用于控制车辆的计算机实现的方法与流程
1.本发明涉及用于控制车辆的计算机实现的方法、计算机程序、计算机可读介质、控制单元或控制单元组以及车辆。
2.本发明能够被应用于重型车辆,诸如卡车和公共汽车。尽管本发明将关于卡车进行描述,但是本发明不限于该特定类型的车辆,而且还可以被用于其它车辆类型,诸如厢式货车和小轿车。
背景技术:
3.对于车辆,特别是重型车辆,车辆的质量可以是车辆控制中的许多功能的重要参数。不正确的质量估计可能导致这种功能向车辆提供次最优控制。这进而可能增加车辆运营成本,诸如燃料消耗。另外,在有效载荷随时间显著地变化的车辆中,诸如在卡车中,车辆质量的估计带来特别的挑战。
4.例如,没有任何拖车的卡车可能具有大约8吨的质量。该牵引车质量在卡车运行期间可能不显著地变化。然而,仅牵引车操作与使用一辆或多辆拖车操作之间的操作的变化意味着质量可能在几吨到50吨、150吨,或甚至300吨之间变化。
5.对于质量估计,可以使用卡尔曼滤波器。众所周知,卡尔曼滤波使用随时间观察到的一系列测量值,并且产生的估计值往往比仅基于单个测量值的估计值更准确。
6.us20110066322a1描述在给定非线性离散时间模型的情况下,使用扩展卡尔曼滤波器(ekf)进行车辆质量估计。然而,问题是这种方法是一种局部收敛的估计方法。这意味着通过提供与真实质量相对较远的初始质量假设,可能导致估计也与真实质量相对较远,或者导致需要很长时间(例如,可能几个小时的驾驶时间)才能获得的正确估计。这对于卡车来说是一个特别的问题,因为卡车的质量变化可能产生与真实质量大大地偏离的初始质量假设。
技术实现要素:
7.本发明的目标是改进车辆控制。本发明的另一个目标是通过提供快速和准确的车辆质量估计来提供改进的车辆控制。
8.通过利用方法达到目标。因此,利用用于控制车辆的计算机实现的方法实现目标,所述控制通过使用表示车辆的动力的非线性模型执行,该非线性模型提供多个车辆状态参数之间的关系,该车辆状态参数包括车辆的质量和一个或多个其它状态参数。该方法包括:
[0009]-获得车辆的质量的值,
[0010]-接收其它状态参数中的一个或多个的多个时间序列测量第一值,
[0011]-使用一个或多个其它状态参数的多个测量第一值、非线性模型和具有第一滤波器调谐的扩展卡尔曼滤波器利用所获得的质量值作为起始值来计算车辆质量的第一多个时间序列值,其包括第一计算质量值,
[0012]-接收其它状态参数中的一个或多个的多个时间序列测量第二值,以及
[0013]-使用一个或多个其它状态参数的多个测量第二值、非线性模型和具有第二滤波器调谐的扩展卡尔曼滤波器、利用第一计算质量值作为起始值来计算车辆质量的第二多个时间序列值,其包括第二计算质量值。
[0014]-使第二滤波器调谐不如第一滤波器调谐强烈。
[0015]-该方法进一步包括在控制车辆时使用第二计算质量值。
[0016]
车辆可以是任何地面车辆类型或道路车辆类型,诸如卡车或公共汽车等的重型车辆,或诸如厢式货车或汽车等的另一类型的车辆。车辆可以具有任何合适类型的动力传动系统。例如,动力传动系统可以包括内燃机作为唯一的推进设备,动力传动系统可以是混合动力传动系统,或者动力传动系统可以包括电动机作为唯一的推进设备。车辆可以包括用于推进设备的电池组或燃料电池。
[0017]
可以通过假设车辆质量值来完成获得车辆质量值的步骤。例如可以根据来自一个或多个传感器的信号完成假设车辆的质量的值,该一个或多个传感器被布置成检测车辆的车轮悬架上的负载。例如,这种一个或多个传感器可以被布置成检测车辆的空气悬架系统中的压力。在车辆的一个或多个但不是所有的车轴被设置有空气悬架的情况下,可以根据传感器信号和对车辆质量分布的假设来假设车辆质量值。在一些情况下,根据关于车辆的推进系统的转矩的数据以及关于车辆正在行驶的道路的倾斜度的数据,可以完成假设车辆质量值的步骤。
[0018]
在一些实施例中,可以通过先前的计算完成获得车辆的质量的值的步骤。例如,该方法可以包括:在接收多个测量第一其它状态参数值的步骤之前,使用一个或多个其它状态参数的多个先前测量的第一值、非线性模型和具有先前滤波器调谐的扩展卡尔曼滤波器、利用先前质量值作为起始值来计算车辆质量的先前多个时间序列值,其包括所获得的质量值。
[0019]
第一滤波器调谐可以是相对强烈的滤波器调谐。第二滤波器调谐可以是相对柔和的滤波器调谐。因此,两个不同滤波器调谐被用于质量估计。以下是如何调整滤波器的实例。强烈滤波器调谐可以给出质量估计出现相对较大程度的波动。然而,强烈过滤器调谐可以在相对较短的时间内相对接近真实的质量值。因此,强烈滤波器调谐可以使估计值足够接近真实值,以便柔和滤波器调谐接管。因此,可以通过柔和滤波器调谐提供准确的估计。而且,已经通过第一滤波器调谐、第二柔和滤波器调谐使估计值相对接近真实值可以在相对较短的时间长度内达到真实值。另外,已经通过第一滤波器调谐使估计值相对接近真实值降低第二滤波器调谐导致估计值收敛到不正确值的风险。
