一种标定方法和装置与流程
本技术实施例涉及标定,并且更具体地,涉及一种标定方法和装置。
背景技术:
1、车辆座舱不同的特性或者功能建立在不同坐标系下。如果不同坐标系下的设备之间需要进行交互,那就需要进行标定。例如,座舱内的视觉感知特性(如摄像头采集的图像数据)建立在相机坐标系下,而车内其他设备(例如抬头显示装置)是依赖整车坐标系。考虑到视觉和其他感知之间的多模态融合,建立相机坐标系与整车坐标系的转换关系则非常必要。为了建立二者关系,则需要进行标定。当前在对车辆中设备标定的过程中需要人工参与标定过程,标定过程不智能,导致标定效率较低。
技术实现思路
1、本技术实施例提供一种标定方法和装置,有助于提升对车辆中的待标定设备标定时的智能化程度,从而有助于提升标定效率。
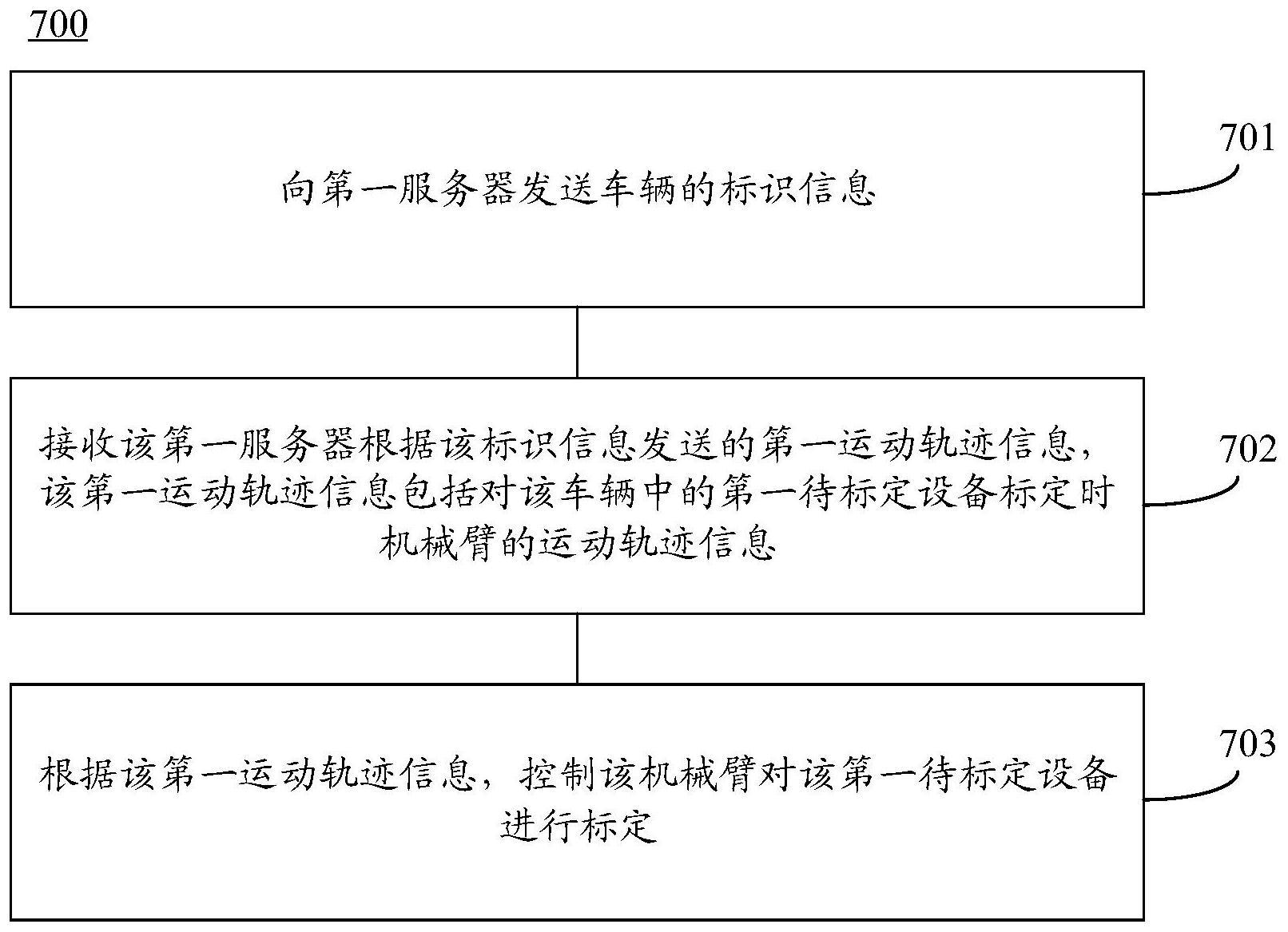
2、第一方面,提供了一种标定方法,该方法包括:向第一服务器发送车辆的标识信息;接收该第一服务器根据该标识信息发送的第一运动轨迹信息,该第一运动轨迹信息包括对该车辆中的第一待标定设备标定时机械臂的运动轨迹信息;根据该第一运动轨迹信息,控制该机械臂对该第一待标定设备进行标定。
3、本技术实施例中,在标定装置(例如,工控机)对车辆中的第一待标定设备标定时,可以向第一服务器发送车辆的标识信息并根据第一服务器发送的第一运动轨迹信息,控制机械臂对第一待标定设备进行标定。从而代替了通过人工多次摆放和尝试来获取机械臂的运动轨迹的方式,使得机械臂自动快速运动到目标位置,有助于节省人力和试错成本,提升设备标定时的智能化程度,从而有助于提升标定效率。
4、在一些可能的实现方式中,向第一服务器发送车辆的标识信息,包括:向第一服务器发送该车辆的标识信息和该第一待标定设备的标识信息。
5、在一些可能的实现方式中,向第一服务器发送车辆的标识信息,包括:通过该车辆向该第一服务器发送该标识信息。
6、在一些可能的实现方式中,该标定装置可以向车辆发送该标识信息。车辆在接收到该标识信息后可以向该第一服务器发送该标识信息以及第一待标定设备的标识信息。第一服务器在接收到该车辆的标识信息以及第一待标定设备的标识信息后,可以向车辆发送第一运动轨迹信息,从而车辆可以向该标定装置发送该第一运动轨迹信息。
7、在一些可能的实现方式中,该第一运动轨迹信息中可以包括针对该车辆中多个待标定设备中每个待标定设备标定时机械臂的运动轨迹信息。这样,在标定装置完成对第一待标定设备的标定后,可以继续根据第一运动轨迹信息对其他待标定设备进行标定。
8、在一些可能的实现方式中,该第一服务器可以是实体服务器,也可以是虚拟服务器。
9、结合第一方面,在第一方面的某些实现方式中,该方法还包括:在该第一待标定设备标定完成时,接收该第一服务器发送的第二运动轨迹信息,该第二运动轨迹信息包括对该车辆中的第二待标定设备标定时该机械臂的运动轨迹信息;根据该第二运动轨迹信息,控制该机械臂对该第二待标定设备进行标定。
10、本技术实施例中,在标定装置完成对第一待标定设备的标定时,可以根据第一服务器发送的第二运动轨迹信息,控制机械臂对第二待标定设备进行标定。这样,在对第一待标定设备标定完成时无需人工进行控制或者通过人工操作切换至进行第二待标定设备的标定,有助于节省人力成本,提升设备标定时的智能化程度,从而有助于提升标定效率。
