双侧独立电驱动履带车多模式制动控制方法与流程
1.本发明涉及履带车辆制动技术领域,特别是一种双侧独立电驱动履带车多模式制动控制方法。
背景技术:
2.履带车辆的制动性能是指车辆在行驶过程中进行减速或停车的性能,良好的制动性能是履带车辆行驶安全性、可靠性的重要保证。当前履带车辆朝着高速大功率、高机动性能的方向发展,车辆速度的提高和有效荷载的增加对车辆的制动性能要求越来越高,采用传统的单一机械制动器无法满足这种需求,双侧独立电驱动履带车不仅拥有线控液压制动,还拥有驱动电机经由侧传动驱动主动轮的电驱动方式,还可利用驱动电机进行电制动,电机制动的优点是高速制动能力强,制动响应快,具备能量回收功能;缺点是电机的制动扭矩受本身特性决定,尤其双侧独立电驱动履带车工作的工况复杂,模式较多,液压制动系统与电机制动系统的联合制动具有重要意义。
3.中国发明专利cn201911043185.3公开了一种履带车辆机电联合制动控制方法及装置,首先计算地面最大制动力矩;然后获取由制动踏板行程计算得到的第一制动力矩,并通过比较所述地面最大制动力矩和所述第一制动力矩确定地面附着力是否饱和;依据地面附着力是否饱和,确定目标制动力矩;计算当前车速下两个电机所能提供的总电机制动力矩;根据所述目标制动力矩和所述总电机制动力矩,计算机械制动力矩;最后基于所述总电机制动力矩和所述机械制动力矩对履带车辆进行机电联合制动控制。
技术实现要素:
4.本发明需要解决的技术问题是提供一种双侧独立电驱动履带车多模式制动控制方法。
5.为解决上述技术问题,本发明包括一种双侧独立电驱动履带车多模式制动控制方法,包括以下步骤,判断行驶过程中操纵员是否控制车辆,如果否,则进入自主滑行制动模式;如果是,则进入正常行驶判断;正常行驶判断,如果是,则进入行车制动模式;如果否,则进入紧急情况紧急制动判断;紧急情况紧急制动判断,如果是,则进入紧急制动模式;如果否,则返回正常行驶判断;自主滑行制动模式,履带车驾驶员不进行操纵,车辆自主滑行直至车速为0,完成自主停车;紧急制动模式,车辆在行驶过程中遇到紧急情况时,操纵员迅速,正确的使用制动系统,在最短距离内将车停住;行车制动模式,行车过程中,采用行车制动,使得车辆逐步减速停车。
6.优选的,所述自主滑行模式、紧急制动模式和行车制动模式在车辆停车后,进入驻车制动模式,即在停车后给车辆一个阻力,使车辆不溜车。
7.优选的,所述驻车制动模式包括坡道模式和平路模式。
8.优选的,所述坡道模式下增加电机制动转矩的大小,确保液压制动转矩在建压完成前的下滑问题,弥补液压制动转矩不足。
9.优选的,所述平路模式下停车时间大于30s时,液压制动系统响应驻车命令,车辆进行驻车模式。
10.采用上述方法后,本发明基于双侧独立电驱动履带车,根据不同制动工况,提出了不同的联合制动控制方法,通过调节电机制动系统与液压制动系统对车辆进行控制,确保车辆在不同制动模式下保证车辆的安全、稳定。
附图说明
11.下面结合附图和具体实施方式对本发明作进一步详细的说明。
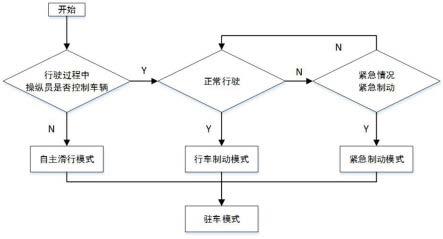
12.图1为本发明一种双侧独立电驱动履带车多模式制动控制方法的流程图。
具体实施方式
13.如图1所示,本发明包括一种双侧独立电驱动履带车多模式制动控制方法,包括以下步骤,包括以下步骤,判断行驶过程中操纵员是否控制车辆,如果否,则进入自主滑行制动模式;如果是,则进入正常行驶判断;正常行驶判断,如果是,则进入行车制动模式;如果否,则进入紧急情况紧急制动判断;紧急情况紧急制动判断,如果是,则进入紧急制动模式;如果否,则返回正常行驶判断。
14.自主滑行制动模式,履带车驾驶员不进行操纵,车辆自主滑行直至车速为0,完成自主停车。其控制方法如下:车辆进行行驶过程中,操纵员松开加速踏板、制动踏板,车辆无其他控制,此时,车辆会缓慢滑行一段,直至车速为0,当车辆进行自主滑行时,此时制动系统不进行车辆制动,使车辆完成自主停车,更好的执行操纵员命令。退出条件:操纵员重新控制车辆。