[0020]
因此,可以提供快速且准确的车辆质量估计。因此,可以改进车辆控制方法。例如,在车辆包括用于其推进的内燃发动机的情况下,动力传动系统挡位选择和换挡定时通常根据车辆质量的估计进行。通过本发明的实施例提供的快速建立的准确质量估计可以增加为最小化燃料消耗而优化的挡位选择和换挡定时的量。这可以确保高燃料效率。本发明还可以允许快速适应使车辆的行车制动器的使用最小化的驾驶策略。因此,可以减少行车制动器的磨损。考虑到诸如电池或电池组的电存储设备的健康状态,快速建立的准确质量估计还可以允许快速适应驾驶策略。本发明还允许快速适应使车辆的任何其他退化最小化的驾驶策略。快速驾驶策略适应也有利于车辆的驾驶性能。具体地,快速达到的准确换挡策略将改进车辆驾驶员的驾驶体验。
[0021]
应注意,在通过假设车辆质量值获得车辆质量值的步骤的情况下,第二计算质量值可以被用于确定用于初始车辆质量值假设的任何传感器数据的准确性。如果第二计算质量值接近初始车辆质量值假设,则传感器数据可以被接受为正确的。如果第二计算质量值不接近初始车辆质量值假设,则第二计算质量值可以被用作车辆控制中的车辆质量值。
[0022]
优选地,非线性模型表示车辆的纵向动力,其中该方法包括在车辆的纵向控制中使用第二估计质量值。因此,在本发明的实施例中,可以使用用于车辆纵向运动的模型。因此,质量估计对于提高卡车的燃料效率可能尤其有用。
[0023]
一个或多个其它状态参数可以包括车辆的速度、空气阻力系数、滚动阻力系数和车辆正在行驶的道路的倾斜度中的一个或多个。因此,可以使用对质量估计特别有用的参数。具体地,本发明的实施例可以给出关于道路倾斜度的准确估计。这可以被用于检查车辆的倾斜度传感器的准确性。如下面所例示,在倾斜度估计不同于倾斜度传感器指示的情况下,估计可以被用于将偏移,本文中也称为道路倾斜度测量调整,添加到传感器指示。因此,可以通过传感器指示和偏移给出准确的道路倾斜度数据。
[0024]
在本发明的实施例中,车辆的动力可以通过以下非线性等式来描述:
[0025]
(1)
[0026]
其中f是车轮上的总力,g是重力加速度,m是车辆质量,v是车辆速度,dv/dt表示速度的时间导数,即车辆加速度,cair是空气阻力系数,cr是滚动阻力系数,α是道路坡度,即道路倾斜度。为了使用这种非线性等式估计车辆质量,使用扩展卡尔曼滤波器(ekf)。可以如在通过引用并入本文中的以下文档中描述使用扩展卡尔曼滤波器:“extended kalman filter tutorial”(扩展卡尔曼滤波器教程),gabriel a.terejanu,布法罗大学计算机科学与工程系,纽约布法罗14260。
[0027]
柔和或强烈的卡尔曼滤波器调谐可以取决于调谐参数,诸如状态不确定性协方差和/或(一个或多个)测量噪声方差,如下面例示。
[0028]
优选地,模型包括状态参数中的每一个的状态不确定性和状态不确定性的协方差,其中使第二滤波器调谐不如第一滤波器调谐强烈包括:使第二滤波器调谐中的状态不确定性协方差不同于第一滤波器调谐中的状态不确定性协方差。因此,提供一种易于实现的从第一滤波器调谐改变到第二滤波器调谐的方式。
[0029]
例如,上面的等式(1)可以在离散时域中用公式表示如下:
[0030]
(1a)
[0031]
(1b)m
k+1
=mk+w2[0032]
(1c)
[0033]
(1d)
[0034]
(1e)
[0035]
离散时域中的这种公式适用于扩展卡尔曼滤波器的估计框架。因此,w1、w2、w3、w4和w5各自表示相应状态参数的状态不确定性。状态不确定性可以共同地表示所谓的模型不
确定性。状态不确定性的协方差可以形成协方差矩阵。因此,从第一滤波器调谐到第二滤波器调谐的切换可以包括改变状态不确定性协方差矩阵。
[0036]
在具有以上等式1a-1e的实例中,状态不确定性w1-w5的协方差矩阵可以是具有五列和五行的矩阵。在一些实施例中,调整矩阵的对角线的仅五个元素中的一个或多个,以用于从第一滤波器调谐切换到第二滤波器调谐。
[0037]
应理解,除了车辆质量估计之外,本发明的实施例还提供对诸如滚动阻力、空气阻力和/或道路倾斜度的其它状态参数的同时估计。如所建议,道路倾斜度估计可以被用于提供道路倾斜度偏移,以被用作将例如通过倾斜度传感器添加到测量的道路倾斜度的值。因此,可以使车辆控制更加稳健。例如,道路倾斜度偏移可以为其它参数创建更稳定的估计结果。替代地或另外,通过本发明的实施例提供的道路倾斜度的估计可以被用于监测车辆的道路倾斜度传感器中的任何故障。
[0038]
