辅助车辆的行驶的装置及其方法与流程
1.公开的发明涉及辅助车辆的行驶的装置,更具体地,涉及能够辅助车辆驶离道路及驶入道路的辅助车辆的行驶的装置及其方法。
背景技术:
2.在现代社会中车辆作为最普遍的移动手段,使用车辆的人数逐渐增多。随着车辆技术的发展,虽然具有容易实现长距离的移动并方便生活等优点,但在如韩国这样的人口密度高的地方,经常发生道路交通情况恶化而导致交通堵塞严峻的问题。
3.近年来,为了减轻驾驶者的负担并增加便利性,对搭载有能够主动地提供与车辆状态、驾驶者状态及周边环境相关的信息的高级驾驶者辅助装置(advanced driver assist system;adas)的车辆进行积极的研究。
4.作为搭载于车辆的高级驾驶者辅助装置的一例,具有前方冲撞避开系统(forward collision avoidance;fca)、紧急制动系统(autonomous emergency brake;aeb)、驾驶者注意警告系统(driver attention warning,daw)等。这样的系统是在车辆行驶的情况下判断与对象物之间的冲撞危险,在要发生冲撞的状况下通过紧急制动而避开冲撞并提供警告的系统。
5.但是,以往的驾驶者辅助系统例如对于车辆驶入高速道路或驶离高速道路时无法辅助驾驶者,因此驾驶者只能仅依靠车辆的导航信息来使车辆驶入高速道路或驶离高速道路。由此,经常发生车辆错过高速道路的入口路或出口路的情况。
技术实现要素:
6.发明要解决的课题
7.鉴于此,公开的发明的一个侧面提供一种能够辅助车辆驶离道路及驶入道路的辅助车辆的行驶的装置及其方法。
8.公开的发明的一个侧面提供一种根据导航的路径而引导车道的变更,从而能够辅助驶离道路及驶入道路的辅助车辆的行驶的装置及其方法。
9.用于解决课题的手段
10.公开的发明的一个侧面的辅助车辆的行驶的装置包括:摄像头,其设置于上述车辆,具备上述车辆的前方视野,并获得影像数据;及控制器,其处理上述影像数据。上述控制器基于对上述影像数据进行处理的情况,识别上述车辆的周边对象物及对上述车辆行驶的车道进行定义的车道线,上述控制器基于上述周边对象物的相对位置,识别上述车辆行驶的车道,上述控制器基于与追加车道的距离而控制上述车辆,以使上述车辆变更车道,该追加车道用于上述车辆从正在行驶的道路驶入出口路。
11.公开的发明的一个侧面的辅助车辆的行驶的方法包括:通过设置于上述车辆且具备上述车辆的前方视野的摄像头而获得影像数据;基于对上述影像数据进行处理的情况,通过处理器识别上述车辆的周边对象物及对上述车辆行驶的车道进行定义的车道线;基于
上述周边对象物的相对位置,通过上述处理器识别上述车辆行驶的车道;基于与追加车道的距离而通过上述处理器控制上述车辆,以使上述车辆变更车道,该追加车道用于上述车辆从正在行驶的道路驶入出口路。
12.发明效果
13.根据公开的发明的一个侧面,能够提供辅助车辆驶离道路及驶入道路的辅助车辆的行驶的装置及其方法。
14.根据公开的发明的一个侧面,根据导航的路径而引导车道的变更,从而能够辅助驶离道路及驶入道路的辅助车辆的行驶的装置及其方法。
附图说明
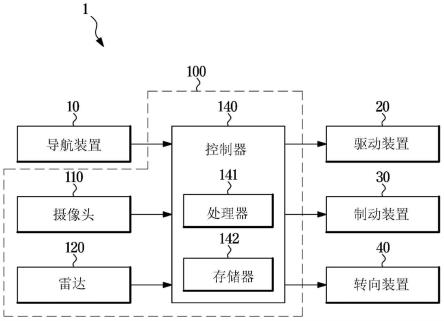
15.图1示出一个实施例的车辆及驾驶者辅助装置的结构。
16.图2示出包括在一个实施例的驾驶者辅助装置中的摄像头及雷达的视野。
17.图3示出包括在一个实施例的驾驶者辅助装置中的控制器的软件模块。
18.图4示出一个实施例的驾驶者辅助装置识别车辆行驶的车道的一例。
19.图5示出一个实施例的驾驶者辅助装置评价被识别为车辆行驶的车道的车道的可靠度的方法的一例。
20.图6示出一个实施例的驾驶者辅助装置将车辆引导至道路的出口路的方法的一例。
21.图7示出一个实施例的驾驶者辅助装置为了变更车辆的车道而生成的路径的一例。
22.图8示出一个实施例的驾驶者辅助装置为了变更车辆的车道而生成的路径的一例。
具体实施方式
23.在整个说明书中相同的符号表示相同的构成要件。本说明书并非对实施例的所有要件进行说明,对于公开的发明所属的技术领域中的一般的内容或实施例之间重复的内容省略说明。在说明书中使用的
‘
部,模块,部件,块’这样的用语可由软件或硬件来实现,根据实施例,多个
‘
部,模块,部件,块’由一个构成要件实现或一个
‘
部,模块,部件,块’包括多个构成要件。
24.在整个说明书中,在提及某个部分与其他部分“连接”时,这不仅包括直接连接的情况,而且还包括间接连接的情况,间接的连接包括通过无线通信网而连接的情况。
25.另外,在提及某个部分“包括”某个构成要件时,在没有特别相反的记载的情况下,并非排除其他构成要件,而且表示还可包括其他构成要件。
26.在整个说明书中,在提及某个部件位于另一个部件“上”时,不仅包括某个部件与另一个部件相接的情况,而且还包括在两个部件之间存在其他部件的情况。
27.第一、第二等用语用于将一个构成要件与其他构成要件区别开,该用语对构成要件不作限定作用。
