040]
如图1所示,本实施方式中的车辆1是所谓的混合动力电动机动车(hybrid electrical vehicle),具备作为内燃机的一例的发动机11、作为电动机的一例的电动发电机12、作为动力传递装置的一例的变速器tm、驱动轮dw、蓄电池20、电力转换装置21、以及控制车辆1整体的控制装置30。控制装置30是本发明的车辆控制装置的一例。另外,在图1中,粗实线表示机械地连结,双重虚线表示电气配线,实线箭头表示控制信号。
[0041]
发动机11例如是构成为能够切换能够使全部的气缸运转的全缸运转和能够在使一部分的气缸停歇的状态下运转的停缸运转的所谓气缸停歇发动机。作为一例,发动机11是具备可变气门正时机构(未图示)的v型6缸发动机,构成为能够通过可变气门正时机构使一列的气缸组中的3个气缸停歇。即,在发动机11中,在全缸运转时,使用两列的气缸组中的6个气缸,进行6缸运转,在停缸运转时,仅使用一列的气缸组中的3个气缸,进行3缸运转。另外,发动机11构成为,也能够通过可变气门正时机构来改变例如各进气门的开阀期间、开闭正时、升程量等。
[0042]
发动机11通过旋转驱动曲轴11a(参照图2)来输出机械能(动力),该机械能是通过使所供给的燃料(例如汽油)燃烧而产生的。具体而言,发动机11具备喷射器(未图示)。例如使用脉冲宽度调制(pwm:pulse width modulation)控制,由控制装置30控制喷射器向发动机11供给燃料。通过供给燃料,从发动机11输出的动力经由与发动机11机械地连结的变速器tm传递至驱动轮dw,以供车辆1行驶。
[0043]
另外,发动机11也与电动发电机12机械地连结。电动发电机12例如是三相的交流马达,作为通过被供给电力而输出动力的电动机发挥功能。具体而言,电动发电机12的转子(未图示)与发动机11的曲轴11a连结。因此,从由发动机11及电动发电机12构成的动力设备输出的动力设备扭矩在曲轴11a的轴端的扭矩即曲轴端扭矩成为从发动机11输出的扭矩(以下,也称为发动机扭矩)与从电动发电机12输出的扭矩(以下,也称为马达扭矩)之和。
[0044]
通过将发动机11与电动发电机12机械地连结,从而在车辆1中能够进行马达辅助,即通过电动发电机12的输出来辅助使用发动机11的输出的驱动轮dw的驱动(即车辆1的行驶)。
[0045]
另外,通过将发动机11与电动发电机12机械地连结,也能够通过发动机11的输出来驱动电动发电机12旋转,或者通过电动发电机12的输出来驱动发动机11旋转。例如,在车辆1中,能够通过电动发电机12的曲轴转动来使发动机11起动。
[0046]
电动发电机12经由电力转换装置21与蓄电池20电连接。蓄电池20例如是具有串联连接的多个蓄电单元且构成为能够输出规定的电压(例如50~200[v])的蓄电池。作为蓄电池20的蓄电单元,能够使用锂离子电池、镍氢电池等。
[0047]
电力转换装置21具备逆变器、dc/dc转换器(均未图示)等,并且由控制装置30控制,是进行电力的转换的装置。例如,电力转换装置21将从蓄电池20供给的直流电力转换为三相的交流电力从而向电动发电机12供电,或者将从电动发电机12供给的三相的交流电力转换为直流电力从而向蓄电池20供电。电动发电机12经由电力转换装置21而被供给蓄电池20的电力,由此能够进行上述的马达辅助。
[0048]
另外,电动发电机12也作为通过被旋转驱动而进行发电的发电机发挥功能。电动发电机12除了能够如上所述通过发动机11的输出而被驱动旋转之外,还能够通过伴随着车辆1的制动等而从驱动轮dw侧输入的动力,来被驱动旋转。由电动发电机12发出的电力经由
电力转换装置21向蓄电池20供电,用于蓄电池20的充电。
[0049]