优选地,模型包括测量函数,该测量函数基于相应测量噪声的值和相应测量噪声的方差来调整一个或多个其它状态参数的测量第一值和第二值。因此,使第二滤波器调谐不如第一滤波器调谐强烈可以包括使第二调谐中的测量噪声的方差不同于第一调谐中的测量噪声的方差。因此,提供易于实现的从第一滤波器调谐改变到第二滤波器调谐的另一方式。
[0039]
例如,在测量车辆速度的情况下,测量函数可以基于速度测量噪声的值和速度测量噪声的方差来调整速度的测量值。具体地,可以在仅测量车辆速度的情况下进行这样的调整。函数可以被表示为
[0040]
(2a)y
kv
=vk+μ
kv
[0041]
在离散时域中,其中μkv是速度测量噪声。因此,速度测量噪声的方差在第一滤波器调谐和第二滤波器调谐中可以不同。
[0042]
另外,在测量道路倾斜度的情况下,例如在仅测量道路倾斜度的情况下,测量函数可以基于道路倾斜度测量噪声的值和道路倾斜度测量噪声的方差来调整道路倾斜度的测量值。例如,其它状态参数中的一个或多个的所调整的测量第一值和第二值可以包括车辆正在行驶的道路的倾斜度的第一值和第二值。
[0043]
在一些实施例中,其它车辆状态参数包括道路倾斜度测量调整,该道路倾斜度测量调整是车辆正在行驶的道路的倾斜度测量的调整。因此,该方法可以包括例如通过假设获得道路倾斜率测量调整的值;以及使用一个或多个其它状态参数的多个测量第一值、非线性模型和具有第一滤波器调谐的扩展卡尔曼滤波器利用所获得的道路倾斜度测量调整值作为起始值来计算道路倾斜度测量调整的第一多个时间序列值,其包括第一计算道路倾斜度测量调整值。该方法可以进一步包括使用一个或多个其它状态参数的测量第二值、非线性模型和具有第二滤波器调谐的扩展卡尔曼滤波器、利用第一计算道路倾斜度测量调整值作为起始值来计算道路倾斜度测量调整的第二多个时间序列值,其包括第二计算道路倾斜度测量调整值。第二计算道路倾斜度测量调整值可以被用于控制车辆。
[0044]
还如下文建议,第二计算道路倾斜度测量调整值可以被用于调整道路倾斜度的测量。因此,可以校正不正确的道路倾斜度测量。这将改进车辆质量估计。这还将改进车辆的控制。
[0045]
而且,在一些实施例中,道路倾斜度可以在模型中被视为随时间变化。因此,道路
倾斜度可以在模型中使用,而不是在测量函数中使用。因此,可以忽略所测量的道路倾斜度的方差。因此,道路倾斜度测量调整值可以是未知状态。这将降低质量估计的复杂性。然而,在这种实施例中,状态参数的状态不确定性的协方差矩阵可以取决于道路倾斜度。
[0046]
为了提供强烈和柔和调谐,可以根据测试设置卡尔曼滤波器。例如,该方法可以包括存储来自历史车辆操作的质量估计过程的数据。这种数据可以被存储为可由用于估计所涉及的车辆的质量的控制单元访问。可以根据这种存储的数据提供第一和第二滤波器调谐。
[0047]
存储的数据可以针对不同的情况进行分类。例如,可以使用来自被提供与车辆相同类型的发动机的车辆的数据,该车辆的质量要被估计。此外,为了设置第一滤波器调谐和第二滤波器调谐,可以确定车辆的车辆配置。该配置可以包括不带拖车的牵引车和带半拖车的牵引车。例如车辆的驾驶员的用户可以借助于用户界面,例如车辆驾驶室中的触摸显示器输入车辆配置。因此,来自具有与所涉及的车辆相同的车辆配置的车辆的历史操作的数据可以被用于设置第一滤波器调谐和第二滤波器调谐。
[0048]
在一些实施例中,可以根据多个滤波器调谐的结果来确定第一滤波器调谐和/或第二滤波器调谐。例如,滤波器调谐可以相互具有不同的调谐参数值。可以基于来自历史车辆操作的所存储的数据和/或随机地选择调谐参数值。
[0049]
更具体地,可以从具有多个滤波器调谐中的滤波器调谐的质量估计试验中选择第一滤波器调谐。因此,质量估计的标准偏差的最小值可以用作用于从多个滤波器调谐中选择第一滤波器调谐的标准。例如,可以至少近似地已知不带拖车的车辆的质量,以及可能带有拖车和最大负载的车辆的质量。可以将质量估计最小标准偏差设置成与这些已知质量值中的至少一个相关的合适值,例如设置成没有拖车的车辆质量的一半。此外,可以将质量估计最大标准偏差设置成与这些已知质量值中的至少一个相关的合适值。给定高于质量估计最小标准偏差以及可选地低于质量估计最大标准偏差的质量估计标准偏差,可以从多个滤波器调谐中选择第一滤波器调谐作为滤波器调谐。
[0050]
相同的选择过程能够被用于第二滤波器调谐。因此,质量估计的标准偏差的最小值可以用作用于从多个滤波器调谐中选择第二滤波器调谐的标准。
[0051]
当然,为了设置第一滤波器调谐和/或第二滤波器调谐,代替质量估计标准偏差,可以使用所测试的多个滤波器调谐的质量估计方差。
[0052]