28.在文中未明确排除的情况下,单数的表述包括多数的意思。
29.在各个步骤中序号是为了便于说明而使用的,序号并非表示各个步骤的顺序,在
文中未明确记载特定顺序的情况下,各个步骤可以与记载的顺序不同的顺序实施。
30.下面,参照附图,对公开的发明的作用原理及实施例进行说明。
31.图1示出一个实施例的车辆的结构。
32.如图1所示,车辆1包括导航装置10、驱动装置20、制动装置30、转向装置40及驾驶者辅助装置100。它们通过车辆用通信网络(nt)而可彼此进行通信。例如,包括在车辆1中的电气装置10、20、30、40、100通过以太网(ethernet)、面向媒体的系统传输(most,media oriented systems transport)、拐射线(flexray)、控制器局域网(can,controller area network)、本地互连网(lin,local interconnect network)等而收发数据。
33.导航装置10根据驾驶者的输入而生成到驾驶者所输入的目的地为止的路径,并将生成的路径提供给驾驶者。导航装置10通过全球导航卫星系统(global navigation satellite system,gnss)接收gnss信号,并基于gnss信号而识别车辆1的位置。导航装置10基于驾驶者所输入的目的地的位置(坐标)和车辆1的当前位置(坐标)而生成到目的地为止的路径。
34.导航装置10将地图数据及车辆1的位置数据提供给驾驶者辅助装置100。另外,导航装置10将与到目的地为止的路径相关的信息提供给驾驶者辅助装置100。例如,导航装置10将与用于车辆1驶入新道路的入口路的距离或与用于车辆1驶离当前正在行驶的道路的出口路的距离等信息提供给驾驶者辅助装置100。
35.驱动装置20使车辆1移动,例如包括发动机、发动机管理系统(engine management system,ems)、变速器和变速器控制单元(transmission control unit,tcu)。
36.发动机生成用于使车辆1行驶的动力,发动机管理系统对通过加速踏板而表示的驾驶者的加速意志或驾驶者辅助装置100的请求进行应答而控制发动机。
37.变速器将通过发动机而生成的动力减速传递到车轮,变速器控制单元对基于变速杆的驾驶者的变速命令及/或驾驶者辅助装置100的请求进行应答而控制变速器。
38.制动装置30使车辆1停止,例如包括制动卡钳和制动控制模块(brake control module,ebcm)。
39.制动卡钳利用与制动盘之间的摩擦而使车辆1减速或使车辆1停止,电子制动控制模块对基于制动踏板的驾驶者的制动意志及/或驾驶者辅助装置100的请求进行应答而控制制动卡钳。
40.例如,电子制动控制模块从驾驶者辅助装置100接收包括减速度的减速请求,并根据请求的减速度而电气性地或通过油压而控制制动卡钳,以使车辆1减速。
41.转向装置40包括电动转向控制模块(electronic power steering control module,eps)。
42.转向装置40可变更车辆1的行驶方向,电子转向控制模块对基于方向盘的驾驶者的转向意志进行应答而辅助转向装置40的动作,以使驾驶者容易操作方向盘。另外,电子转向控制模块对驾驶者辅助装置100的请求进行应答而控制转向装置。例如,电子转向控制模块从驾驶者辅助装置100接收包括转向扭矩的转向请求,并根据请求的转向扭矩而控制转向装置,以使车辆1进行转向。
43.驾驶者辅助装置100可向驾驶者提供各种功能。例如,驾驶者辅助装置100可提供车道脱离警告(lane departure warning,ldw)、车道保持辅助(lane keeping assist,
lka)、远光灯辅助(high beam assist,hba)、自动紧急制动(autonomous emergency braking,aeb)、交通标志板识别(traffic sign recognition,tsr)、巡航控制(adaptive cruise control,acc)和盲区感测(blind spot detection,bsd)等。
44.驾驶者辅助装置100包括摄像头110、雷达120和控制器140。驾驶者辅助装置100不限于图1所示的情况,还可包括对车辆1的周边进行扫描而感测对象物的雷达(lidar)。
45.如图2所示,摄像头110具备朝向车辆1的前方的视野(field of view)110a。摄像头110例如设置在车辆1的前挡风玻璃。
46.摄像头110对车辆1的前方进行拍摄,获得车辆1前方的影像数据。车辆1前方的影像数据包括与位于车辆1前方的其他车辆或步行者或骑车人(cyclist)或车道线(区分车道的标记)相关的信息。
47.摄像头110包括多个透镜及图像传感器。图像传感器包括将光转换为电信号的多个光电二极管,多个光电二极管以二维矩阵配置。
