一种隔振浮驱一体式磁悬浮轨道小车
1.本发明涉及一种磁悬浮运输技术,尤其涉及一种隔振浮驱一体式磁悬浮轨道小车。
背景技术:
2.超洁净运输是芯片加工、生物制药、药品配送等领域的关键环节。芯片加工厂采用自动传动带进行运输,只能进行同层运输、路线更改困难,且机械传送带转动存在摩擦,亦产生固体多余物,易污染高端芯片加工制造环境。现有无菌无尘制药车间常采用“机械轮轨+无菌小车”实现物料运输,因导轨与滚轮之间长期存在摩擦磨损,产生固体多余物,存在药物安全性隐患。大型医院采用的空中机械轮轨实现药房与病房间的药物配送,配送效率高,但轨道同样存在固体多余物,污染药品。此外,机械轨道工作时噪声大,影响中/重症病房病人休息和急救抢救室手术。
3.为消除机械轮轨的固体多余物和工作噪声,采用悬浮技术实现小车与轨道间的非接触悬浮支撑。常用的悬浮方式包括气浮、液浮和磁浮三种方式。气浮轨道需在轨道上铺设气路和安装气泵,加大了系统的复杂性,同时高压气体极易搅动吹起空气中悬浮颗粒,降低了工作环境洁净度。液浮轨道利用液体油膜实现小车与轨道间的悬浮支撑,悬浮力大,但悬浮阻尼也大,且刚度和阻尼不可控,限制了小车运行速度,同时工作时液体易挥发,污染配送物品。磁悬浮轨道利用磁场产生的悬浮力实现支撑运行,具有运行速度快,运行平稳,无噪音,不产生固体多余物的优点,且支撑刚度和支撑阻尼均可控,是新一代智慧传输配送系统的理想支撑方式。
4.现有的磁浮轨道分为电磁悬浮和永磁悬浮两种类型。前者通过控制车体上电磁铁对轨道导磁体的电磁吸力实现悬浮,悬浮能耗高,需要主动控制。后者利用车体下端永磁体与轨道上端永磁体间的同性磁极产生的斥力实现悬浮,具有结构简单,体积较小,悬浮不耗电,运维成本低等优点。
5.中国专利202010881971.7所述的磁悬浮物流运输装置,通过电磁铁间的吸力实现五自由度非接触悬浮,借助承重电磁轴承实现轴向悬浮以及翻滚和俯仰两自由度的偏转悬浮,利用水平电磁轴承实现车体左右晃动以及偏航悬浮,采用直线电机实现磁悬浮主体沿轨道运行。该方案通过电磁铁实现五自由度非接触主动悬浮,消除了固体多余物和机械噪音,非常适用于无菌无尘制药车间、高端芯片制造车间、大型医院等场合,但利用电磁铁实现主动悬浮,存在电磁干扰且能耗较高。此外,该方案悬浮与驱动分离,需单独铺设驱动轨道和悬浮轨道,磁场利用率较低,增加了轨道成本。
6.中国专利202210434320.2所述的被动磁悬浮轨道小车,利用永磁体间的斥力实现五自由度被动悬浮,通过轨道斜侧面上的永磁导轨与车体支架下侧面的永磁体之间在竖直方向产生悬浮斥力,实现车体在轨道中心位置承重方向的平动悬浮以及在俯仰、翻滚两自由度上的偏转悬浮,借助轨道斜侧面上的永磁导轨与车体支架下侧面的永磁体之间在水平方向产生悬浮斥力,实现车体在左右移动单自由度平动悬浮和偏航单自由度偏转悬浮。该
方案利用永磁体实现五自由度非接触支撑,悬浮不耗电,但悬浮与驱动分离,磁场利用率较低。
7.中国专利202210504459.x所述的浮驱一体磁悬浮曲线运动轨道小车,借助电机动子和小车永磁体共用轨道上的永磁导轨实现浮驱一体,利用轨道永磁体和车体永磁体的斥力的竖直分量实现承重方向悬浮和俯仰、翻滚两自由度偏转悬浮,利用轨道永磁体和车体永磁体的斥力的水平分量实现车体在左右平动和偏航两自由度的悬浮。该方案驱动电机与悬浮永磁体共用一个磁场,实现悬浮和驱动的融合,提高了磁场利用率,但当增加负载变化或受到外界干扰时,车体会出现大幅振动或失稳,影响小车高性能传输。