变速器tm例如是具有多个变速档(例如7档)的多档式变速器,设置于从发动机11和电动发电机12到驱动轮dw的动力传递路径上。具体而言,如图2所示,变速器tm构成为包括变矩器13和齿轮箱14。
[0050]
变矩器13具备泵轮131、涡轮132、定子133以及锁止离合器134。泵轮131与发动机11以及电动发电机12(具体而言为曲轴11a)机械地连结,并伴随它们的旋转驱动而一体旋转。涡轮132具有靠近泵轮131的工作油排出口配置的工作油流入口,并且与齿轮箱14的输入轴141机械地连结,与输入轴141一体旋转。定子133以夹在涡轮132与泵轮131之间的方式配置,使从涡轮132返回泵轮131的工作油的流动方向偏转。另外,定子133经由单向离合器135支撑于变矩器13的壳体(未图示)等。变矩器13通过使工作油在形成于泵轮131与涡轮132之间的循环路中循环,能够经由工作油从泵轮131向涡轮132传递动力(旋转动力)。
[0051]
锁止离合器134是能够断开或连接发动机11(具体而言为曲轴11a)与齿轮箱14的输入轴141的机械连接的离合器。通过使锁止离合器134成为联接状态,能够将发动机11的输出直接传递至齿轮箱14的输入轴141。即,在锁止离合器134为联接状态时,发动机11的曲轴11a与齿轮箱14的输入轴141一体旋转。
[0052]
另外,锁止离合器134也能够通过滑动(slip)而使来自曲轴11a的动力(旋转动力)衰减并传递至输入轴141。换言之,锁止离合器134能够取得联接状态和滑动状态,在联接状态中,将来自发动机11和电动发电机12中的至少一方的输出高效地传递至驱动轮dw,在滑动状态中,以比联接状态低的效率传递至驱动轮dw。
[0053]
齿轮箱14具备:输入轴141,其经由变矩器13和锁止离合器134中的至少一方而被传递发动机11和电动发电机12的输出;多个变速机构142、143,其能够对传递至输入轴141的动力进行变速;以及输出部件144,其包括将由这些多个变速机构中的任一个变速机构变速后的动力向驱动轮dw侧输出的输出齿轮144a。此外,输入轴141是主轴的一例。
[0054]
齿轮箱14所具备的多个变速机构包括第一变速机构142和第二变速机构143。第一变速机构142具备第一变速离合器142a、通过第一变速离合器142a成为联接状态而与输入轴141一体旋转的第一驱动齿轮142b、以及与输出部件144一体旋转的第一从动齿轮142c。第二变速机构143具备第二变速离合器143a、通过第二变速离合器143a成为联接状态而与输入轴141一体旋转的第二驱动齿轮143b、以及与输出部件144一体旋转的第二从动齿轮143c。
[0055]
另外,在图2中,作为齿轮箱14所具备的变速机构,仅图示了第一变速机构142以及第二变速机构143,但齿轮箱14还具备例如第一变速机构142以及第二变速机构143以外的变速机构(未图示)。
[0056]
由控制装置30控制由锁止离合器134、第一变速离合器142a以及第二变速离合器143a这样的变速器tm所具备的各离合器(以下,也简称为变速器tm的离合器)是处于联接状态(也包括前述的滑动状态)还是分离状态。
[0057]
返回图1,控制装置30是控制发动机11、变速器tm以及电力转换装置21等的装置。而且,控制装置30也能够经由电力转换装置21的控制来控制电动发电机12。另外,控制装置30可以直接控制电动发电机12,也可以控制蓄电池20的输入输出。控制装置30例如能够通过具备进行各种运算的处理器、存储各种信息的存储装置、控制控制装置30的内部与外部
之间数据的输入输出的输入输出装置等的电子控制单元(ecu:electronic control unit)来实现。此外,控制装置30既可以通过1个ecu来实现,也可以通过多个ecu协调动作来实现。
[0058]