48.摄像头110与控制器140电连接。例如,摄像头110通过车辆用通信网络(nt)而与控制器140连接或通过硬线(hard wire)而与控制器140连接或通过印刷电路板(printed circuit board,pcb)而与控制器140连接。摄像头110将车辆1前方的影像数据传递给控制器140。
49.如图2所示,雷达120具备朝向车辆1的前方的感测视野(field of sensing)120a。雷达120例如设置于车辆1的护栅(grille)或保险杠(bumper)。
50.雷达120包括朝向车辆1的前方而发射发送电波的发送天线(或发送天线阵列)和接收从对象物反射的反射电波的接收天线(或接收天线阵列)。雷达120从通过发送天线而发送的发送电波和通过接收天线而接收的反射电波获得感测数据。感测数据包括与位于车辆1前方的其他车辆或步行者或骑车人相关的距离信息及速度程度。雷达120基于发送电波与反射电波之间的相位之差(或时间之差)而算出到对象物为止的状态距离,基于发送电波与反射电波之间的频率之差而算出对象物的相对速度。
51.雷达120例如通过车辆用通信网络(nt)或硬线或印刷电路板而与控制器140连接。雷达120将感测数据传递到控制器140。
52.可将控制器140称为ecu(electronic control unit:电子控制单元)或dcu(domain control unit:域控制单元)等各种各样的称呼。
53.控制器140与摄像头110及雷达120电连接。另外,控制器140通过车辆用通信网络(nt)而与导航装置10、驱动装置20、制动装置30及转向装置40连接。
54.控制器140与摄像头110及/或雷达120分离而设置。例如,控制器140设置于与摄像头110的外壳及/或雷达120的外壳分离的外壳。控制器140通过宽带的网络而与摄像头110及/或雷达120之间收发数据。
55.控制器140包括处理器141和存储器142。
56.处理器141对摄像头110的影像数据进行处理并对雷达120的感测数据进行处理。处理器141生成用于分别控制驱动装置10、制动装置20及转向装置30的驱动信号、制动信号及转向信号。
57.例如,处理器141包括对摄像头110的影像数据进行处理的图像处理器及/或对雷达120的感测数据进行处理的数字信号处理器及/或生成驱动信号/制动信号/转向信号的
微控制单元(micro control unit,mcu)。
58.存储器142存储有由处理器141处理影像数据的程序(例如多个指令的集合)及/或数据和用于处理感测数据的程序及/或数据。存储器142还存储有用于由处理器141生成驱动信号及/或制动信号及/或转向信号的程序及/或数据。
59.存储器142临时存储从摄像头110接收的影像数据及/或从雷达120、130接收的感测数据,并临时存储处理器141的影像数据及/或感测数据的处理结果。
60.存储器142不仅包括s-ram、d-ram等易失性存储器,而且还可包括闪存、只读存储器(read only memory,rom)、可擦可编程只读存储器(erasable programmable read only memory:eprom)等非易失性存储器。
61.控制器140在功能上包括收集车辆1及车辆1周边的对象物的信息的识别模块(perception module)146、生成避开与车辆1周边的对象物之间的冲撞的详细路径的判断模块(decision module)147、控制车辆1以使车辆1按照所生成的详细路径而行驶的控制模块(control module)148。识别模块146、判断模块147和控制模块148是存储于存储器142的软件模块(程序及数据)或包括在处理器141中的硬件模块(asic或fpga)。
62.控制器140的识别模块146可包括将摄像头110的影像数据和雷达120的感测数据融合而检测车辆1周边的对象物的传感器融合(sensor fusion)146a。
63.例如,控制器140基于摄像头110的影像数据和雷达120的感测数据而感测车辆1周边的对象物(例如,其他车辆、步行者、骑车人等)。
64.控制器140基于摄像头110的影像数据而获得车辆1的周边对象物的相对位置(与车辆的距离及相对于行驶方向的角度)及分类(例如,对象物是否为其他车辆或步行者或骑车人等)。控制器140基于雷达120的感测数据而获得车辆1的周边对象物的相对位置(与车辆的距离及相对于行驶方向的角度)及相对速度。另外,控制器140将通过感测数据而感测的对象物匹配到通过影像数据而感测的对象物,并基于匹配结果而获得车辆1的周边的对象物的分类、相对位置及相对速度。
65.另外,控制器140基于摄像头110的影像数据而获得与车辆1所行驶的道路的车道线相关的信息。例如,控制器140识别车道线的横向位置。
66.识别模块146包括基于摄像头110的影像数据、雷达120的感测数据、地图数据及车辆1的位置数据而识别车辆1的位置的位置测定(localization)146b。