如所建议,可以根据多个滤波器调谐的结果来确定第一滤波器调谐和/或第二滤波器调谐。在模型包括每个状态参数的状态不确定性和状态不确定性的协方差的情况下,协方差可以在一个滤波器调谐与另一滤波器调谐之间不同。具体地,协方差可以在一个第一滤波器调谐与另一第一滤波器调谐之间不同,和/或协方差可以在一个第二滤波器调谐与另一第二滤波器调谐之间不同。因此,可以从滤波器调谐的相应组中选择第一和第二滤波器调谐,使得第二滤波器调谐不如第一滤波器调谐强烈。
[0053]
在测量状态参数的情况下,来自传感器制造商的用于测量状态参数的传感器的分辨率可以被用作传感器测量噪声方差的初始假设。另外,这种传感器分辨率可以被用于状态不确定性协方差中的元素的初始假设。
[0054]
应注意,在一些实施例中,非线性模型还可以表示车辆的横向动力,其中该方法包括在车辆的横向控制中使用第二估计质量值。
[0055]
优选地,该方法包括确定指示车辆质量的第一多个计算的值中的一个或多个值的准确性的计算性能指标的值;以及取决于计算性能指标值,执行从使用具有第一滤波器调谐的扩展卡尔曼滤波器到使用具有第二调谐的扩展卡尔曼滤波器的改变。因此,性能指标可以包括在车辆质量的第一多个计算的值中的多个值的方差。可以将性能指标值与指标阈值相比较,并且可以取决于该比较执行卡尔曼滤波器改变。性能指标值对车辆质量的第一多个计算的值中的值的依赖性可以取决于第一多个计算的值中的值的时期。
[0056]
因此,性能指标可以用作改变柔和卡尔曼滤波器调谐的条件。有利地,性能指标是,或取决于车辆质量的第一多个时间序列值的方差。此外,性能指标可以考虑质量的依赖“遗忘因子”的变化。例如,质量估计越早,它对进一步估计的价值就越小。
[0057]
因此,可以基于车辆质量的第一多个计算值中的少于所有值完成性能指标值确定,其中从性能指标值确定中排除第一多个计算值中的早于时期阈值的值。替代地或另外,质量估计可以根据它们相应的时期在性能指标确定中具有逐渐减小的权重。
[0058]
因此,根据涉及真实车辆行驶的测试,可以减少质量估计的波动行为。随着性能指标下降并低于指标阈值,切换到柔和滤波器调谐可以发生。
[0059]
例如,所述性能指标可以利用递归最小二乘算法实现。性能指标可以根据以下等式被表示为车辆质量的时间序列值的方差:
[0060]
(3)
[0061]
该性能指标能够在任何时间实例k0计算。性能指标取决于由γ和β表示的遗忘因子。该遗忘因子允许性能指标在计算车辆质量的第一多个时间序列值的步骤开始时忽略任何粗略估计行为。因此,与在估计过程开始时的估计质量相比,在切换到第二滤波器调谐时的估计质量给出更高的置信度。
[0062]
在一些实施例中,车辆是重型车辆。因此,将本发明用于特别有益的用途,因为如所建议,重型车辆的有效载荷以及因此重型车辆的质量可以显著地变化。根据美国联邦公路管理局(fhwa)的卡车分类,重型车辆是指车辆总重额定值(gvwr)超过26000磅的车辆。应注意,车辆可以是牵引车、拖车牵引车组合,或单个单元自卸卡车。然而,本发明还适用于轻型或中型车辆。
[0063]
一旦已经估计车辆的质量,该估计质量就可以被用于控制车辆。可能不需要再次执行本发明的实施例,直到例如由于车辆的装载或卸载事件而发生车辆质量的显著变化。本发明的实施例可以包括检测质量变化事件。这可以例如通过检测车辆悬架负载或轮胎压力的显著变化来完成。替代地或另外,质量变化事件可以由指示拖车是否被连接到车辆的牵引车的传感器检测。替代地或另外,质量变化事件可以由例如车辆驾驶员的用户在用户界面设备中的输入检测。在检测到质量变化事件时,根据本发明的实施例的方法可以再次被用于估计在事件之后的车辆质量。
[0064]
本发明的方面通过提供快速和准确的道路倾斜度估计来提供改进的车辆控制。该方面涉及用于控制车辆的计算机实现的方法,所述控制通过使用表示车辆的动力的非线性模型执行,该非线性模型给出多个车辆状态参数之间的关系,该车辆状态参数包括:道路倾斜度测量调整,该道路倾斜度测量调整是车辆正在行驶的道路的倾斜度测量的调整;以及一个或多个其它状态参数,该方法包括:
[0065]-获得道路倾斜度测量调整的值,
[0066]-接收状态参数中的一个或多个的多个时间序列测量第一值,
[0067]-使用一个或多个其它状态参数的多个测量第一值、非线性模型和具有第一滤波器调谐的扩展卡尔曼滤波器、利用所获得的道路倾斜度测量调整值作为起始值来计算道路倾斜度测量调整的第一多个时间序列值,其包括第一计算道路倾斜度测量调整值,
[0068]-接收其它状态参数中的一个或多个的多个时间序列测量第二值,以及
[0069]-使用一个或多个其它状态参数的多个测量第二值、非线性模型和具有第二滤波器调谐的扩展卡尔曼滤波器利用第一计算道路倾斜度测量调整值作为起始值来计算道路倾斜度测量调整的第二多个时间序列值,其包括第二计算道路倾斜度测量调整值,
[0070]-其中,使第二滤波器调谐不如第一滤波器调谐强烈,
[0071]-该方法进一步包括在控制车辆时使用第二计算道路倾斜度测量调整值。
[0072]