在控制装置30上连接有各种传感器,控制装置30基于从这些各种传感器输入的信息来控制发动机11、变速器tm以及电力转换装置21(即电动发电机12)等。作为与控制装置30连接的传感器,例如能够举出检测发动机11(曲轴11a)的转速(以下也称为发动机转速,也参照图2中的ne)的发动机转速传感器17、检测车辆1的行驶速度(以下也称为车速)的车速传感器18、检测输入轴141的转速(以下也称为主轴转速,也参照图2中的nm)的主轴转速传感器19(参照图2)。
[0059]
并且,作为与控制装置30连接的其它传感器,能够举出检测车辆1的加速踏板上的操作量(以下,称为ap开度)的ap传感器、检测车辆1的制动踏板上的操作量的制动传感器、检测变速器tm的变速档的齿轮位置传感器、检测蓄电池20的输出或温度的蓄电池传感器、检测发动机11的进气压(进气管压力)的进气压传感器(均未图示)等。另外,也可以在控制装置30上连接有检测大气压的大气压传感器(未图示)。
[0060]
例如,控制装置30基于车辆1的行驶状态,导出相对于发动机扭矩与马达扭矩之和即曲轴端扭矩的目标扭矩(以下,也称为曲轴端要求扭矩)。作为一例,控制装置30通过参照由车速传感器18检测出的车速和由ap传感器检测出的ap开度、以及根据车速和ap开度来确定车辆1的行驶所要求的曲轴端要求扭矩的映射,来导出曲轴端要求扭矩。另外,该映射预先存储于例如控制装置30的存储装置。而且,控制装置30控制发动机扭矩和马达扭矩,以使曲轴端扭矩成为曲轴端要求扭矩。
[0061]
另外,控制装置30基于曲轴端要求扭矩,在全缸运转与停缸运转之间切换发动机11的运转状态。具体而言,在曲轴端要求扭矩比较小时,控制装置30使发动机11进行停缸运转,在曲轴端要求扭矩大到一定程度时,使发动机11进行全缸运转。即,在曲轴端要求扭矩小时,控制装置30通过使发动机11进行停缸运转来实现车辆1的燃料消耗性能的提高,在曲轴端要求扭矩变大时,通过使发动机11进行全缸运转来实现确保与车辆1的行驶状态相应的适当的曲轴端扭矩。另外,关于由控制装置30进行的发动机11的运转状态的切换的具体例在后面进行叙述,因此省略此处的说明。
[0062]
[有效燃料消耗率(bsfc)]
[0063]
另外,控制装置30还考虑有效燃料消耗率(以下称为“bsfc(brake specific fuel consumption)”)来控制发动机11。bsfc是将在发动机的1个循环中消耗的燃料(燃料喷射量)除以发动机的输出(有效马力)而得到的值,其值越小,表示燃料消耗效率越好。
[0064]
控制装置30基于bsfc控制发动机扭矩。具体而言,控制装置30参照预先存储于控制装置30的存储装置等中的表示车辆1的bsfc特性的bsfc特性模型,控制发动机扭矩,从而使bsfc成为最佳值。
[0065]
[本实施方式的车辆的bsfc特性]
[0066]
在此,参照图3对车辆1的bsfc特性进行说明。另外,在图3中,纵轴表示bsfc[g/kwh],横轴表示发动机扭矩[nm]。
[0067]
如图3所示,使发动机11进行停缸运转的情况下的车辆1的bsfc即停缸bsfc,在发动机扭矩达到停缸底部扭矩之前随着发动机扭矩的增加而逐渐降低,在达到停缸底部扭矩之后随着发动机扭矩的增加而上升。即,在使发动机11进行停缸运转的情况下,若发动机扭
矩成为停缸底部扭矩,则bsfc的值最小,燃料消耗效率最高。换言之,停缸底部扭矩是进行停缸运转的发动机11的燃料消耗率最佳动作点。
[0068]
另外,虽然在图3中仅图示了一部分,但作为使发动机11进行全缸运转的情况下的车辆1的bsfc,即,全缸bsfc也具有与停缸bsfc相同的倾向。具体而言,全缸bsfc在发动机扭矩达到全缸底部扭矩(未图示,但全缸底部扭矩>停缸底部扭矩)之前随着发动机扭矩的增加而逐渐降低,在达到全缸底部扭矩之后随着发动机扭矩的增加而上升。即,在使发动机11进行全缸运转的情况下,若发动机扭矩成为全缸底部扭矩,则bsfc的值最小,燃料消耗效率最高。