67.例如,控制器140基于车辆1的位置数据而从地图数据识别车辆1周边的地标。控制器140基于影像数据及感测数据而识别与车辆1相关的地标的相对位置。控制器140基于根据地图数据而得到的地标的绝对坐标和根据影像数据及感测数据而得到的相对坐标,校正车辆1的位置数据。换言之,控制器140可识别车辆1的绝对坐标。
68.识别模块146包括将车辆1及车辆1周边的对象物投影到地图数据的地图投影(projection)146c。
69.例如,控制器140基于车辆1的位置数据而将车辆1投影到地图数据,并基于车辆1周边的对象物的相对位置及相对速度而将车辆1周边的对象物投影到地图数据。
70.控制器140的判断模块147包括基于周边对象物的相对位置和相对速度而预测与车辆1的周边对象物之间的冲撞,并识别冲撞危险的冲撞预测(collision risk decision)147a。
71.例如,控制器140基于周边对象物的位置(距离)和相对速度而算出直到车辆1与周边对象物之间发生冲撞为止的时间(time to collision,ttc)(或直到发生冲撞为止的距离,ttd)。另外,控制器140基于直到发生冲撞为止的时间或直到发生冲撞为止的距离而识别与周边对象物之间的冲撞危险。
72.判断模块147包括选定用于避开冲撞的目标或用于追踪的目标的目标选定(target selection)147b。
73.例如,控制器140在自动紧急制动中,基于冲撞危险(或直到发生冲撞为止的时间)而将冲撞危险最高的(或直到发生冲撞为止的时间最短的)周边对象物选定为目标。另外,控制器140在定速巡航中将在与车辆1所行驶的车道相同的车道上行驶的前方车辆选定为目标。
74.判断模块147包括生成用于避开与目标之间的冲撞的详细路径或用于到达目的地为止的详细路径的路径生成(path generation)147c。
75.例如,控制器140生成为了追踪目标而保持车道的详细路径或为了避开与目标之间的冲撞而变更车道的详细路径。
76.控制器140的控制模块148包括用于控制驱动装置20的驱动控制148a、用于控制制动装置30的制动控制148b和用于控制转向装置40的转向控制148c。
77.控制器140为了追踪目标或为了避开与目标之间的冲撞而生成驱动信号、制动信号或转向信号。例如,控制器140将使与目标之间的距离(或直到到达前方车辆的位置为止的时间)成为由驾驶者设定的距离的驱动信号及/或制动信号传送到驱动装置20及/或制动装置30。另外,控制器140将用于避开与目标之间的冲撞的制动信号及/或转向信号传送到制动装置30及/或转向装置40。
78.另外,控制器140从导航装置10获得与到目的地为止的路径相关的信息(例如,与道路的入口路或出口路的距离)。控制器140基于摄像头110的影像数据而获得与车辆1正在行驶的车道相关的信息(例如,车辆在从中央线起的第几个车道上行驶等)。控制器140基于与到目的地为止的路径相关的信息及与车道相关的信息,引导驾驶者变更车道或将用于变更车道的转向信号提供给转向装置40,以使车辆1驶离道路或驶入道路。
79.驾驶者辅助装置100不限于图2所示的情况,还可以包括扫描车辆1周边并感测对象物的雷达(lidar)。
80.驾驶者辅助装置100从导航装置10获得车辆1的到目的地为止的路径。另外,驾驶者辅助装置100生成车辆1从当前行驶的车道到达目的地的详细路径。例如,驾驶者辅助装置100识别是保持车辆1当前行驶的车道还是变更车道等,以到达目的地。
81.驾驶者辅助装置100为了生成车辆1的详细路径而识别车辆1当前行驶的车道。
82.控制器140从地图数据识别车辆1当前行驶的道路的车道的数量。
83.控制器140基于车辆1的周边对象物的位置而识别车辆1当前行驶的车道。
84.例如,控制器140基于影像数据及/或感测数据而识别车辆1周边的移动对象物(例如,其他车辆等)的相对位置及/或车辆1周边的静止对象物(例如,交通基础设施等)的相对位置及/或中央分隔带的相对位置。
85.控制器140基于周边对象物的相对速度而识别移动对象物和静止对象物。控制器140将周边对象物的相对速度与车辆1的行驶速度相同且行驶方向相反的周边对象物识别
为静止对象物。另外,当周边对象物的相对速度与车辆1的行驶速度不同时,控制器140将周边对象物识别为移动对象物。
86.控制器140基于周边对象物的相对位置而识别周边对象物所在的车道。控制器140基于周边对象物的相对位置而识别周边对象物的横向距离。另外,控制器140基于将横向距离除以车道宽度的商来识别周边对象物所在的车道。
87.控制器140基于周边对象物所在的车道而按照道路的每个车道而算出行驶车道分数,并基于所算出的行驶车道分数而识别车辆1所行驶的行驶车道。
88.例如,控制器140利用[数学式1]而算出基于在车辆1的左侧第a个车道上移动的移动对象物的行驶车道分数。
[0089]
[数学式1]
[0090]
p
m.left
[i]=0,i=0,...,a-1
[0091]