8.有鉴于此,特提出本发明。
技术实现要素:
9.本发明的目的是克服现有技术的不足,提出一种隔振浮驱一体式磁悬浮轨道小车,以解决现有技术中存在的上述技术问题。可根据负载变化量和干扰大小,利用通电阻尼线圈产生所需的隔振电磁悬浮阻尼力,实现小车振动控制和振动抑制,采用电机动子与悬浮永磁体共用永磁导轨,实现浮驱一体,提高了磁场利用率,降低了轨道成本,具有抗干扰能力强、悬浮稳定好的优点,特别适用于洁净、超静的工作环境。
10.本发明的目的是通过以下技术方案实现的:
11.本发明的隔振浮驱一体式磁悬浮轨道小车,主要由轨道系统、小车系统和载物箱三部分组成,轨道系统主要包括:左导轨支撑板、右导轨支撑板、左悬浮驱动永磁导轨、右悬浮驱动永磁导轨、左导轨侧板、右导轨侧板、左导向磁轨、右导向磁轨、密封盖和吊装支架组件;小车系统包括:前车体支架组件、后车体支架组件、支架连接板组件、电机连接板、左电机动子、右电机动子、锂电池;载物箱;左导轨支撑板和右导轨支撑板位于左悬浮驱动永磁导轨、右悬浮驱动永磁导轨、左导轨侧板、右导轨侧板、左导向磁轨、右导向磁轨和密封盖的下方,左悬浮驱动永磁导轨和右悬浮驱动永磁导轨分别位于左导轨支撑板和右导轨支撑板的上方,并通过紧固螺钉安装在左导轨支撑板和右导轨支撑板上,左导轨侧板位于左导轨支撑板和左悬浮驱动永磁导轨左侧,并通过紧固螺钉安装在左导轨支撑板上,右导轨侧板位于右导轨支撑板和右悬浮驱动永磁导轨右侧,并通过紧固螺钉安装在右导轨支撑板上,左导向磁轨和右导向磁轨分别位于左导轨侧板和右导轨侧板的内侧,并通过紧固螺钉固定在左导轨侧板和右导轨侧板的内壁上,密封盖位于左导轨侧板、右导轨侧板、左导向磁轨和右导向磁轨上方,并通过紧固螺钉固定导轨侧板和右导轨侧板上,吊装支架组件位于左导轨支撑板、右导轨支撑板、左悬浮驱动永磁导轨、右悬浮驱动永磁导轨、左导轨侧板、右导轨侧板、左导向磁轨、右导向磁轨和密封盖的外侧,并通过紧固螺钉固定在左导轨支撑板和右导轨支撑板上,前车体支架组件和后车体支架组件位于左导轨支撑板、右导轨支撑板、左悬浮驱动永磁导轨和右悬浮驱动永磁导轨上方,前车体支架组件位于后车体支架组件的右侧,前车体支架组件和后车体支架组件位于左导轨侧板和右导轨侧板的中间位置,前车体支架组件和后车体支架组件位于左导向磁轨和右导向磁轨的中间位置,前车体支架组件和后车体支架组件位于密封盖的下方,前自润滑关节轴承和后自润滑关节轴承分别位于前车体支架组件和后车体支架组件的中心圆孔内,并通过紧固螺钉固定在前车体支架组件和后车体支架组件上,支架连接板组件位于左悬浮驱动永磁导轨和右悬浮驱动永磁导轨的中间
或“y”的情况也包括“x和y”的三种情况。
26.术语“包括”、“包含”、“含有”、“具有”或其它类似语义的描述,应被解释为非排它性的包括。例如:包括某技术特征要素(如原料、组分、成分、载体、剂型、材料、尺寸、零件、部件、机构、装置、步骤、工序、方法、反应条件、加工条件、参数、算法、信号、数据、产品或制品等),应被解释为不仅包括明确列出的某技术特征要素,还可以包括未明确列出的本领域公知的其它技术特征要素。
27.术语“由
……
组成”表示排除任何未明确列出的技术特征要素。若将该术语用于权利要求中,则该术语将使权利要求成为封闭式,使其不包含除明确列出的技术特征要素以外的技术特征要素,但与其相关的常规杂质除外。如果该术语只是出现在权利要求的某子句中,那么其仅限定在该子句中明确列出的要素,其他子句中所记载的要素并不被排除在整体权利要求之外。