11、在一些可能的实现方式中,在该第一待标定设备标定完成时,接收该第一服务器发送的第二运动轨迹信息,包括:在该第一待标定设备标定完成时,向该第一服务器发送该车辆的标识信息和该第二待标定设备的标识信息;接收该第一服务器根据该车辆的标识信息和该第二待标定设备的标识信息发送的第二运动轨迹信息。
12、在一些可能的实现方式中,在标定装置完成对第一待标定设备的标定时,标定装置可以向车辆发送该标识信息,车辆在接收到该标识信息后可以向该第一服务器发送该标识信息以及第二待标定设备的标识信息。第一服务器在接收到该车辆的标识信息以及第二待标定设备的标识信息后,可以向车辆发送该第二运动轨迹信息。从而车辆可以向该标定装置发送该第二运动轨迹信息。
13、结合第一方面,在第一方面的某些实现方式中,该方法还包括:控制该车辆行驶至第一工位,该第一工位为对该第一待标定设备进行标定的工位。
14、本技术实施例中,不同的工位也可以理解为不同的位置,在同一个工位可以设置有多个不同的标定装置,也可以在不同的工位设置有多个不同的标定装置或多个相同的标定装置,本技术对此不做限定。标定装置可以利用车辆的自动驾驶能力,控制车辆行驶至第一工位,从而无需人工驾驶车辆行驶至第一工位,有助于节省人力和时间成本,提升设备标定时的智能化程度,从而有助于提升标定效率。
15、在一些可能的实现方式中,该标定装置可以为车辆规划从车辆当前位置至第一工位的行驶轨迹信息。标定装置可以将该行使轨迹信息发送给车辆,从而使得车辆根据该行驶轨迹信息从当前位置行驶至该第一工位。
16、结合第一方面,在第一方面的某些实现方式中,该方法还包括:向第二服务器发送多个待标定设备的信息,该多个待标定设备包括该第一待标定设备;接收该第二服务器发送的行驶轨迹信息,该行驶轨迹信息包括该车辆在多个工位间行驶的轨迹信息,该多个工位包括该第一工位;其中,该控制该车辆行驶至第一工位,包括:根据该行驶轨迹信息,控制该车辆行驶至该第一工位。
17、本技术实施例中,当车辆中存在多个待标定设备且该多个待标定设备需要在不同的工位上完成标定时,标定装置可以向第二服务器发送多个待标定设备的信息。从而第二服务器可以利用路径规划算法,自动规划多个待标定设备标定的先后顺序以及车辆在各个工位间行使时的运动轨迹。无需人工进行任务规划,有助于节省人力成本;同时,提升了车辆在多个工位间运行时的效率,从而有助于提升标定效率。
18、在一些可能的实现方式中,该行驶轨迹信息包括该车辆在多个工位间行驶距离最短的轨迹信息。进而可以提高车辆标定速度,提高标定效率。
19、在一些可能的实现方式中,该行驶轨迹信息包括该车辆在多个工位间行驶冲突最少的轨迹信息。进而可以降低多车辆标定过程中的行驶路线和标定路线冲突,提高系统运行效率。
20、在一些可能的实现方式中,该多个工位中包括第二工位,该第二工位为对该第二待标定设备进行标定的工位,该方法还包括:根据该行驶轨迹信息,确定第一待标定设备的下一个待标定设备为第二待标定设备;在第一待标定设备标定完成时,控制车辆从该第一工位行驶至第二工位。
21、在一些可能的实现方式中,该第二服务器和该第一服务器可以是同一服务器,或者,也可以不同的服务器。