[0069]
[停缸底部辅助控制]
[0070]
在发动机11的停缸运转时,如果增加使发动机11运转的机会以使发动机扭矩成为停缸底部扭矩(即在燃料消耗率最佳动作点),则车辆1的燃料消耗性能提高。另一方面,若通过使发动机11以停缸底部扭矩运转而无法确保与车辆1的行驶状态相应的适当的曲轴端扭矩,则会产生暂时停机(所谓的车辆1的行驶迟滞),驾驶性能可能降低。
[0071]
因此,在使发动机11进行着停缸运转的情况下,若发动机扭矩达到停缸底部扭矩,则控制装置30执行停缸底部辅助控制。在停缸底部辅助控制中,控制装置30在将发动机扭矩维持为停缸底部扭矩的同时,随着曲轴端要求扭矩的增加,相应地增加用于马达辅助的马达扭矩。换言之,在停缸底部辅助控制中,控制装置30利用马达扭矩填补由于将发动机扭矩维持为停缸底部扭矩而相对于曲轴端要求扭矩不足的量的扭矩。由此,能够使发动机11在燃料消耗率最佳动作点运转,并且确保与车辆1的行驶状态相应的适当的曲轴端扭矩。因此,能够避免发生暂时停机而使驾驶性能降低,并且能够实现车辆1的燃料消耗性能的提高。
[0072]
而且,在执行着停缸底部辅助控制的情况下,若曲轴端要求扭矩达到规定的全缸切换底部扭矩,则控制装置30结束停缸底部辅助控制,将发动机11的运转状态切换为全缸运转。在此,如图3所示,全缸切换底部扭矩是表示停缸bsfc的曲线与表示全缸bsfc的曲线之间的交点所对应的扭矩。由此,从bsfc的观点出发,能够在适当的时机将发动机11的运转状态从停缸运转切换为全缸运转。
[0073]
[发动机的扭矩振动]
[0074]
接着,参照图4,对发动机11的扭矩振动进行说明。此外,在图4中,纵轴表示扭矩[nm],横轴表示时刻。
[0075]
如图4中的粗实线所示,在发动机11的停缸运转时,与全缸运转时相比,在发动机11的燃烧行程(爆发行程)中产生的扭矩振动的振幅(以下,也简称为发动机11的扭矩振动)有变大的倾向。在停缸运转时发动机11的扭矩振动变大是因为,为了确保适当的曲轴端扭矩,从运转的每1个气缸输出的扭矩与全缸运转时相比增大了。而且,在停缸运转时,与全缸运转时相比,发动机11的爆发间隔变长,因此发动机11的扭矩振动的频率也容易变低。
[0076]
以这种方式,在停缸运转时,有时在发动机11中产生振幅大且频率低的扭矩振动,若这样的扭矩振动传递至驱动轮dw,则成为给驾驶员带来不适感的振动的主要原因,车辆1的nv特性有可能恶化。
[0077]
因此,控制装置30构成为,在使发动机11进行着停缸运转的情况下,能够执行减振控制,该减振控制降低向驱动轮dw传递的发动机11的扭矩振动。在此,减振控制包括:从电
动发电机12输出规定的减振扭矩的马达减振控制;以及使锁止离合器134成为滑动状态的滑动减振控制。以下,对马达减振控制以及滑动减振控制的一例进行说明。
[0078]
[马达减振控制]
[0079]
在马达减振控制中,如图4中的单点划线所示,控制装置30使电动发电机12输出减振扭矩,该减振扭矩包含与从发动机11输出的发动机扭矩相反相位的扭矩。具体而言,如图4中的虚线所示,控制装置30使电动发电机12输出如下的减振扭矩,该减振扭矩将从发动机11的各气缸和电动发电机12各自在各时刻输出的扭矩合成而得到的瞬时合成扭矩与全缸运转时大致相同。由此,若电动发电机12的减振扭矩相对于发动机11的扭矩振动并无不足,则即使在停缸运转时也能够实现与全缸运转时大致相同的nv特性。
[0080]
[滑动减振控制]
[0081]
接着,参照图5对滑动减振控制进行说明。另外,图5中示出了发动机转速及主轴转速与发动机扭矩的时间关系。
[0082]