28.除另有明确的规定或限定外,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如:可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本文中的具体含义。
29.术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化描述,而不是明示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本文的限制。
30.本发明实施例中未作详细描述的内容属于本领域专业技术人员公知的现有技术。本发明实施例中未注明具体条件者,按照本领域常规条件或制造商建议的条件进行。本发明实施例中所用试剂或仪器未注明生产厂商者,均为可以通过市售购买获得的常规产品。
31.本发明的隔振浮驱一体式磁悬浮轨道小车,主要由轨道系统、小车系统和载物箱三部分组成,轨道系统主要包括:左导轨支撑板、右导轨支撑板、左悬浮驱动永磁导轨、右悬浮驱动永磁导轨、左导轨侧板、右导轨侧板、左导向磁轨、右导向磁轨、密封盖和吊装支架组件;小车系统包括:前车体支架组件、后车体支架组件、支架连接板组件、电机连接板、左电机动子、右电机动子、锂电池;载物箱;左导轨支撑板和右导轨支撑板位于左悬浮驱动永磁导轨、右悬浮驱动永磁导轨、左导轨侧板、右导轨侧板、左导向磁轨、右导向磁轨和密封盖的下方,左悬浮驱动永磁导轨和右悬浮驱动永磁导轨分别位于左导轨支撑板和右导轨支撑板的上方,并通过紧固螺钉安装在左导轨支撑板和右导轨支撑板上,左导轨侧板位于左导轨支撑板和左悬浮驱动永磁导轨左侧,并通过紧固螺钉安装在左导轨支撑板上,右导轨侧板位于右导轨支撑板和右悬浮驱动永磁导轨右侧,并通过紧固螺钉安装在右导轨支撑板上,左导向磁轨和右导向磁轨分别位于左导轨侧板和右导轨侧板的内侧,并通过紧固螺钉固定在左导轨侧板和右导轨侧板的内壁上,密封盖位于左导轨侧板、右导轨侧板、左导向磁轨和右导向磁轨上方,并通过紧固螺钉固定导轨侧板和右导轨侧板上,吊装支架组件位于左导轨支撑板、右导轨支撑板、左悬浮驱动永磁导轨、右悬浮驱动永磁导轨、左导轨侧板、右导轨侧板、左导向磁轨、右导向磁轨和密封盖的外侧,并通过紧固螺钉固定在左导轨支撑板和右
导轨支撑板上,前车体支架组件和后车体支架组件位于左导轨支撑板、右导轨支撑板、左悬浮驱动永磁导轨和右悬浮驱动永磁导轨上方,前车体支架组件位于后车体支架组件的右侧,前车体支架组件和后车体支架组件位于左导轨侧板和右导轨侧板的中间位置,前车体支架组件和后车体支架组件位于左导向磁轨和右导向磁轨的中间位置,前车体支架组件和后车体支架组件位于密封盖的下方,前自润滑关节轴承和后自润滑关节轴承分别位于前车体支架组件和后车体支架组件的中心圆孔内,并通过紧固螺钉固定在前车体支架组件和后车体支架组件上,支架连接板组件位于左悬浮驱动永磁导轨和右悬浮驱动永磁导轨的中间位置,支架连接板组件位于前车体支架组件和后车体支架组件的下方,并通过前自润滑关节轴承和后自润滑关节轴承将前车体支架组件和后车体支架组件连接成一体,电机连接板位于前车体支架组件和后车体支架组件的中间位置,电机连接板位于支架连接板组件的上表面,并通过紧固螺钉安装在支架连接板组件上,左电机动子和右电机动子分别位于电机连接板下表面的左右两侧位置,并通过紧固螺钉固定在电机连接板上,锂电