22、在一些可能的实现方式中,该第二服务器可以是实体服务器,也可以是虚拟服务器。
23、结合第一方面,在第一方面的某些实现方式中,该第一待标定设备包括摄像装置、抬头显示装置或者雷达。
24、结合第一方面,在第一方面的某些实现方式中,该方法还包括:在对该第一待标定设备标定的过程中发生异常时,处理该异常。
25、本技术实施例中,在对第一待标定设备标定的过程中发生异常时,标定装置可以自动处理该异常。这样,在发生异常时无需人工解决,标定装置可以自动解决异常,有助于节省人力成本;同时,有助于提升设备标定时的智能化程度,从而有助于提升标定效率。
26、结合第一方面,在第一方面的某些实现方式中,该第一待标定设备为摄像装置,该机械臂的末端设置有标定板,该摄像装置在该机械臂处于第一标定位置时采集的图像信息为第一图像信息,该第一运动轨迹信息包括该第一标定位置,该在对该第一待标定设备标定的过程中发生异常时,处理该异常,包括:在该第一图像信息未包括完整的该标定板的图像时,接收该车辆发送的该标定板的偏移量;根据该偏移量,控制该机械臂从该第一标定位置调整至第二标定位置。
27、本技术实施例中,在对摄像装置进行标定的过程中,若摄像装置未采集到完整的标定板的图像,那么车辆可以计算机械臂的偏移量并将该偏移量发送给标定装置。标定装置可以根据该偏移量,将机械臂从第一标定位置调整至第二标定位置。这样,摄像装置可以在机械臂处于第二标定位置时采集到完整的标定板的图像。从而使得标定装置自动解决标定摄像装置时产生的异常,无需人工解决异常,有助于提升设备标定时的智能化程度,从而有助于提升标定效率。
28、结合第一方面,在第一方面的某些实现方式中,该第一待标定设备为抬头显示装置,该机械臂的末端设置有相机,该相机在第三标定位置采集的图像信息为第二图像信息,该第一运动轨迹信息包括该第三标定位置,该在对该第一待标定设备标定的过程中发生异常时,处理该异常,包括:在该第二图像信息中未包括完整的该抬头显示装置显示的图像时,根据该第二图像信息,控制该机械臂从该第三标定位置调整至第四标定位置。
29、本技术实施例中,在对抬头显示装置进行标定的过程中,若机械臂末端的相机未采集到完整的抬头显示装置显示的图像,那么标定装置可以计算机械臂的偏移量并根据该偏移量,将机械臂从第三标定位置调整至第四标定位置。这样,相机可以在机械臂处于第四标定位置时采集到完整的抬头显示装置显示的图像。从而使得标定装置自动解决标定摄像装置时产生的异常,无需人工解决异常,有助于提升设备标定时的智能化程度,从而有助于提升标定效率。
30、结合第一方面,在第一方面的某些实现方式中,该方法还包括:在对该第一待标定设备进行标定之前,控制该机械臂运动到第一初始位置;获取该车辆的轮眉测量结果;根据该轮眉测量结果,控制该机械臂由该第一初始位置调整至第二初始位置。
31、本技术实施例中,在标定装置对第一待标定设备标定之前,可以控制机械臂运动到第一初始位置。在获取对轮眉的测量结果后可以控制机械臂从第一初始位置调整至第二初始位置。这样,无需通过人工摆放机械臂,有助于节省人力和试错成本,提升设备标定时的智能化程度,从而有助于提升标定效率。
32、结合第一方面,在第一方面的某些实现方式中,该方法还包括:在向该第一服务器发送该车辆的标识信息之前,向该车辆请求该标识信息;接收该车辆发送的该标识信息。