如图5所示,控制装置30通过在使发动机11停缸运转着的情况下执行滑动减振控制,能够使锁止离合器134成为滑动状态(图示为“lc滑动”),使经由锁止离合器134从曲轴11a向输入轴141传递的动力衰减。
[0083]
具体而言,控制装置30在执行滑动减振控制时,一边参照由发动机转速传感器17检测出的发动机转速和由主轴转速传感器19检测出的主轴转速,一边适当地控制向锁止离合器134供给的液压,由此控制经由锁止离合器134的动力的传递效率(以下,也简称为动力传递效率)。通过执行滑动减振控制,例如,如图5所示,即使发动机转速变动,控制装置30也能够将主轴转速保持为恒定。
[0084]
然而,当由于执行滑动减振控制而动力传递效率降低时,为了与不执行滑动减振控制时同样地使车辆1行驶,需要从发动机11、电动发电机12输出更多的动力。因此,滑动减振控制可能导致车辆1的燃料消耗性能降低。
[0085]
因此,为了抑制由滑动减振控制引起的燃料消耗性能的降低,控制装置30在执行减振控制的情况下,比滑动减振控制优先地执行马达减振控制,在仅通过马达减振控制无法完全避免nv特性的恶化的情况下,执行滑动减振控制。另外,控制装置30在执行滑动减振控制的情况下,也与马达减振控制一起执行,从而尽可能地减小为了避免nv特性的恶化而需要的动力传递效率的降低量。
[0086]
具体而言,控制装置30存储有根据曲轴端要求扭矩和发动机转速分别预先决定不执行马达减振控制以及滑动减振控制的非减振区域、执行马达减振控制以及滑动减振控制的第一减振区域、以及执行马达减振控制而不执行滑动减振控制的第二减振区域的映射。控制装置30参照该映射,基于停缸运转时的曲轴端要求扭矩和发动机转速,判断是否仅执行马达减振控制(即是否为第二减振区域所包含的曲轴端要求扭矩及发动机转速)、是否除了执行马达减振控制之外还执行滑动减振控制(即是否为第一减振区域所包含的曲轴端要求扭矩及发动机转速)。而且,控制装置30基于该判断结果,根据需要执行马达减振控制,或者执行马达减振控制以及滑动减振控制。
[0087]
[非减振区域、第一减振区域以及第二减振区域的一例]
[0088]
以下,参照图6,对非减振区域、第一减振区域以及第二减振区域的一例进行说明。此外,在图6中,纵轴表示扭矩[nm],横轴表示发动机转速[rpm]。
[0089]
在图6中,扭矩特性tc1是本发明中的第一扭矩的一例,表示在停缸运转时bsfc的值最小的停缸底部扭矩。在使发动机11进行着停缸运转的情况下,若曲轴端要求扭矩小于或等于扭矩特性tc1所表示的扭矩,则控制装置30控制发动机11以便仅通过发动机扭矩来确保曲轴端要求扭矩。此外,如扭矩特性tc1所示,停缸底部扭矩根据发动机转速而变化。
[0090]
另外,在图6中,扭矩特性tc2是本发明中的第二扭矩的一例,表示扭矩特性tc1与马达上限扭矩之和。在此,马达上限扭矩是电动发电机12能够输出的上限扭矩,是根据电动发电机12的性能等预先确定的扭矩。在使发动机11进行着停缸运转的情况下,若曲轴端要求扭矩大于扭矩特性tc1所表示的扭矩且小于或等于扭矩特性tc2所表示的扭矩,则控制装置30执行停缸底部辅助控制,并控制发动机11及电动发电机12以通过发动机扭矩及马达扭矩之和来确保曲轴端要求扭矩。
[0091]
[非减振区域]
[0092]
如图6所示,非减振区域被设定为包含如下区域,该区域中,扭矩小于tq0[nm]。即,在停缸运转时,处于曲轴端要求扭矩小于tq0[nm]的低负荷状态的情况下,控制装置30不执行马达减振控制及滑动减振控制。另外,在此,tq0[nm]是比停缸底部扭矩的最小值即tq1[nm]小的扭矩,能够通过实验求出。
[0093]
以这种方式,在曲轴端要求扭矩较小的低负荷状态的情况下,以从发动机11输出的发动机扭矩也变小的方式进行控制,因此发动机11的扭矩振动也变小。因此,在这样的情况下,控制装置30通过不执行马达减振控制以及滑动减振控制,能够避免nv特性的恶化,并且能够抑制由执行马达减振控制引起的消耗电力的增加、以及由执行滑动减振控制引起的燃料消耗性能的降低。