因此,第二计算道路倾斜度测量调整值可以被用于调整道路倾斜度的测量。因此,可以校正不正确的道路倾斜度测量。这将改进车辆的控制。可以借助于车辆的一个或多个倾斜度传感器测量道路倾斜度。第二计算道路倾斜度测量调整值能够被用于监测(一个或多个)这种传感器中的故障。
[0073]
一个或多个其它状态参数可以包括道路倾斜度,该道路倾斜度是车辆正在行驶的道路的倾斜度。因此,接收状态参数中的一个或多个的多个时间序列测量值可以包括接收道路倾斜度的多个时间序列测量值。而且,因此,接收其它状态参数中的一个或多个的多个时间序列测量第二值可以包括接收道路倾斜度的多个时间序列测量值。
[0074]
可以通过假设道路倾斜度测量调整值完成获得道路倾斜度测量调整值的步骤。因此,该假设值可以是道路倾斜度测量调整的起始值。例如,假设的道路倾斜度测量调整值可以是零。或者,假设的道路倾斜度测量调整值可以是存储在用于控制车辆的控制单元的存储器中的值。
[0075]
在一些实施例中,可以通过先前的计算完成获得道路倾斜度测量调整值的步骤。例如,该方法可以包括:在接收多个测量第一状态参数值的步骤之前,使用一个或多个状态参数的多个先前测量的第一值、非线性模型和具有先前滤波器调谐的扩展卡尔曼滤波器、利用先前的道路倾斜度测量调整值作为起始值来计算道路倾斜度测量调整的先前多个时间序列值,其包括所获得的道路倾斜度测量调整值。
[0076]
该方法可以包括通过确定或假设车辆质量值获得或建立车辆质量值。
[0077]
车辆质量可以是其它车辆状态参数中的一个,尽管不一定测量。在假设车辆质量值的情况下,该方法可以包括使用一个或多个其它状态参数的多个测量第一值、非线性模型和具有第一滤波器调谐的扩展卡尔曼滤波器利用所获得的(例如,假设的)质量值作为起始值来计算车辆质量的第一多个时间序列值,其包括第一计算质量值。该方法可以进一步包括使用一个或多个其它状态参数的多个测量第二值、非线性模型和具有第二滤波器调谐的扩展卡尔曼滤波器、利用第一计算质量值作为起始值来计算车辆质量的第二多个时间序列值,其包括第二计算质量值。
[0078]
然而,在一些实施例中,可以确定车辆质量。因此,可以在不使用扩展卡尔曼滤波器的情况下确定车辆质量。例如,在半挂牵引车不带挂车行驶的情况下,车辆的质量可以例如从制造商的数据已知。因此,可以通过接收指示车辆质量的数据确定车辆质量。因此,能够以特别高的准确度确定道路倾斜度测量调整值。
[0079]
目标还通过计算机程序、计算机可读介质、控制单元或控制单元组,或车辆实现。控制单元,或控制单元组中的每个控制单元,可以包括用于处理数据的处理器和存储器。控制单元,或控制单元组中的每个控制单元可以包括适合于运行程序的计算机。
[0080]
本发明的另一方面通过提供快速和准确的目标车辆状态参数估计来提供改进的车辆控制。目标车辆状态参数可以是任何合适的车辆状态参数。例如,目标车辆状态参数可以是车辆的质量。或者,目标车辆状态参数可以是道路倾斜度测量调整,该道路倾斜度测量调整是车辆正在行驶的道路的倾斜度测量的调整。该方面涉及用于控制车辆的计算机实现的方法,所述控制通过使用表示车辆的动力的非线性模型执行,该非线性模型提供多个车辆状态参数之间的关系,该车辆状态参数包括目标车辆状态参数和一个或多个其它状态参数,该方法包括
[0081]-获得目标车辆状态参数的值,
[0082]-接收其它状态参数中的一个或多个的多个时间序列测量第一值,
[0083]-使用一个或多个其它状态参数的多个测量第一值、非线性模型和具有第一滤波器调谐的扩展卡尔曼滤波器、利用所获得的目标车辆状态参数值作为起始值来计算目标车辆状态参数的第一多个时间序列值,其包括第一计算目标车辆状态参数值,
[0084]-接收其它状态参数中的一个或多个的多个时间序列测量第二值,以及
[0085]-使用一个或多个其它状态参数的多个测量第二值、非线性模型和具有第二滤波器调谐的扩展卡尔曼滤波器利用第一计算目标车辆状态参数值作为起始值来计算目标车辆状态参数的第二多个时间序列值,其包括第二计算目标车辆状态参数值,
[0086]-其中第二滤波器调谐不如第一滤波器调谐强烈,
[0087]-该方法进一步包括在控制车辆时使用第二计算目标车辆状态参数值。
[0088]
在以下描述中以及在从属权利要求中公开本发明的其它优点和有利特征。
附图说明
[0089]
参考附图,下面对作为示例引用的本发明的实施例进行更详细的描述。
[0090]
在图中:
[0091]
图1是车辆的侧视图。
[0092]
图2是描绘图1中的车辆的组件的框图。
[0093]
图3是描绘根据本发明的实施例的用于控制图1中的车辆的方法中的步骤的图。
[0094]
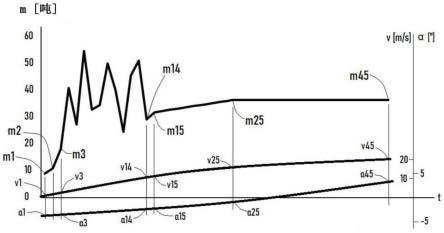
图4是示出根据时间的车辆质量的估计、车辆速度的估计和道路倾斜度的估计的图。