33、结合第一方面,在第一方面的某些实现方式中,该标识信息包括该车辆的车型信息。
34、第二方面,提供了一种标定方法,该方法包括:向第一服务器发送车辆的标识信息以及第一待标定设备的标识信息;接收该第一服务器发送的第一运动轨迹信息,该第一运动轨迹信息包括对第一待标定设备标定时机械臂的运动轨迹信息;向标定装置发送该第一运动轨迹信息。
35、结合第二方面,在第二方面的某些实现方式中,该方法还包括:在对第一待标定设备标定的过程中发生异常时,处理该异常。
36、结合第二方面,在第二方面的某些实现方式中,该机械臂的末端设置有标定板,该第一待标定设备为摄像装置,在对第一待标定设备标定的过程中发生异常时,处理该异常,包括:在该摄像装置启动失败时,重新启动该摄像装置。
37、结合第二方面,在第二方面的某些实现方式中,该机械臂的末端设置有标定板,该第一待标定设备为摄像装置,在对第一待标定设备标定的过程中发生异常时,处理该异常,包括:在该摄像装置采集的第一图像信息中未包括完整的标定板的图像时,则根据该第一图像信息,确定标定板的偏移量;向该标定装置发送该偏移量。
38、结合第二方面,在第二方面的某些实现方式中,该第一待标定设备为摄像装置,在对第一待标定设备标定的过程中发生异常时,处理该异常,包括:在标定误差不在预设误差范围内时,向标定装置发送指示信息,该指示信息用于指示标定装置重新对该第一待标定设备进行标定。
39、第三方面,提供了一种标定方法,该方法包括:向车辆发送标定信息,该标定信息用于对该车辆中的一个或者多个待标定设备进行标定;接收该车辆发送的对该一个或者多个待标定设备的标定结果。
40、本技术实施例中,标定装置可以向车辆发送用于标定一个或者多个待标定设备的标定信息并接收一个或者多个待标定设备的标定结果,从而可以实现对车辆中的一个或者多个待标定设备的标定,该过程无需人工参与,有助于节省人力和试错成本,提升设备标定时的智能化程度,从而有助于提升标定效率。
41、结合第三方面,在第三方面的某些实现方式中,该标定信息中包括一个或者多个工位的信息,该一个或者多个工位为对该一个或者多个待标定设备进行标定的工位。
42、本技术实施例中,该标定信息中可以携带一个或者多个工位的信息,这样可以使得车辆根据该一个或者多个工位的信息,控制车辆自动行驶至各个工位。从而无需人工驾驶车辆行驶至第一工位,有助于节省人力和时间成本,提升设备标定时的智能化程度,从而有助于提升标定效率。
43、结合第三方面,在第三方面的某些实现方式中,该标定信息包括该一个或者多个待标定设备的标识信息。
44、本技术实施例中,该标定信息中可以携带一个或者多个待标定设备的标识信息,这样车辆在接收到该一个或者多个待标定设备的标识信息后,执行相应的标定操作。例如,若标定信息中携带摄像装置的标识信息,那么车辆在接收到标定信息后可以控制摄像装置启动。
45、结合第三方面,在第三方面的某些实现方式中,该一个或者多个待标定设备包括摄像装置,该方法还包括:在对该摄像装置标定失败时,接收该车辆发送的指示信息,该指示信息用于指示重新对该摄像装置进行标定。