池位于电机连接板的上表面,并通过紧固螺钉安装在电机连接板上,载物箱位于左导轨支撑板、右导轨支撑板和支架连接板组件的下方,并通过转轴悬挂在支架连接板组件的下端,左悬浮驱动永磁导轨、右悬浮驱动永磁导轨的上端面和前车体支架组件、后车体支架组件的下端面留有一定的间隙,形成承重悬浮驱动气隙,左导向磁轨、右导向磁轨的侧面和前车体支架组件、后车体支架组件的侧面留有一定的间隙,形成导向悬浮气隙,左导轨侧板、右导轨侧板的内侧凹槽和前车体支架组件、后车体支架组件的保护滚轮之间留有一定的间隙,形成保护气隙。
32.所述的吊装支架组件主要有吊装板、左定距螺栓、右定距螺栓、支架、左连接板和右连接板。
33.所述的车体支架组件主要有车体支架、左前保护滚轮、左后保护滚轮、右前保护滚轮、右后保护滚轮、左前车体导向永磁体、左后车体导向永磁体、右前车体导向永磁体、右后车体导向永磁体、左导向阻尼线圈、右导向阻尼线圈、左前悬浮阻尼线圈、左后悬浮阻尼线圈、右前悬浮阻尼线圈、右后悬浮阻尼线圈、左承重悬浮永磁体、右承重悬浮永磁体、支撑轴、竖直位移传感器和水平位移传感器。
34.所述的车支架连接板组件主要有连接板、左滚珠轴承、右滚珠轴承和车体转轴。
35.所述的左导轨支撑板、右导轨支撑板、左导轨侧板、右导轨侧板、密封盖和吊装支架组件均由高碳钢、铝镍钴合金、钛钴合金、钡铁氧体中的一种材料制成。
36.所述的左悬浮驱动永磁导轨、右悬浮驱动永磁导轨、左导向磁轨、右导向磁轨、左前车体导向永磁体、左后车体导向永磁体、右前车体导向永磁体、右后车体导向永磁体、左承重悬浮永磁体和右承重悬浮永磁体的材料为衫钴合金或钕铁硼合金永磁材料。
37.所述的左悬浮驱动永磁导轨、右悬浮驱动永磁导轨、左承重悬浮永磁体和右承重悬浮永磁体沿磁极面法向方向充磁,充磁方向依次为:上n下s、上n下s、上s下n、上s下n或者上s下n、上s下n、上n下s、上n下s。
38.所述的左导向磁轨、右导向磁轨、左前车体导向永磁体、左后车体导向永磁体、右前车体导向永磁体和右后车体导向永磁体沿磁极面法向方向充磁,充磁方向依次为:左s右n、左n右s、左n右s、左n右s、左s右n、左s右n或者左n右s、左s右n、左s右n、左s右n、左n右s、左n右s。
39.所述的左前保护滚轮、左后保护滚轮、右前保护滚轮和右后保护滚轮为铝合金材料。
40.所述的竖直位移传感器和水平位移传感器均为电涡流位移传感器。
41.上述方案的原理是:
42.如图1a和1b所示,一种隔振浮驱一体式磁悬浮轨道小车工作时,通过给电机动子线圈通电,通电电机动子线圈在恒定交替的永磁磁场中产生驱动安培力,通过控制电机动子线圈电流大小和方向,使电机产生驱动力,驱使小车前行。利用轨道底面上的永磁导轨与车体支架下面的永磁体之间产生的悬浮斥力,实现车体在轨道中心位置承重方向和俯仰两自由度被动悬浮,借助轨道侧面上的导向磁轨与车体支架侧面的永磁体之间在产生的悬浮斥力,实现车体左右平动和偏航两自由度被动悬浮。通过自润滑关节轴承实现车体形态随轨道形状的自适应变化,完成小车平稳转向。一种隔振浮驱一体式磁悬浮轨道小车工作时包括转弯回正调整模式和负载回稳调整模式。