[0094]
另外,如图6所示,非减振区域被设定为包含如下区域,该区域中,发动机转速大于或等于ne2[rpm]。即,在停缸运转时,处于发动机转速大于或等于ne2[rpm]的高转速状态的情况下,控制装置30不执行马达减振控制及滑动减振控制。另外,在此,ne2[rpm]是比后述的ne1[rpm]高的转速,能够通过实验求出。
[0095]
以这种方式,在发动机转速较高的高转速状态的情况下,发动机11的爆发间隔变短,因此发动机11的扭矩振动的频率变高,即使该扭矩振动传递至驱动轮dw,对于驾驶员来说也不容易感知到。因此,在这样的情况下,控制装置30通过不执行马达减振控制以及滑动减振控制,能够避免nv特性的恶化,并且能够抑制由执行马达减振控制引起的消耗电力的增加、以及由执行滑动减振控制引起的燃料消耗性能的降低。
[0096]
[第一减振区域]
[0097]
如图6所示,第一减振区域被设定为包含如下区域,该区域中,扭矩大于扭矩特性tcl所表示的扭矩(即停缸底部扭矩)且小于或等于扭矩特性tc2所表示的扭矩(即停缸底部扭矩与马达上限扭矩之和)。具体而言,第一减振区域为包含如下区域,该区域中,扭矩大于扭矩特性tc1所表示的扭矩且小于或等于扭矩特性tc2所表示的扭矩,并且是发动机转速小于ne1[rpm]的区域。另外,在此,ne1[rpm]是比停缸运转时的发动机转速的最小值(例如怠速转速)即ne0[rpm]高的转速,能够通过实验求出。
[0098]
在停缸运转时的曲轴端要求扭矩及发动机转速包含于这样的第一减振区域的情况下,控制装置30执行马达减振控制及滑动减振控制。即,在曲轴端要求扭矩及发动机转速包含于第一减振区域的情况下,处于曲轴端要求扭矩较大的高负荷状态,以从发动机11输
出的发动机扭矩也变大的方式进行控制,因此发动机11的扭矩振动也变大。
[0099]
另一方面,在曲轴端要求扭矩及发动机转速包含于第一减振区域的情况下,执行停缸底部辅助控制,因此与未执行停缸底部辅助控制时相比,从马达上限扭矩的观点出发,电动发电机12能够输出的减振扭矩被限制。其结果是,相对于发动机11的扭矩振动而言减振扭矩不足,仅通过马达减振控制有可能无法充分降低传递至驱动轮dw的扭矩振动。
[0100]
而且,在曲轴端要求扭矩及发动机转速包含于第一减振区域的情况下,由于发动机转速为小于ne1[rpm]的低转速状态,因此发动机11的扭矩振动的频率也变低,若这样的扭矩振动传递至驱动轮dw,则成为给驾驶员带来不适感的振动的主要原因。
[0101]
因此,在曲轴端要求扭矩及发动机转速包含于第一减振区域的情况下,控制装置30通过执行马达减振控制及滑动减振控制来避免nv特性的恶化,并且通过执行停缸底部辅助控制来确保适当的曲轴端扭矩。由此,能够避免nv特性的恶化,并且也能够避免驾驶性能降低。
[0102]
[第二减振区域]
[0103]
如图6所示,第二减振区域被设定为包含如下区域,该区域中,扭矩小于或等于扭矩特性tcl所表示的扭矩且大于或等于tq0[nm]。具体而言,第二减振区域包括区域601,该区域601中,扭矩处于与非减振区域对应的低负荷状态和与第一减振区域对应的高负荷状态之间的中负荷状态。另外,区域601例如是发动机转速小于ne1[rpm]的区域(即与低转速状态对应的区域)。
[0104]
在停缸运转时的曲轴端要求扭矩及发动机转速包含于这样的区域601的情况下,控制装置30执行马达减振控制而不执行滑动减振控制。即,在曲轴端要求扭矩及发动机转速包含于区域601的情况下,虽然设想曲轴端要求扭矩大到一定程度,发动机11的扭矩振动也大到一定程度,但认为由于不执行停缸底部辅助控制,因此能够确保电动发电机12能够输出的减振扭矩,仅通过马达减振控制就能够充分降低传递至驱动轮dw的扭矩振动。