46、本技术实施例中,当对摄像装置标定失败后,车辆可以向标定装置发送指示信息,从而标定装置可以重新对摄像装置进行标定。这样,车辆和标定装置可以自动解决标定摄像装置时产生的异常,无需人工解决异常,有助于提升设备标定时的智能化程度,从而有助于提升标定效率。
47、结合第三方面,在第三方面的某些实现方式中,该方法还包括:向用户提示对该一个或者多个待标定设备的标定结果。
48、本技术实施例中,标定装置在接收到标定结果后还可以向用户提示该标定结果,从而使得用户获知对一个或者多个待标定设备的标定结果。
49、第四方面,提供了一种标定装置,该装置包括:发送单元,用于向第一服务器发送车辆的标识信息;接收单元,用于接收该第一服务器根据该标识信息发送的第一运动轨迹信息,该第一运动轨迹信息包括对该车辆中的第一待标定设备标定时机械臂的运动轨迹信息;控制单元,用于根据该第一运动轨迹信息,控制该机械臂对该第一待标定设备进行标定。
50、结合第四方面,在第四方面的某些实现方式中,该接收单元,还用于在该第一待标定设备标定完成时,接收该第一服务器发送的第二运动轨迹信息,该第二运动轨迹信息包括对该车辆中的第二待标定设备标定时该机械臂的运动轨迹信息;该控制单元,还用于根据该第二运动轨迹信息,控制该机械臂对该第二待标定设备进行标定。
51、结合第四方面,在第四方面的某些实现方式中,该控制单元,还用于控制该车辆行驶至第一工位,该第一工位为对该第一待标定设备进行标定的工位。
52、结合第四方面,在第四方面的某些实现方式中,该发送单元,还用于向第二服务器发送多个待标定设备的信息,该多个待标定设备包括该第一待标定设备;该接收单元,还用于接收该第二服务器发送的行驶轨迹信息,该行驶轨迹信息包括该车辆在多个工位间行驶的轨迹信息,该多个工位包括该第一工位;其中,该控制单元具体用于:根据该行驶轨迹信息,控制该车辆行驶至该第一工位。
53、结合第四方面,在第四方面的某些实现方式中,该第一待标定设备包括摄像装置、抬头显示装置或者雷达。
54、结合第四方面,在第四方面的某些实现方式中,该装置还包括:异常处理单元,用于在对该第一待标定设备标定的过程中发生异常时,处理该异常。
55、结合第四方面,在第四方面的某些实现方式中,该第一待标定设备为摄像装置,该机械臂的末端设置有标定板,该摄像装置在该机械臂处于第一标定位置时采集的图像信息为第一图像信息,该第一运动轨迹信息包括该第一标定位置,该接收单元,还用于在该第一图像信息未包括完整的该标定板的图像时,接收该车辆发送的该标定板的偏移量;该异常处理单元具体用于:根据该偏移量,控制该机械臂从该第一标定位置调整至第二标定位置。
56、结合第四方面,在第四方面的某些实现方式中,该第一待标定设备为抬头显示装置,该机械臂的末端设置有相机,该相机在第三标定位置采集的图像信息为第二图像信息,该第一运动轨迹信息包括该第三标定位置,该异常处理单元具体用于:在该第二图像信息中未包括完整的该抬头显示装置显示的图像时,根据该第二图像信息,控制该机械臂从该第三标定位置调整至第四标定位置。
57、结合第四方面,在第四方面的某些实现方式中,该装置还包括获取单元,该控制单元,还用于在对该第一待标定设备进行标定之前,控制该机械臂运动到第一初始位置;该获取单元,用于获取该车辆的轮眉测量结果;该控制单元,还用于根据该轮眉测量结果,控制该机械臂由该第一初始位置调整至第二初始位置。