p
m.left
[i]=1,i=a,...,n-1
[0092]
在此,pm.left表示基于左侧移动对象物的行驶车道分数,a表示左侧移动对象物移动的车道的位置(左侧第a个车道),n表示道路的车道数量。
[0093]
这样,当在车辆1的左侧感测到移动对象物时,控制器140向感测到移动对象物的车道及其右侧的车道赋予行驶车道分数。
[0094]
控制器140利用[数学式2]而算出基于在车辆1的右侧第a个车道上移动的移动对象物的行驶车道分数。
[0095]
[数学式2]
[0096]
p
m.right
[i]=1,i=0,...,n-a-1
[0097]
p
m.right
[i]=0,i=n-a,...,n-1
[0098]
在此,pm.right表示基于右侧移动对象物的行驶车道分数,a表示右侧移动对象物移动的车道的位置(右侧第a个车道),n表示道路的车道数量。
[0099]
这样,当在车辆1的右侧感测到移动对象物时,控制器140对感测到移动对象物的车道及其左侧的车道赋予行驶车道分数。
[0100]
控制器140利用[数学式3]而算出基于位于车辆1的左侧第a个车道上的静止对象物的行驶车道分数。
[0101]
[数学式3]
[0102]
p
s.left
[i]=1,i=0,...,a-1
[0103]
p
s.left
[i]=0,i=a,...,n-1
[0104]
在此,ps.left表示基于左侧静止对象物的行驶车道分数,a表示左侧静止对象物所在的车道的位置(左侧第a个车道),n表示道路的车道数量。
[0105]
这样,当在车辆1的左侧感测到静止对象物时,控制器140向感测到静止对象物的车道的左侧车道赋予行驶车道分数。
[0106]
控制器140利用[数学式4]而算出基于位于车辆1的右侧第a个车道的静止对象物的行驶车道分数。
[0107]
[数学式4]
[0108]
p
s.right
[i]=0,i=0,...,n-a-1
[0109]
p
s.right
[i]=1,i=n-a,...,n-1
[0110]
在此,ps.right表示基于右侧静止对象物的行驶车道分数,a表示右侧静止对象物所在的车道的位置(右侧第a个车道),n表示道路的车道数量。
[0111]
这样,当在车辆1的右侧感测到静止对象物时,控制器140对感测到静止对象物的车道的右侧车道赋予行驶车道分数。
[0112]
控制器140利用[数学式5]而算出基于车辆1的中央分隔带的行驶车道分数。
[0113]
[数学式5]
[0114]
p
rb
[i]=1,i=a-1
[0115]
p
rb
[i]=0,i≠a-1
[0116]
在此,prb表示基于中央分隔带的行驶车道分数,a表示中央分隔带的位置(左侧第a个车道),n表示道路的车道数量。
[0117]
控制器140基于根据左侧移动对象物得到的行驶车道分数、根据右侧移动对象物得到的行驶车道分数、根据左侧静止对象物得到的行驶车道分数、根据右侧静止对象物得到的行驶车道分数及根据中央分隔带得到的行驶车道分数之和,识别车辆1正在行驶的车道。
[0118]
控制器140利用[数学式6]而识别车辆1正在行驶的车道。
[0119]
[数学式6]
[0120]
p[i]=p
m.left
[i]+p
m.right
[i]+p
s.left
[i]+p
s.right
[il+p
rb
[i]
[0121]
在此,p表示行驶车道分数,i表示(车道序号-1),pm.left表示基于根据左侧移动对象物而得到的行驶车道分数的行驶车道分数,pm.right表示基于根据右侧移动对象物而得到的行驶车道分数的行驶车道分数,ps.left表示基于根据左侧静止对象物而得到的行驶车道分数的行驶车道分数,ps.right表示基于根据右侧静止对象物而得到的行驶车道分数的行驶车道分数,prb表示基于根据中央分隔带而得到的行驶车道分数的行驶车道分数。
[0122]
控制器140识别1车道的行驶车道分数p[0]、2车道的行驶车道分数p[1]、3车道的行驶车道分数p[3]、
……
n车道的行驶车道分数p[n-1]中的最大行驶车道分数,将与最大行驶车道分数对应的车道识别为车辆1正在行驶的车道。
[0123]
图4示出一个实施例的驾驶者辅助装置用于识别车辆所行驶的车道的一例。
[0124]
如图4所示,第一移动对象物2在车辆1的左侧第二个车道上移动,第二移动对象物3在车辆1的左侧第一个车道上移动,第三移动对象物4在车辆1的右侧第一个车道上移动。
[0125]
可以是,基于第一移动对象物2的1车道的行驶车道分数pm.left[0]为0,2车道的行驶车道分数pm.left[1]为1,3车道的行驶车道分数pm.left[2]为1,4车道的行驶车道分数pm.left[3]为1。
[0126]
可以是,基于第二移动对象物3的1车道的行驶车道分数pm.left[0]为0,2车道的行驶车道分数pm.left[1]为0,3车道的行驶车道分数pm.left[2]为1,4车道的行驶车道分数pm.left[3]为1。