转弯回正调整模式:当车体在轨道运行转弯时,车体因离心力出现倾斜,导致车体承重悬浮永磁体与悬浮驱动永磁导轨间的承重悬浮驱动气隙,以及车体导向永磁体与导向磁轨间的导向悬浮气隙发生改变,此时利用竖直位移传感器和水平位移传感器分别测量承重悬浮驱动气隙和导向悬浮气隙,并分别与承重悬浮驱动控制器和导向悬浮控制器中设定的初始值进行对比,当承重悬浮驱动气隙和导向悬浮气隙值发生变化,承重悬浮驱动控制器和导向悬浮控制器分别控制承重悬浮阻尼线圈和导向悬浮阻尼线圈产生励磁电流,当小车出现向外倾斜时,靠近轨道外侧的承重悬浮驱动气隙和导向悬浮气隙减小,承重悬浮阻尼线圈和导向悬浮阻尼线圈通过励磁电流产生的磁场分别与导向磁轨和悬浮驱动永磁导轨产生的磁场叠加,承重悬浮驱动气隙和导向悬浮气隙值增大,回到初始值,小车回正。负载回稳模式:当小车在平稳运行时,增加负载,承重悬浮驱动气隙减小,小车会产生晃动,竖直位移传感器测量承重悬浮驱动气隙,与承重悬浮驱动控制器中设定的初始值进行对比,当承重悬浮驱动气隙值发生变化,承重悬浮驱动控制器控制承重悬浮阻尼线圈产生励磁电流并通过励磁电流产生的磁场与悬浮驱动永磁导轨产生的磁场叠加,承重悬浮气隙回到初始值,小车重新回到稳定水平悬浮状态。
43.本发明与现有技术相比的优点在于:
44.本发明利用通电阻尼线圈产生电磁悬浮阻尼力实现小车振动控制和振动抑制,极大的提高抗干扰能力,通过电机动子与悬浮永磁体共用永磁导轨,实现浮驱一体,利用承重悬浮永磁体、车体导向永磁体与悬浮驱动永磁导轨、导向磁轨间的斥力实现五自由度非接触悬浮支撑;与现有的五自由度非接触主动悬浮方案相比,具有耗能低、无电磁干扰的优点;与采用永磁体实现被动悬浮的方案相比,具有浮驱一体,磁场利用率高的优点,与浮驱一体磁悬浮轨道相比,具有抗干扰能力强,悬浮稳定好的优点。
45.综上可见,本发明实施例的隔振浮驱一体式磁悬浮轨道小车,利用通电阻尼线圈产生隔振电磁悬浮阻尼力,可根据负载变化量和干扰大小调节悬浮阻尼力,隙隔绝外部扰动,具有抗干扰能力强、悬浮稳定好的特点。此外,悬浮系统与牵引电机共用永磁导轨,提高了永磁体利用率,降低了轨道成本,特别适用于无菌无尘制药车间、高端芯片制造车间、大型医院等场合。
46.为了更加清晰地展现出本发明所提供的技术方案及所产生的技术效果,下面以具体实施例对本发明实施例所提供的进行详细描述。
47.实施例1
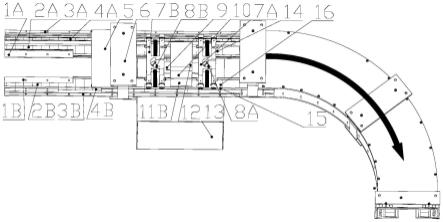
48.图1a为本发明实施例的三维结构示意图,图1b为本发明实施例的主视图,一种隔振浮驱一体式磁悬浮轨道小车,主要由轨道系统、小车系统和载物箱三部分组成,轨道系统主要包括:左导轨支撑板1a、右导轨支撑板1b、左悬浮驱动永磁导轨2a、右悬浮驱动永磁导轨2b、左导轨侧板3a、右导轨侧板3b、左导向磁轨4a、右导向磁轨4b、密封盖5和吊装支架组件6;小车系统包括:前车体支架组件7a、后车体支架组件7b、前自润滑关节轴承8a、后自润滑关节轴承8b、支架连接板组件9、电机连接板10、左电机动子11a、右电机动子11b、锂电池12;载物箱13;左导轨支撑板1a和右导轨支撑板1b位于左悬浮驱动永磁导轨2a、右悬浮驱动永磁导轨2b、左导轨侧板3a、右导轨侧板3b、左导向磁轨4a、右导向磁轨4b和密封盖5的下方,左悬浮驱动永磁导轨2a和右悬浮驱动永磁导轨2b分别位于左导轨支撑板1a和右导轨支撑板1b的上方,并通过紧固螺钉安装在左导轨支撑板1a和右导轨支撑板1b上,左导轨侧板3a位于左导轨支撑板1a和左悬浮驱动永磁导轨2a左侧,并通过紧固螺钉安装在左导轨支撑板1a上,右导轨侧板3b位于右导轨支撑板1b和右悬浮驱动永磁导轨2b右侧,并通过紧固螺钉安装在右导轨支撑板1b上,左导向磁轨4a和右导向磁轨4b分别位于左导轨侧板3a