58、结合第四方面,在第四方面的某些实现方式中,该发送单元,还用于在向该第一服务器发送该车辆的标识信息之前,向该车辆发送请求信息,该请求信息用于请求该标识信息;该接收单元,还用于接收该车辆发送的该标识信息。
59、结合第四方面,在第四方面的某些实现方式中,该标识信息包括该车辆的车型信息。
60、第五方面,提供了一种标定装置,该装置包括:发送单元,用于向第一服务器发送车辆的标识信息以及第一待标定设备的标识信息;接收单元,用于接收该第一服务器发送的第一运动轨迹信息,该第一运动轨迹信息包括对第一待标定设备标定时机械臂的运动轨迹信息;该发送单元,还用于向标定装置发送该第一运动轨迹信息。
61、结合第五方面,在第五方面的某些实现方式中,该装置还包括:异常处理单元,用于在对第一待标定设备标定的过程中发生异常时,处理该异常。
62、结合第五方面,在第五方面的某些实现方式中,该机械臂的末端设置有标定板,该第一待标定设备为摄像装置,该异常处理单元具体用于:在该摄像装置启动失败时,重新启动该摄像装置。
63、结合第五方面,在第五方面的某些实现方式中,该机械臂的末端设置有标定板,该第一待标定设备为摄像装置,该异常处理单元具体用于:在该摄像装置采集的第一图像信息中未包括完整的标定板的图像时,则根据该第一图像信息,确定机械臂的偏移量;该发送单元,还用于向该标定装置发送该偏移量。
64、结合第五方面,在第五方面的某些实现方式中,该第一待标定设备为摄像装置,该异常处理单元具体用于:根据标定结果,确定标定误差在不预设误差范围内;该发送单元,还用于向标定装置发送指示信息,该指示信息用于指示标定装置重新对该第一待标定设备进行标定。
65、第六方面,提供了一种标定装置,该装置包括:发送单元,用于向车辆发送标定消息,该标定消息用于对该车辆中的一个或者多个待标定设备进行标定;接收单元,用于接收该车辆发送的对该一个或者多个待标定设备的标定结果。
66、结合第六方面,在第六方面的某些实现方式中,该标定消息中包括一个或者多个工位的信息,该一个或者多个工位为对该一个或者多个待标定设备进行标定的工位。
67、结合第六方面,在第六方面的某些实现方式中,该标定消息包括该一个或者多个待标定设备的标识信息。
68、结合第六方面,在第六方面的某些实现方式中,该一个或者多个待标定设备包括摄像装置,该接收单元,还用于在对该摄像装置标定失败时,接收该车辆发送的指示信息,该指示信息用于指示重新对该摄像装置进行标定。
69、结合第六方面,在第六方面的某些实现方式中,该装置包括:提示单元,用于向用户提示对该一个或者多个待标定设备的标定结果。
70、第七方面,提供了一种装置,该装置包括:存储器,用于存储计算机指令;处理器,用于执行该存储器中存储的计算机指令,以使得该装置执行上述第一方面或者第三方面中的方法。
71、第八方面,提供了一种装置,该装置包括:存储器,用于存储计算机指令;处理器,用于执行该存储器中存储的计算机指令,以使得该装置执行上述第二方面中的方法。
72、第九方面,提供了一种工控机,该工控机包括上述第四方面、第六方面或者第七方面中任一项所述的装置。
73、第十方面,提供了一种车辆,该车辆包括上述第五方面或者第八方面中任一项所述的装置。