[0127]
可以是,基于第三移动对象物4的1车道的行驶车道分数pm.right[0]为1,2车道的行驶车道分数pm.right[1]为1,3车道的行驶车道分数pm.right[2]为0,4车道的行驶车道分数pm.right[3]为0。
[0128]
可以是,1车道的行驶车道分数p[0]为1,2车道的行驶车道分数p[1]为2,3车道的行驶车道分数p[2]为3,4车道的行驶车道分数p[3]为2。
[0129]
控制器140将行驶车道分数最高的3车道识别为车辆1正在行驶的车道。
[0130]
这样,控制器140对至少一个对象物(移动对象物或静止对象物)分别算出多个车道各自的行驶车道分数。控制器140算出多个车道各自的行驶车道分数之和,并基于多个车道各自的行驶车道分数之和而识别车辆1正在行驶的车道。
[0131]
之后,控制器140对识别为车辆1正在行驶的车道的车道的可靠性进行评价。
[0132]
图5示出一个实施例的驾驶者辅助装置评价识别为车辆行驶的车道的车道的可靠度的方法的一例。
[0133]
参照图5,对评价驾驶者辅助装置100识别的车辆1行驶的车道的可靠度的方法(1000)进行说明。
[0134]
驾驶者辅助装置100算出行驶车道分数(1010)。
[0135]
控制器140对至少一个对象物(移动对象物或静止对象物)分别算出多个车道各自的行驶车道分数。控制器140算出多个车道各自的行驶车道分数之和。
[0136]
驾驶者辅助装置100识别是否确定车辆1的行驶车道(1020)。
[0137]
当识别为车辆1正在行驶的车道的可靠度高时,控制器140可确定车辆1的行驶车道。控制器140识别是否将之前识别的车道确定为车辆1的行驶车道。
[0138]
当确定车辆1的行驶车道时(1020的是),驾驶者辅助装置100识别具备最大行驶车道分数的车道是否为一个(1030)。
[0139]
如上所述,控制器140算出多个车道各自的行驶车道分数之和。
[0140]
此时,根据车辆1的周边对象物,多个车道可表示最大行驶车道分数。例如,在不存在车辆1的周边对象物时,所有车道的行驶车道分数可相同。在这样的情况下,具备最大行驶车道分数的车道可能是多个。
[0141]
具备最大行驶车道分数的车道为一个时(1030的是),驾驶者辅助装置100使车道识别的可靠度上升(1040)。
[0142]
控制器140可按增量来增加车道识别的可靠度值。
[0143]
当具备最大行驶车道分数的车道不是一个时(1030的否),驾驶者辅助装置100使车道识别的可靠度下降(1045)。
[0144]
控制器140可按增量来减小车道识别的可靠度值。
[0145]
驾驶者辅助装置100识别可靠度是否为基准值以上(1050)。
[0146]
控制器140将通过动作1040或动作1045而得到的可靠度值与基准值进行比较,并识别可靠度值是否为基准值以上。
[0147]
当可靠度为基准值以上时(1050的是),驾驶者辅助装置100确定车辆1的行驶车道(1060)。
[0148]
控制器140将车辆1的行驶车道确定为基于行驶车道分数的车道。
[0149]
当可靠度不是基准值以上时(1050的否),驾驶者辅助装置100不确定车辆1的行驶车道(1065)。
[0150]
控制器140可以不确定车辆1的行驶车道。
[0151]
当未确定车辆1的行驶车道时(1020的否),驾驶者辅助装置100识别具备最大行驶车道分数的车道是否为一个(1035)。
[0152]
动作1035与上述说明的动作1030相同。
[0153]
当具备最大行驶车道分数的车道为一个时(1035的是),驾驶者辅助装置100使车道识别的可靠度上升(1070)。
[0154]
控制器140可按增量来增加车道识别的可靠度值。
[0155]
具备最大行驶车道分数的车道不是一个时(1035的否),驾驶者辅助装置100重置车道识别的可靠度(1075)。
[0156]
控制器140将车道识别的可靠度值重置为“0”。
[0157]
驾驶者辅助装置100识别可靠度是否为基准值以上(1080)。
[0158]
控制器140将通过动作1070或动作1075而获得的可靠度值与基准值进行比较,并识别可靠度值是否为基准值以上。
[0159]
当可靠度为基准值以上时(1080的是),驾驶者辅助装置100确定车辆1的行驶车道(1090)。
[0160]
控制器140将车辆1的行驶车道确定为基于行驶车道分数的车道。
[0161]
当可靠度不是基准值以上时(1080的否),驾驶者辅助装置100不确定车辆1的行驶车道(1095)。
[0162]
控制器140可以不确定车辆1的行驶车道。
[0163]
如以上所说明,驾驶者辅助装置100评价基于行驶车道分数而识别的车道,并基于评价结果而确定车辆1正在行驶的车道。
[0164]
驾驶者辅助装置100追踪车辆1行驶的车道。
[0165]