和右导轨侧板3b的内侧,并通过紧固螺钉固定在左导轨侧板3a和右导轨侧板3b的内壁上,密封盖5位于左导轨侧板3a、右导轨侧板3b、左导向磁轨4a和右导向磁轨4b上方,并通过紧固螺钉固定导轨侧板3a和右导轨侧板3b上,吊装支架组件6位于左导轨支撑板1a、右导轨支撑板1b、左悬浮驱动永磁导轨2a、右悬浮驱动永磁导轨2b、左导轨侧板3a、右导轨侧板3b、左导向磁轨4a、右导向磁轨4b和密封盖5的外侧,并通过紧固螺钉固定在左导轨支撑板1a和右导轨支撑板1b上,前车体支架组件7a和后车体支架组件7b位于左导轨支撑板1a、右导轨支撑板1b、左悬浮驱动永磁导轨2a和右悬浮驱动永磁导轨2b上方,前车体支架组件7a位于后车体支架组件7b的右侧,前车体支架组件7a和后车体支架组件7b位于左导轨侧板3a和右导轨侧板3b的中间位置,前车体支架组件7a和后车体支架组件7b位于左导向磁轨4a和右导向磁轨4b的中间位置,前车体支架组件7a和后车体支架组件7b位于密封盖5的下方,前自润滑关节轴承8a和后自润滑关节轴承8b分别位于前车体支架组件7a和后车体支架组件7b的中心圆孔内,并通过紧固螺钉固定在前车体支架组件7a和后车体支架组件7b上,支架连接板组件9位于左悬浮驱动永磁导轨2a和右悬浮驱动永磁导轨2b的中间位置,支架连接板组件9位于前车体支架组件7a和后车体支架组件7b的下方,并通过前自润滑关节轴承8a和后自润滑关节轴承8b将前车体支架组件7a和后车体支架组件7b连接成一体,电机连接板10位于前车体支架组件7a和后车体支架组件7b的中间位置,电机连接板10位于支架连接板组件9的上表面,并通过紧固螺钉安装在支架连接板组件9上,左电机动子11a和右电机动子11b分别位于电机连接板10下表面的左右两侧位置,并通过紧固螺钉固定在电机连接板10上,锂电池12位于电机连接板10的上表面,并通过紧固螺钉安装在电机连接板10上,载物箱13位于左导轨支撑板1a、右导轨支撑板1b和支架连接板组件9的下方,并通过转轴悬挂在支架连接板组件9的下端,左悬浮驱动永磁导轨2a、右悬浮驱动永磁导轨2b的上端面和前车体支架组件7a、后车体支架组件7b的下端面留有一定的间隙,形成承重悬浮驱动气隙14,左导向磁轨4a、右导向磁轨4b的侧面和前车体支架组件7a、后车体支架组件7b的侧面留有一定的间隙,形成导向悬浮气隙15,左导轨侧板3a、右导轨侧板3b的内侧凹槽和前车体支架组件7a、后车体支架组件7b的保护滚轮之间留有一定的间隙,形成保护气隙16。
49.如图2所示,为本发明实施例的轨道系统的三维结构示意图,轨道系统主要包括:左导轨支撑板1a、右导轨支撑板1b、左悬浮驱动永磁导轨2a、右悬浮驱动永磁导轨2b、左导轨侧板3a、右导轨侧板3b、左导向磁轨4a、右导向磁轨4b、密封盖5和吊装支架组件6;左导轨支撑板1a和右导轨支撑板1b位于左悬浮驱动永磁导轨2a、右悬浮驱动永磁导轨2b、左导轨侧板3a、右导轨侧板3b、左导向磁轨4a、右导向磁轨4b和密封盖5的下方,左悬浮驱动永磁导轨2a和右悬浮驱动永磁导轨2b分别位于左导轨支撑板1a和右导轨支撑板1b的上方,并通过紧固螺钉安装在左导轨支撑板1a和右导轨支撑板1b上,左导轨侧板3a位于左导轨支撑板1a和左悬浮驱动永磁导轨2a左侧,并通过紧固螺钉安装在左导轨支撑板1a上,右导轨侧板3b位于右导轨支撑板1b和右悬浮驱动永磁导轨2b右侧,并通过紧固螺钉安装在右导轨支撑板1b上,左导向磁轨4a和右导向磁轨