74、第十一方面,提供了一种计算机程序产品,所述计算机程序产品包括:计算机程序代码,当所述计算机程序代码在计算机上运行时,使得计算机执行上述第一方面或者第三方面中的方法。
75、第十二方面,提供了一种计算机程序产品,所述计算机程序产品包括:计算机程序代码,当所述计算机程序代码在计算机上运行时,使得计算机执行上述第二方面中的方法。
76、上述计算机程序代码可以全部或者部分存储在第一存储介质上,其中第一存储介质可以与处理器封装在一起的,也可以与处理器单独封装,本技术实施例对此不作具体限定。
77、第十三方面,提供了一种计算机可读介质,所述计算机可读介质存储有程序代码,当所述计算机程序代码在计算机上运行时,使得计算机执行上述第一方面或者第三方面中的方法。
78、第十四方面,提供了一种计算机可读介质,所述计算机可读介质存储有程序代码,当所述计算机程序代码在计算机上运行时,使得计算机执行上述第二方面中的方法。
79、第十五方面,本技术实施例提供了一种芯片系统,该芯片系统包括处理器,用于调用存储器中存储的计算机程序或计算机指令,以使得该处理器执行上述第一方面或者第三方面所述的方法。
80、结合第十五方面,在一种可能的实现方式中,该处理器通过接口与存储器耦合。
81、结合第十五方面,在一种可能的实现方式中,该芯片系统还包括存储器,该存储器中存储有计算机程序或计算机指令。
82、第十六方面,本技术实施例提供了一种芯片系统,该芯片系统包括处理器,用于调用存储器中存储的计算机程序或计算机指令,以使得该处理器执行上述第二方面所述的方法。
83、结合第十六方面,在一种可能的实现方式中,该处理器通过接口与存储器耦合。
84、结合第十六方面,在一种可能的实现方式中,该芯片系统还包括存储器,该存储器中存储有计算机程序或计算机指令。
85、本技术实施例中,在标定装置(例如,工控机)对车辆中的第一待标定设备标定时,可以向第一服务器发送车辆的标识信息并根据第一服务器发送的第一运动轨迹信息,控制机械臂对第一待标定设备进行标定。从而代替了通过人工多次摆放尝试来获取机械臂路径的方式,使得机械臂自动快速运动到目标位置,有助于节省人力和试错成本,提升设备标定时的智能化程度,从而有助于提升标定效率。
86、在对第一待标定设备标定完成时,接收第一服务器发送的第二运动轨迹信息,从而根据第二运动轨迹信息对第二待标定进行标定。无需人工进行控制或者通过人工操作切换至进行第二待标定设备的标定。
87、利用车辆的自动驾驶能力,控制车辆行驶至第一工位,从而无需人工驾驶车辆行驶至第一工位,有助于节省人力和时间成本,提升设备标定时的智能化程度,从而有助于提升标定效率。
88、通过第二服务器自动规划的多个待标定设备标定的先后顺序以及车辆在各个工位间行使时的运动轨迹,标定设备可以控制车辆在多个工位间切换,无需人工进行任务规划,有助于节省人力成本;同时,提升了车辆在多个工位间运行时的效率,从而有助于提升标定效率。
89、在对待标定设备标定的过程中发生异常时,可以自动处理该异常。这样,在发生异常时无需人工解决,标定装置可以自动解决异常,有助于提升设备标定时的智能化程度,从而有助于提升标定效率。
- 还没有人留言评论。精彩留言会获得点赞!