[0095]
图5是描绘图3中的方法中的部分步骤的图。
[0096]
图6是示出作为模拟的结果的车辆质量估计的图。
[0097]
图7是描绘根据本发明的更一般实施例的方法中的步骤的图。
[0098]
图8是描绘根据本发明的另一方面的实施例的方法中的步骤的图。
[0099]
图9是示出根据时间的道路倾斜度测量调整、车辆速度和道路倾斜度的估计的图。
具体实施方式
[0100]
图1示出车辆10。在该实例中,车辆10是卡车。车辆包括牵引车101和连接到牵引车
的半挂车102。应注意,本发明同样适用于其它类型的车辆,诸如小轿车、公共汽车、自卸卡车和采矿车。
[0101]
还参考图2。牵引车101包括动力传动系统。动力传动系统包括推进设备103。本发明的实施例可适用于各种推进设备。在该实例中,推进设备103是内燃机。在一些实施例中,推进设备可以包括电动机。推进设备可以是具有发动机和电机的混合布置。
[0102]
动力传动系统进一步包括变速器104,该变速器被布置成从推进设备103接收机械动力。变速器104被布置成将机械动力传递到车辆的至少一个轮轴的车轮。
[0103]
车辆进一步包括行车制动器(未示出)。
[0104]
车辆包括控制系统,所述控制系统被布置成控制车辆的功能,诸如车辆的推进和制动。控制系统包括控制单元组。控制系统包括中央控制单元201。中央控制单元201可以被提供作为单个物理单元或多个物理单元,该多个物理单元被布置成彼此通信。中央控制单元201可以位于牵引车101中。
[0105]
中央控制单元201被布置成与推进设备控制单元202通信,该推进设备控制单元被布置成控制推进设备103。中央控制单元201进一步被布置成与变速器控制单元203通信,该变速器控制单元被布置成控制变速器104。中央控制单元201进一步被布置成与制动控制系统(未示出)通信,该制动控制系统被布置成控制车辆的行车制动器。
[0106]
中央控制单元201被布置成从车辆速度传感器204接收信号,该车辆速度传感器被布置成测量车辆速度。车辆速度传感器可以被布置成通过测量车辆的车轮的旋转速度来测量车辆速度。
[0107]
中央控制单元201进一步被布置成从道路倾斜度传感器205接收信号,该道路倾斜度传感器被布置成测量车辆的纵向倾斜度。
[0108]
中央控制单元201进一步被布置成从一个或多个空气压力传感器206接收信号,该空气压力传感器被布置成测量车辆的空气悬架系统(未示出)中的压力。牵引车101的车轴可以被提供空气悬架,但是拖车102可以不被提供空气悬架系统。
[0109]
中央控制单元201还被布置成从拖车连接传感器207接收信号,该信号指示拖车102是否被连接到牵引车101。
[0110]
车辆还可以包括用于无线通信的设备(未示出)。中央控制单元201可以被布置成经由通信设备接收数据和发送数据。因此,中央控制单元可以被布置成与远离车辆定位的固定控制单元201通信。
[0111]
还参考图3,描绘根据本发明的实施例的用于估计车辆10的质量的方法中的步骤。对于商用车辆,例如当将货物和/或人员从一个位置运输到另一个位置时,可以使该方法。
[0112]
在操作中,通过使用表示车辆的动力的非线性模型来控制车辆。非线性模型可以被存储为可由中央控制单元201访问。非线性模型提供多个车辆状态参数之间的关系。车辆状态参数包括车辆的质量m。车辆状态参数还包括采用车辆速度v、滚动阻力系数cr、空气阻力系数cair和道路倾斜度α形式的其它状态参数。所述关系可以利用等式(1)(上文也给出)表示:
[0113]
(1)
[0114]
其中f是车轮上的总力,g是重力加速度,并且dv/dt是车辆加速度。因此,非线性模
型表示车辆的纵向动力。
[0115]
还参考图4,示出根据时间的车辆速度测量、道路倾斜度测量和车辆质量估计。图4仅作为实例给出。图4中所示的时间间隔可以是任何时间间隔,例如3秒,或30秒。
[0116]
该方法包括假设s1车辆的质量的值m1。为此,可以使用(一个或多个)空气压力传感器206。在牵引车101的车轴,但不是拖车102的车轴被设置空气悬架的情况下,可以取决于空气压力传感器信号以及对车辆的纵向质量分布的假设来假设车辆质量值。车辆质量分布可以提供总质量的一部分沿着车辆纵向方向的分布,而不提供绝对值。车辆质量分布可以取决于车辆的配置。因此,可以为没有拖车102的牵引车101提供假设的车辆质量分布,并且可以为牵引车101和拖车102的组合提供另一假设的车辆质量分布。假设的车辆质量分布可以被存储为可由中央控制单元201访问。
[0117]
对于质量估计,提供离散时域,即,将时间分成相等长度的时间步。当车辆正在移动时,在每个时间步,接收s2车辆速度的测量第一值v1-v14和道路倾斜度的测量第一值α1-α14。使用具有第一滤波器调谐的扩展卡尔曼滤波器,在每个时间步k+1,通过以下等式(上文也给出)更新s3来自前一时间步k的状态参数:
[0118]
(1a)
[0119]
(1b)m
k+1
=mk+w2[0120]
(1c)
[0121]
(1d)
[0122]
(1e)
[0123]
因此,ts是采样时间,提供所述时间步。时间步可以是例如20-1000ms,例如200ms。此外,w1-w5是相应状态参数v、m、cr、cair、αb的状态不确定性。αb是道路倾斜度车辆调整,该道路倾斜度车辆调整是道路倾斜度α测量的调整。上文讨论道路倾斜度测量调整αb。
[0124]
第一滤波器调谐取决于状态不确定性w1-w5的协方差。因此,使用速度和道路倾斜度的测量第一值v1-v14、α1-α14和具有第一滤波器调谐的扩展卡尔曼滤波器利用假设的质量值m1作为起始值来计算车辆质量的第一多个时间序列值m2-m14。
[0125]
非线性模型进一步包括测量函数,该测量函数基于测量噪声的值和测量噪声的方差来调整速度的测量第一值v1-v14。函数可以利用以下等式(上文也给出)表示:
[0126]
(2a)y
kv
=vk+μ
kv
[0127]
其中μkv是速度测量噪声。第一滤波器调谐取决于测量噪声μk的方差。
[0128]
该方法包括,在每个时间步,确定s4是否满足下面更详细描述的滤波器切换条件。如果不满足滤波器切换条件,则重复以下步骤:接收s2所测量的车辆速度和道路倾斜度的测量第一值v1-v14、α1-α14,并且更新s3状态参数。
[0129]
如果满足下文描述的滤波器切换条件,则扩展卡尔曼滤波器被改变成第二滤波器调谐。在第二滤波器调谐中,状态不确定性w1-w5的协方差不同于第一滤波器调谐中的状态不确定性w1-w5的协方差。
[0130]
当车辆保持移动时,在每个时间步,接收s5车辆速度的测量第二值v15-v45和道路
倾斜度的测量第二值α15-α45。使用具有第二滤波器调谐的扩展卡尔曼滤波器,在每个时间步k+1,通过以上等式1a-1e更新s6来自前一时间步k的状态参数。因此,来自具有第一滤波器调谐的最后一个时间步的状态参数值被用作起始值,该状态参数值包括质量值m14、速度值v14和道路倾斜度值α14。
[0131]
与使用第一滤波器调谐一样,根据以上等式2a的测量函数基于测量噪声的值和测量噪声的方差来调整速度的测量第二值v15-v45。在第二滤波器调谐中,测量噪声μkv的方差不同于第一滤波器调谐中的测量噪声μkv的方差。
[0132]
如上文所建议,通过适当地调整状态不确定性w1-w5的协方差和测量噪声μkv的方差,第二滤波器调谐不如第一滤波器调谐强烈。上文给出可以如何调整滤波器的实例。如所建议,强烈的滤波器调谐可能给出相对较大程度的质量估计波动,但它也可以在相对较短的时间内相对接近真实的质量值。因此,可以通过给出相对小的波动程度的柔和滤波器调谐来提供准确的估计。由于通过第一滤波器调谐已经使估计值相对接近真实值,因此柔和滤波器调谐可以在相对较短的时间长度内达到真实值。因此,可以提供快速且准确的车辆质量估计。
[0133]
还参考图5,示出在图3中的步骤s4的滤波器切换条件测试中的部分步骤。滤波器切换条件测试包括确定s41计算性能指标的值。该指标指示车辆质量的第一多个计算值中的一些或所有值m2-m14的准确度。如上文所建议,性能指标可以根据以下公式表示为车辆质量时间序列值的方差:
[0134]
(3)
[0135]
性能指标取决于由γ和β表示的遗忘因子。如所建议,遗忘因子允许性能指标在利用第一滤波器调谐的过程开始时忽略任何粗略的估计行为。
[0136]
将性能指标值pik与指标阈值进行比较s42。如上文所例示,如果性能指标值pik不低于指标阈值,则重复以下步骤:接收s2车辆速度和道路倾斜度的测量第一值v1-v14、α1-α14,并且更新s3状态参数。如上文所例示,如果性能指标值pik低于指标阈值,则扩展卡尔曼滤波器被改变成第二滤波器调谐。
[0137]
再次参考图3。方法包括确定s7是否终止质量估计过程。这能够通过替代方式完成。例如,可以选择最近确定的车辆质量值的组,并且可以确定该组中的车辆质量值的方差。如果该方差低于阈值,则可以终止质量估计过程。
[0138]
在终止质量估计过程时,最新质量值m45被用于控制车辆,例如控制发动机控制单元202和/或变速器控制单元203。
[0139]
图6中图示本发明的优点。在图6中,示出根据基于来自试驾的真实数据的计算机模拟的车辆质量估计。测试示出,使用根据本发明的实施例的方法,利用在大约0.5秒时从强烈滤波器调谐切换到柔和滤波器调谐,获得快速且准确的结果。作为比较,如果利用第一强烈滤波器调谐进行质量估计,则持续出现高度的波动。而且,如果从开始就使用第二柔和滤波器调谐进行质量估计,则结果是向真实质量值的缓慢移动。