驾驶者辅助装置100基于对影像数据进行处理的情况而识别车道的变更。例如,控制器140基于对影像数据进行处理的情况而识别车道的车道线。控制器140以车辆1的中心线为基准识别左侧车道线的坐标及右侧车道线的坐标。当前左侧车道线的坐标和之前左侧车道线的坐标之差为正的阈值以上,且当前右侧车道线的坐标和之前右侧车道线的坐标之差为正的阈值以上时,控制器140可识别为将车道变更为左侧车道。当前左侧车道线的坐标和之前左侧车道线的坐标之差为负的阈值以下且当前右侧车道线的坐标和之前右侧车道线的坐标之差为负的阈值以下时,控制器140可识别为将车道变更为右侧车道。
[0166]
驾驶者辅助装置100可基于车辆1的车道变更而变更车辆1行驶的车道的序号。例如,控制器140基于车辆1将车道变更为左侧车道的情况,将车道的序号减小“1”。另外,控制器140基于车辆1将车道变更为右侧车道的情况,将车道的序号增加“1”。
[0167]
驾驶者辅助装置100基于道路的车道分支的情况而变更车辆1行驶的车道的序号。例如,控制器140基于道路的车道分支的情况,基于存储的车道序号和分支之前的道路的车道的数量之差而识别在分支路上车辆1行驶的车道的序号。
[0168]
另外,驾驶者辅助装置100可基于道路的车道汇合的情况而变更车辆1行驶的车道的序号。例如,控制器140基于道路的车道汇合的情况,基于存储的车道序号和新道路的车道的数量之和而识别在分支路上车辆1行驶的车道的序号。
[0169]
图6示出一个实施例的驾驶者辅助装置将车辆引导至道路的出口路的方法的一例。图7示出一个实施例的驾驶者辅助装置为了变更车辆的车道而生成的路径的一例。图8示出一个实施例的驾驶者辅助装置为了变更车辆的车道而生成的路径的一例。
[0170]
参照图6、图7及图8,对驾驶者辅助装置100将车辆1引导至道路的出口路的方法(1100)进行说明。
[0171]
驾驶者辅助装置100获得影像数据及感测数据(1110)。
[0172]
控制器140从摄像头110获得影像数据,并从雷达120获得感测数据。控制器140基于对影像数据及/或感测数据进行处理的情况而获得包括车辆1的周边对象物的相对位置及/或相对速度在内的与周边对象物相关的信息。另外,控制器140基于对影像数据及/或感测数据进行处理的情况而获得与车辆1行驶的道路的车道线相关的信息。
[0173]
驾驶者辅助装置100获得地图数据(1120)。
[0174]
控制器140从导航装置10获得地图数据或从车辆1的外部装置获得地图数据。地图数据例如包括用于引导到目的地为止的路径的导航装置10的导航地图或用于自主行驶到目的地为止的高精密地图(hd map)。
[0175]
控制器140基于地图数据而识别车辆1行驶的道路。另外,控制器140基于地图数据而识别车辆1行驶的道路的车道的数量。
[0176]
驾驶者辅助装置100识别用于驶离道路的追加车道er1的起始位置和车辆1之间的距离是否为第一基准距离d1以下(1140)。
[0177]
控制器140基于从导航装置10获得的到目的地为止的路径而识别车辆1驶离当前正在行驶的道路的情况。另外,控制器140基于地图数据而识别用于车辆1驶离当前正在行驶的道路的出口路er2的位置及用于车辆1驶入出口路er2的追加车道er1的起始位置。
[0178]
控制器140基于车辆1的位置及用于驶入出口路er2的追加车道er1的起始位置而识别用于驶入出口路er2的追加车道er1的起始位置与车辆1之间的距离。另外,控制器140识别用于驶入出口路er2的追加车道er1的起始位置与车辆1之间的距离是否为第一基准距离d1以下。
[0179]
在此,第一基准距离d1是为了安全地驶入出口路er2而通过实验或经验来设定的。第一基准距离d1通过驾驶者来设定。
[0180]
第一基准距离d1基于车辆1行驶的道路的车道的数量及车辆1行驶的车道而发生变化。为了驶入出口路er2而所需的车道变更的次数越增加(例如,车道的数量多且车辆1在第一车道或第二车道等行驶时),第一基准距离d1越增加。
[0181]
另外,第一基准距离d1基于车辆1的行驶速度而发生变化。例如,车辆1的行驶速度越快,第一基准距离d1越增加。
[0182]
当用于驶入出口路er2的追加车道er1的起始位置与车辆1之间的距离不是第一基准距离d1以下时(1140的否),驾驶者辅助装置100控制车辆1保持车道(1145)。
[0183]
用于驶入出口路er2的追加车道er1的起始位置与车辆1之间的距离大于第一基准距离d1时,可能无需进行用于驶入出口路er2的准备。因此,控制器140控制驱动装置20、制动装置30或转向装置40,以使车辆1保持车道。
[0184]
当用于驶入出口路er2的追加车道er1的起始位置与车辆1之间的距离为第一基准距离d1以下时(1140的是),驾驶者辅助装置100识别车辆1行驶的车道是否为道路的最后车道(或第一车道)(1150)。
[0185]
当用于驶入出口路er2的追加车道er1的起始位置与车辆1之间的距离为第一基准距离d1以下时,控制器140识别为了驶离道路而是否需要变更车道。