4b分别位于左导轨侧板3a和右导轨侧板3b的内侧,并通过紧固螺钉固定在左导轨侧板3a和右导轨侧板3b的内壁上,密封盖5位于左导轨侧板3a、右导轨侧板3b、左导向磁轨4a和右导向磁轨4b上方,并通过紧固螺钉固定导轨侧板3a和右导轨侧板3b上,吊装支架组件6位于左导轨支撑板1a、右导轨支撑板1b、左悬浮驱动永磁导轨2a、右悬浮驱动永磁导轨2b、左导轨侧板3a、右导轨侧板3b、左导向磁轨4a、右导向磁轨4b和密封盖5的外侧,并通过紧固螺钉固定在左导轨支撑板1a和右导轨支撑板1b上。
50.图3为本发明实施例的小车系统的三维结构示意图,小车系统包括:前车体支架组件7a、后车体支架组件7b、前自润滑关节轴承8a、后自润滑关节轴承8b、支架连接板组件9、电机连接板10、左电机动子11a、右电机动子11b、锂电池12;前车体支架组件7a位于后车体支架组件7b的右侧,前车体支架组件7a和后车体支架组件7b位于支架连接板组件9的上端,前车体支架组件7a和后车体支架组件7b位于电机连接板10、左电机动子11a、右电机动子11b、锂电池12的前后两边,前自润滑关节轴承8a和后自润滑关节轴承8b分别位于前车体支架组件7a和后车体支架组件7b的中心圆孔内,并通过紧固螺钉固定在前车体支架组件7a和后车体支架组件7b上,支架连接板组件9位于前车体支架组件7a和后车体支架组件7b的下方,并通过前自润滑关节轴承8a和后自润滑关节轴承8b将前车体支架组件7a和后车体支架组件7b连接成一体,电机连接板10位于前车体支架组件7a和后车体支架组件7b的中间位置,电机连接板10位于支架连接板组件9的上表面,并通过紧固螺钉安装在支架连接板组件9上,左电机动子11a和右电机动子11b位于电机连接板10下表面的左右两侧位置,并通过紧固螺钉固定在电机连接板10上,锂电池12位于电机连接板10的上表面,并通过紧固螺钉安装在电机连接板10上。
51.图4为本发明实施例的吊装支架组件6的三维结构示意图,吊装支架组件6主要包括:所述的吊装支架组件6主要有吊装板601、左定距螺栓602a、右定距螺栓602b、支架603、左连接板604a和右连接板604b,吊装板601位于左定距螺栓602a、右定距螺栓602b、支架603、左连接板604a和右连接板604b上方,左定距螺栓602a和右定距螺栓602b分别位于吊装板601下方左右两侧,并通过螺纹配合安装在吊装板601上,支架603位于左定距螺栓602a和右定距螺栓602b下方,并通过螺纹配合与左定距螺栓602a和右定距螺栓602b连接,左连接板604a和右连接板604b分别位于支架603下端左右两侧,并通过紧固螺钉安装在支架603下方左右两端。
52.图5a为本发明实施例的车体支架组件7的三维结构仰视示意图,图5b为本发明实施例的车体支架组件7三维结构俯视示意图,车体支架组件7主要包括:车体支架701、左前
保护滚轮702a、左后保护滚轮702b、右前保护滚轮702c、右后保护滚轮702d、左前车体牵引永磁体703a、左后车体牵引永磁体703b、右前车体牵引永磁体703c、右后车体牵引永磁体703d、左牵引阻尼线圈704a、右牵引阻尼线圈704b、左前悬浮阻尼线圈705a、左后悬浮阻尼线圈705b、右前悬浮阻尼线圈705c、右后悬浮阻尼线圈705d、左悬浮永磁体706a、右悬浮永磁体706b、支撑轴707、竖直位移传感器708a和水平位移传感器708b,车体支架701位于左前保护滚轮702