15.紧急制动模式,车辆在行驶过程中遇到紧急情况时,操纵员迅速,正确的使用制动系统,在最短距离内将车停住。其控制方法如下:当车辆在行驶过程中遇到紧急情况时,车辆必须尽快完成停车,此时操纵员会下达紧急制动命令,此时电机制动与液压制动联合制动,根据不同车速选取不同制动比例,当车辆完成停车之后,电机制动取消,液压制动达到理想驻车值。退出条件:操纵员关闭紧急制动命令。
16.行车制动模式,行车过程中,采用行车制动,使得车辆逐步减速停车。其控制方法如下:行车过程,操纵员对于车辆的减速停车控制主要采用液压制动控制,此时的电机制动不参加工作,操纵员根据实际情况控制液压制动系统的输入,保证车辆行车过程中的安全、稳定。退出条件:操纵员松制动踏板。
17.所述自主滑行模式、紧急制动模式和行车制动模式在车辆停车后,进入驻车制动
模式,即在停车后给车辆一个阻力,使车辆不溜车。驻车制动控制方法:车辆在不同环境中采用不同的驻车控制方法。
18.1)坡道模式:当操纵员对车辆进行驻车操作时,由于车辆在坡道上,由于驱动转矩的减少,液压制动转矩建压慢等情况,此时可能出现车辆下滑等情况,为此本发明在此工况下,增加电机制动转矩的大小,确保液压制动转矩在建压完成前的下滑问题,弥补液压制动转矩不足;退出条件:首先电机制动进行工作,电机转矩增大,方向为车辆前进方向,以确保液压制动系统退出过程中可能出现下滑的问题;2)平路模式:此时履带车停车后并不出现下滑现象,此时为了进一步确保车辆的安全、稳定,并同时保证操纵员接下来操作车辆的方便、连续,控制方法为停车时间大于30s时,液压制动系统响应驻车命令,车辆进行驻车模式。
19.退出条件:当操纵员准备车辆行驶时,首先液压制动系统转矩减小为0,为0之后,操纵员可对车辆进行控制。
20.虽然以上描述了本发明的具体实施方式,但是本领域熟练技术人员应当理解,这些仅是举例说明,可以对本实施方式作出多种变更或修改,而不背离本发明的原理和实质,本发明的保护范围仅由所附权利要求书限定。
技术特征:
1.一种双侧独立电驱动履带车多模式制动控制方法,其特征在于,包括以下步骤,判断行驶过程中操纵员是否控制车辆,如果否,则进入自主滑行制动模式;如果是,则进入正常行驶判断;正常行驶判断,如果是,则进入行车制动模式;如果否,则进入紧急情况紧急制动判断;紧急情况紧急制动判断,如果是,则进入紧急制动模式;如果否,则返回正常行驶判断;自主滑行制动模式,履带车驾驶员不进行操纵,车辆自主滑行直至车速为0,完成自主停车;紧急制动模式,车辆在行驶过程中遇到紧急情况时,操纵员迅速,正确的使用制动系统,在最短距离内将车停住;行车制动模式,行车过程中,采用行车制动,使得车辆逐步减速停车。2.按照权利要求1所述一种双侧独立电驱动履带车多模式制动控制方法,其特征在于,所述自主滑行模式、紧急制动模式和行车制动模式在车辆停车后,进入驻车制动模式,即在停车后给车辆一个阻力,使车辆不溜车。3.按照权利要求2所述一种双侧独立电驱动履带车多模式制动控制方法,其特征在于:所述驻车制动模式包括坡道模式和平路模式。4.按照权利要求3所述一种双侧独立电驱动履带车多模式制动控制方法,其特征在于:所述坡道模式下增加电机制动转矩的大小,确保液压制动转矩在建压完成前的下滑问题,弥补液压制动转矩不足。5.按照权利要求3所述一种双侧独立电驱动履带车多模式制动控制方法,其特征在于:所述平路模式下停车时间大于30s时,液压制动系统响应驻车命令,车辆进行驻车模式。
技术总结
本发明涉及履带车辆制动技术领域,特别是一种双侧独立电驱动履带车多模式制动控制方法,采用线控液压制动系统与电机制动系统联合控制,在判断车辆的形式状态下进行不同模式的制动控制,制动模式包括自主滑行模式、紧急制动模式、行车制动模式和驻车制动模式。采用上述方法后,本发明基于双侧独立电驱动履带车,根据不同制动工况,提出了不同的联合制动控制方法,通过调节驱动电机制动系统与液压制动系统对车辆进行控制,确保车辆在不同制动模式下保证车辆的安全、稳定。稳定。稳定。
技术研发人员:赵坤 刘英哲
受保护的技术使用者:江苏英拓动力科技有限公司
技术研发日:2022.04.26
技术公布日:2022/6/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1