[0105]
因此,控制装置30在曲轴端要求扭矩及发动机转速包含于第二减振区域的区域601的情况下,执行马达减振控制而不执行滑动减振控制,由此能够避免nv特性的恶化,并且能够抑制因执行不必要的滑动减振控制而导致的燃料消耗性能的降低。
[0106]
另外,如图6所示,第二减振区域被设定为包含如下区域602,该区域602中,发动机转速大于或等于ne1[rpm]且小于ne2[rpm]。换言之,发动机转速处于与非减振区域对应的高转速状态和与第一减振区域对应的低转速状态之间的中转速状态,区域602是与中转速状态对应的区域。另外,区域602为扭矩大于或等于扭矩特性tc1所表示的扭矩的区域(即与高负荷状态对应的区域)。
[0107]
在停缸运转时的曲轴端要求扭矩及发动机转速包含于这样的区域602的情况下,控制装置30执行马达减振控制而不执行滑动减振控制。即,在曲轴端要求扭矩及发动机转速包含于区域602的情况下,处于曲轴端要求扭矩较大的高负荷状态,以从发动机11输出的发动机扭矩也变大的方式进行控制,因此发动机11的扭矩振动也变大。
[0108]
另一方面,在曲轴端要求扭矩及发动机转速包含于区域602的情况下,执行停缸底部辅助控制,因此与未执行停缸底部辅助控制时相比,电动发电机12能够输出的减振扭矩被限制。其结果是,相对于发动机11的扭矩振动而言减振扭矩不足,仅通过马达减振控制有可能无法充分降低传递至驱动轮dw的扭矩振动。
[0109]
然而,在曲轴端要求扭矩以及发动机转速包含于区域602的情况下,与包含于第一减振区域的情况不同,发动机转速处于大于或等于ne1[rpm]的高至某种程度的中转速状态,因此,即使相对于发动机11的扭矩振动而言减振扭矩不足而扭矩振动有某种程度的残留,也由于扭矩振动的频率比较高,因此认为这对于驾驶员而言不容易感知到。
[0110]
因此,控制装置30在曲轴端要求扭矩及发动机转速包含于第二减振区域的区域602的情况下,执行马达减振控制而不执行滑动减振控制,由此能够避免nv特性的恶化,并且能够抑制因执行不必要的滑动减振控制而导致的燃料消耗性能的降低。
[0111]
如以上说明的那样,根据本实施方式的控制装置30,通过设置不执行马达减振控制以及滑动减振控制的非减振区域、执行马达减振控制以及滑动减振控制的第一减振区域、以及执行马达减振控制而不执行滑动减振控制的第二减振区域,能够适当地执行减振控制,能够避免车辆1的nv特性的恶化,并且提高燃料消耗性能。
[0112]
另外,根据变速器tm的变速档,发动机扭矩传递至驱动轮dw为止的衰减率不同。因此,也可以与变速器tm能够采用的各变速档对应地分别预先准备决定了非减振区域、第一减振区域以及第二减振区域的映射,控制装置30参照与此时的变速档对应的映射来判断是否仅执行马达减振控制、是否除了执行马达减振控制之外还执行滑动减振控制。以这种方式,考虑到变速器tm的变速档、即发动机扭矩传递至驱动轮dw为止的衰减率,控制装置30能够适当地执行减振控制。
[0113]
以上,对本发明的实施方式进行了说明,但本发明并不限定于上述实施方式,能够适当地进行变形、改良等。
[0114]
例如,在上述的实施方式中,对发动机11和电动发电机12经由曲轴11a连结的例子进行了说明,但不限于此。例如,电动发电机12也可以连结于与驱动轮dw一体旋转的驱动轴。
[0115]
另外,在本说明书中至少记载有以下事项。此外,在括号内示出了在上述的实施方式中对应的构成要素等,但并不限定于此。
[0116]
(1)一种车辆控制装置(控制装置30),其对车辆(车辆1)进行控制,所述车辆具备内燃机(发动机11)、电动机(电动发电机12)、驱动轮(驱动轮dw)、以及设置于从所述内燃机及所述电动机到所述驱动轮的动力传递路径的锁止离合器(锁止离合器134),其中,