[0140]
参考图7,描绘根据本发明的更一般实施例的用于控制车辆的方法中的步骤。该控制通过使用表示车辆的动力的非线性模型执行,该非线性模型提供多个车辆状态参数之间的关系。车辆状态参数包括车辆质量和一个或多个其它状态参数。该方法包括假设s1车辆质量值。该方法进一步包括接收s2测量的其它状态参数第一值。该方法进一步包括使用测
量的其它状态参数第一值、非线性模型和具有第一滤波器调谐的扩展卡尔曼滤波器、利用假设的质量值m1作为起始值来计算s3第一多个时间序列车辆质量值,包括第一计算质量值。该方法进一步包括接收s5测量的其它状态参数第二值。该方法进一步包括使用测量的其它状态参数第二值、非线性模型和具有第二滤波器调谐的扩展卡尔曼滤波器、利用第一计算质量值作为起始值来计算s6第二多个时间序列车辆质量值,包括第二计算质量值,第二滤波器调谐不如第一滤波器调谐强烈。该方法进一步包括在控制车辆时使用s8第二计算质量值。
[0141]
参考图8,描绘根据本发明的另一方面的实施例的用于估计道路倾斜度测量调整的方法中的步骤,该道路倾斜度测量调整是道路倾斜度的测量的调整。该方法与参考图1至图6描述的方法具有相似性。从下文理解与此的不同。
[0142]
在以上等式1中表示的非线性模型中,车辆质量可以已知或可以未知。在车辆质量已知的情况下,该方法可以被用于估计道路倾斜度测量调整。所测量的道路倾斜度α可以是等式1中的所测量的车辆状态参数。
[0143]
还参考图9,示出根据时间的车辆速度测量、道路倾斜度测量和车辆倾斜度测量调整估计。
[0144]
该方法包括假设s1道路倾斜度测量调整的值αb1。如在参考图4描述的方法中,提供离散时域。当车辆正在移动时,在每个时间步处,接收s2车辆速度的测量第一值v1-v14和道路倾斜度的测量第一值α1-α14。使用具有第一滤波器调谐的扩展卡尔曼滤波器并且假设车辆质量已知,在每个时间步k+1,通过上文给出的等式1a、1c、1d和1e更新s3来自前一时间步k的状态参数。因此,第一滤波器调谐取决于状态不确定性w2-w5的协方差。因此,使用速度和道路倾斜度的测量第一值v1-v14、α1-α14和具有第一滤波器调谐的扩展卡尔曼滤波器、利用假设的道路倾斜度测量调整αb1作为起始值来计算道路倾斜度测量调整的第一多个时间序列值αb2-αb14。
[0145]
如在参考图1至图6描述的方法中,非线性模型包括测量函数,该测量函数基于测量噪声的值和测量噪声的方差来调整速度的测量第一值v1-v14。函数可以利用以上等式2a表示。
[0146]
如在参考图1至图6描述的方法中,该方法包括在每个时间步处确定s4是否满足滤波器切换条件。这可以通过与参考图1至图6描述的方法类似的方式完成。如果不满足滤波器切换条件,则重复以下步骤:接收s2车辆速度和道路倾斜度的测量第一值v1-v14、α1-α14,并且更新s3状态参数。
[0147]
如果满足下文描述的滤波器切换条件,则扩展卡尔曼滤波器被改变成第二滤波器调谐。在该第二滤波器调谐中,状态不确定性w2-w5的协方差不同于第一滤波器调谐中的状态不确定性w2-w5的协方差。而且,在第二滤波器调谐中,测量噪声μkv的方差不同于第一滤波器调谐中的测量噪声μkv的方差。
[0148]
当车辆保持移动时,在每个时间步,接收s5车辆速度的测量第二值v15-v45和道路倾斜度的测量第二值α15-α45。使用具有第二滤波器调谐的扩展卡尔曼滤波器,在每个时间步k+1,通过以上等式1a和1c-1e更新s6来自前一时间步k的状态参数。因此,来自具有第一滤波器调谐的最后一个时间步的状态参数值被用作起始值,该状态参数值包括道路倾斜度测量调整值αb14、速度值v14和道路倾斜度值α14。
[0149]
如上文所建议,通过适当调整状态不确定性w2-w5的协方差和测量噪声μkv的方差,使第二滤波器调谐不如第一滤波器调谐强烈。强烈滤波器调谐可能给出相对较大程度的道路倾斜度测量调整估计波动,但它也可能在相对较短的时间内相对接近真实的质量值。因此,可以通过给出相对小的波动程度的柔和滤波器调谐来提供准确的估计。由于通过第一滤波器调谐已经使估计值相对接近真实值,因此柔和滤波器调谐可以在相对较短的时间长度内达到道路倾斜度测量调整的准确真实值。
[0150]
该方法包括确定s7是否终止道路倾斜度测量调整估计过程。这可以通过与参考图1至图6描述的方法类似的方式完成。
[0151]
在终止道路倾斜度测量调整估计过程时,其最新值αb45被用于控制车辆,例如控制发动机控制单元202和/或变速器控制单元203。
[0152]
应理解,本发明不限于上文描述和附图所示的实施例;相反,技术人员将认识到,可以在所附权利要求的范围内进行许多改变和修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1