a、左后保护滚轮702b、右前保护滚轮702c、右后保护滚轮702d、左前车体牵引永磁体703a、左后车体牵引永磁体703b、右前车体牵引永磁体703c和右后车体牵引永磁体703d的内侧,左前保护滚轮702a、左后保护滚轮702b、右前保护滚轮702c和右后保护滚轮702d位于车体支架701左前、左后、右前、右后的凸台上,并通过安装轴安装在车体支架701上,左前车体牵引永磁体703a、左后车体牵引永磁体703b、右前车体牵引永磁体703c和右后车体牵引永磁体703d位于车体支架701的左前、左后、右前、右后的侧壁外表面上,并通过紧固螺钉安装在车体支架701的左前、左后、右前、右后的侧壁上,左牵引阻尼线圈704a和右牵引阻尼线圈704b缠绕在车体支架701中心安装孔的左右两侧的铁芯上,左牵引阻尼线圈704a位于左前车体牵引永磁体703a和左后车体牵引永磁体703b的中间位置,右牵引阻尼线圈704b位于右前车体牵引永磁体703c和右后车体牵引永磁体703d的中间位置,左前悬浮阻尼线圈705a、左后悬浮阻尼线圈705b、右前悬浮阻尼线圈705c和右后悬浮阻尼线圈705d缠绕在车体支架701的四周外侧的铁芯上,左悬浮永磁体706a和右悬浮永磁体706b位于车体支架701的左右两侧下端,并通过紧固螺钉安装在车体支架701上,支撑轴707安装在车体支架701上,竖直位移传感器708a和水平位移传感器708b分别安装在左牵引阻尼线圈704a、右牵引阻尼线圈704b、左前悬浮阻尼线圈705a、左后悬浮阻尼线圈705b、右前悬浮阻尼线圈705c和右后悬浮阻尼线圈705d的铁芯的端部,并通过环氧树脂胶固定在左牵引阻尼线圈704a、右牵引阻尼线圈704b、左前悬浮阻尼线圈705a、左后悬浮阻尼线圈705b、右前悬浮阻尼线圈705c和右后悬浮阻尼线圈705d的铁芯上。
53.图6为本发明实施例的位移传感器708剖视图,位移传感器708主要包括:位移传感器线圈7081、位移传感器骨架7082、位移传感器屏蔽筒7083和位移传感器屏蔽线7084;位移传感器线圈7081缠绕在位移传感器骨架7082下端环形槽内,并通过环氧树脂胶固定在位移传感器骨架7082上,位移传感器屏蔽线7084通过焊锡与位移传感器线圈7081线头连接,位移传感器屏蔽筒7083位于位移传感器线圈7081和位移传感器骨架7082的径向外侧。
54.图7为本发明实施例的自润滑关节轴承8的剖视图,自润滑关节轴承8主要有万向转轴801和固定支座802;万向转轴801位于固定支座802的径向内侧,固定支座802位于万向转轴801的径向外侧,万向转轴801可在一定范围内实现倾斜或者转动,实现车体在轨道的转弯运动。
55.图8为本发明实施例的支架连接板组件9的三维结构示意图,支架连接板组件9主要包括:连接板901、左滚珠轴承902a、右滚珠轴承902b和车体转轴903;连接板901位于左滚珠轴承902a和右滚珠轴承902b外侧,左滚珠轴承902a和右滚珠轴承902b安装在连接板901左右两侧圆孔内,车体转轴903位于左滚珠轴承902a和右滚珠轴承902b中心圆孔内。
56.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范
围为准。本文背景技术部分公开的信息仅仅旨在加深对本发明的总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1