[0117]
所述内燃机构成为能够切换使全部的气缸运转的全缸运转和在使一部分的气缸停歇的状态下运转的停缸运转,
[0118]
所述锁止离合器能够采用联接状态和滑动状态,在所述联接状态中,将来自所述内燃机和所述电动机中的至少一方的输出高效地传递到所述驱动轮,在所述滑动状态中,将所述输出以比所述联接状态低的效率传递到所述驱动轮,
[0119]
由所述内燃机以及所述电动机构成的动力设备输出的动力设备扭矩在曲轴的轴端的扭矩称为曲轴端扭矩,所述车辆控制装置能够基于针对所述曲轴端扭矩的目标扭矩,来在所述全缸运转与所述停缸运转之间切换所述内燃机的运转状态,以及
[0120]
在使所述内燃机进行着停缸运转的情况下,所述车辆控制装置能够执行减振控制,所述减振控制降低向所述驱动轮传递的所述内燃机的扭矩振动,
[0121]
所述减振控制包括马达减振控制和滑动减振控制,所述马达减振控制从所述电动机输出减振扭矩,所述减振扭矩包含与从所述内燃机输出的发动机扭矩相反相位的扭矩,
所述滑动减振控制使所述锁止离合器成为所述滑动状态,
[0122]
在所述目标扭矩较小的低负荷状态、或者所述内燃机的转速较高的高转速状态的非减振区域中,所述车辆控制装置不执行所述马达减振控制以及所述滑动减振控制,
[0123]
在所述目标扭矩较大的高负荷状态、或者所述内燃机的转速较低的低转速状态的第一减振区域中,所述车辆控制装置执行所述马达减振控制及所述滑动减振控制,以及
[0124]
在所述目标扭矩处于所述低负荷状态与所述高负荷状态之间的中负荷状态、或者所述内燃机的转速处于所述低转速状态与所述高转速状态之间的中转速状态的第二减振区域中,所述车辆控制装置执行所述马达减振控制而不执行所述滑动减振控制。
[0125]
根据(1),能够适当地执行减振控制,能够避免车辆1的nv特性的恶化,并且提高燃料消耗性能。
[0126]
(2)根据(1)所述的车辆控制装置,其中,
[0127]
在使所述内燃机进行着停缸运转的情况下,当所述目标扭矩达到第一扭矩(扭矩特性tc1)时,即,使所述内燃机进行停缸运转时的有效燃料消耗率即停缸有效燃料消耗率的值最小时,能够执行停缸底部辅助控制,在所述停缸底部辅助控制中,将从所述内燃机输出的发动机扭矩维持在所述第一扭矩的同时,配合所述目标扭矩的增加来增加从所述电动机输出的马达扭矩,
[0128]
所述第一减振区域被设定为包含所述目标扭矩大于所述第一扭矩且小于或等于第二扭矩(扭矩特性tc2)的区域,
[0129]
所述第二扭矩是所述第一扭矩与所述电动机能够输出的马达上限扭矩之和。
[0130]
根据(2),在目标扭矩包含于第一减振区域的情况下,能够通过执行马达减振控制及滑动减振控制来避免nv特性的恶化,并且通过执行停缸底部辅助控制来确保适当的曲轴端扭矩。
[0131]
(3)根据(2)所述的车辆控制装置,其中,
[0132]
所述第二减振区域被设定包含所述目标扭矩小于或等于所述第一扭矩的区域(区域601)。
[0133]
根据(3),能够避免nv特性的恶化,并且能够抑制由于执行不必要的滑动减振控制而导致的燃料消耗性能的降低。
[0134]
(4)根据(2)所述的车辆控制装置,其中,
[0135]
所述第一减振区域被设定为包含所述目标扭矩比所述第一扭矩大且小于或等于所述第二扭矩、且所述内燃机的转速成为所述低转速状态的区域,
[0136]
所述第二减振区域被设定为包含所述目标扭矩比所述第一扭矩大且小于或等于所述第二扭矩、且所述内燃机的转速成为所述中转速状态的区域(区域602)。
[0137]
根据(4),能够避免nv特性的恶化,并且能够抑制由于执行不必要的滑动减振控制而导致的燃料消耗性能的降低。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1