[0186]
在出口路位于最后车道的外侧的情况下,控制器140识别车辆1行驶的车道是否为道路的最后车道。另外,出口路位于第一个车道的内侧的情况下,控制器140识别车辆1行驶
的车道是否为道路的第一车道。
[0187]
当车辆1行驶的车道不是道路的最后车道(或第一车道)(1150的否)时,驾驶者辅助装置100向驾驶者推荐车道变更或自动执行车道变更(1155)。
[0188]
当车辆1行驶的车道不是道路的最后车道(或第一车道)时,要求进行车道变更,以驶入道路的出口路er2。例如,如图7所示,用于驶入出口路er2的追加车道er1的起始位置与车辆1之间的距为第一基准距离d1以下且车辆1正在第一车道上行驶时需要进行车道变更,以通过位于第二车道的外侧的出口路er2而驶离道路。
[0189]
控制器140例如在车辆1的显示器显示用于向驾驶者推荐车道变更的影像消息或通过车辆1的扬声器而输出用于向驾驶者推荐车道变更的语音消息。
[0190]
另外,控制器140控制驱动装置20、制动装置30及/或转向装置40,以尝试自动变更车道。
[0191]
车辆1变更车道的结果,车辆1在道路的最后车道(或第一车道)上行驶。
[0192]
车辆1行驶的车道为道路的最后车道(或第一车道)时(1150的是),驾驶者辅助装置100识别道路的出口路er2与车辆1之间的距离是否为第二基准距离d2以下(1160)。
[0193]
控制器140基于地图数据而识别用于车辆1驶离当前正在行驶的道路的出口路er2的位置。
[0194]
控制器140基于出口路er2的位置而识别道路的出口路er2与车辆1之间的距离。另外,控制器140识别道路的出口路er2与车辆1之间的距离是否为第二基准距离d2以下。
[0195]
在此,第二基准距离d2例如与用于驶入出口路er2的追加车道er1的长度大致相同。
[0196]
出口路er2的位置与车辆1之间的距离不是第二基准距离d2以下时(1160的否),驾驶者辅助装置100对车辆1进行控制,以使车辆为了驶离道路而保持车速并保持车道(1165)。
[0197]
当出口路er2的位置与车辆1之间的距离大于第二基准距离d2时,车辆1无法驶入用于驶入出口路er2的追加车道er1。因此,控制器140控制驱动装置20、制动装置30或转向装置40,以使车辆1为了驶离道路而保持车速并保持车道。
[0198]
当出口路er2的位置与车辆1之间的距离为第二基准距离d2以下时(1160的是),驾驶者辅助装置100向驾驶者推荐车道变更或自动执行车道变更(1170)。
[0199]
当出口路er2的位置与车辆1之间的距离为第二基准距离d2以下时,车辆1可驶入用于驶入出口路er2的追加车道er1。例如,如图8所示,当车辆1在道路的最后车道上行驶且通过了用于驶入出口路er2的追加车道er1的起始位置时,车辆1需要将车道变更为用于驶入出口路er2的追加车道er1。
[0200]
控制器140例如在车辆1的显示器显示用于向驾驶者推荐车道变更的影像消息或通过车辆1的扬声器而输出向驾驶者推荐车道变更的语音消息。
[0201]
另外,控制器140控制驱动装置20、制动装置30及/或转向装置40,以尝试自动变更车道。
[0202]
变更车辆1的车道的结果,车辆1可在用于驶入出口路er2的追加车道er1上行驶。另外,车辆1通过出口路er2而可驶离道路。
[0203]
如以上所说明,驾驶者辅助装置100识别车辆1正在行驶的车道,并基于车辆1正在
行驶的车道而向驾驶者推荐用于驶离道路的车道变更。
[0204]
由此,驾驶者操作车辆1,以在适当的时机变更车道而驶离道路。
[0205]
另一方面,公开的实施例可由存储有通过计算机而可执行的指令的记录介质的形态来实现。指令以程序代码的形态被存储,在通过处理器执行时,生成程序模块而执行公开的实施例的动作。记录介质可由计算机可读取的记录介质实现。
[0206]
作为计算机可读取的记录介质,包括存储有由计算机可解读的指令的所有种类的记录介质。例如,具有rom(read only memory:只读存储器)、ram(random access memory:随机存取存储器)、磁带、磁盘、闪存、光数据存储装置等。
[0207]
通过机器可读取的存储介质可由非暂时性(non-transitory)存储介质的形态提供。在此,
‘
非暂时性存储介质’是实际存在(tangible)的装置,只是表示不包括信号(signal)(例如:电磁波),该用语不区分将数据半永久性地存储到存储介质的情况和临时存储的情况。例如,
‘
非暂时性存储介质’包括临时存储数据的缓冲器。
[0208]
以上,参照附图,对公开的实施例进行了说明。本领域的技术人员在不变更本发明的技术思想或必要特征的情况下,可以与公开的实施例不同的形态来实施本发明。公开的实施例仅为例示,本发明不限于此。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1