路面描绘系统的制作方法
1.本公开涉及路面描绘系统。
背景技术:
2.已知有专利文献1中记载的路面描绘装置。
3.现有技术文献
4.专利文献
5.专利文献1:(日本)特开2021-77125号公报
技术实现要素:
6.发明所要解决的技术问题
7.专利文献1中记载的路面描绘装置是在车辆在交叉点左转或者右转的情况下描绘路面的装置。能够通过在左右转时车辆在路面上描绘与本车的左转或者右转的相关的信息,使周围的步行者以及驾驶员注意到本车的存在。
8.然而,专利文献1中的路面描绘装置并未公开在交叉点直行时的路面描绘。但是,在交叉点直行时告知本车的存在由于能够在例如可视性差的交叉点支援更加畅通的交通,因此是有益的。
9.本公开提供一种在车辆在交叉点直行时,支援畅通的交通的路面描绘系统。
10.用于解决技术问题的手段
11.本发明一个侧面的路面描绘系统具备:交叉点检测部,其安装于车辆,并检测交叉点;路面描绘部,其向路面照射光,并投影路面描绘图案;控制部,其控制所述路面描绘部;所述控制部在由所述交叉点检测部检测到的交叉点直行的情况下,在进入交叉点前使所述路面描绘部将表示在交叉点直行的路面描绘图案向车辆前方投影。
12.根据上述结构,在由交叉点检测部检测到的交叉点直行的情况下,路面描绘部在进入交叉点前,将表示在交叉点直行的路面描绘图案向车辆前方投影,因此周围的步行者以及驾驶员能够在该车辆驶入交叉点前知晓该车辆在交叉点直行。由此,周围的步行者以及驾驶员变得易于应对该车辆在交叉点直行,因此能够提供支援更加畅通的交通的路面描绘系统。
13.根据本公开,能够提供一种在车辆在交叉点直行时支援畅通的交通的路面描绘系统。
附图说明
14.图1是示出本实施方式的路面描绘系统的路面描绘的情况的俯视图。
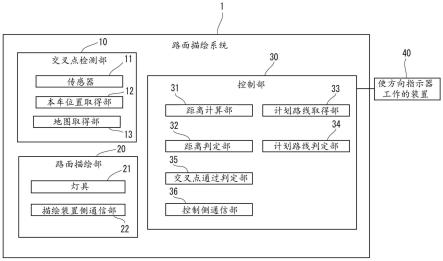
15.图2是说明路面描绘系统的结构的框图。
16.图3是说明从车辆到交叉点的计算距离的图。
17.图4是示出由搭载于车辆的相机得到的图像的图。
18.图5是示出变形例的路面描绘系统的路面描绘的情况的俯视图。
19.附图标记说明
20.1、1a:路面描绘系统;
21.10:交叉点检测部;
22.11:传感器;
23.12:本车位置取得部;
24.13:地图取得部;
25.20,20a:路面描绘部;
26.21、21a:灯具;
27.22:描绘装置侧通信部;
28.30:控制部;
29.31:距离计算部;
30.32:距离判定部;
31.33:计划路线取得部;
32.34:计划路线判定部;
33.35:交叉点通过判定部;
34.36:控制侧通信部;
35.40:使方向指示器工作的装置;
36.100:车辆;
37.100a:信号机;
38.c1:第一角部;
39.c2:第二角部;
40.c3:第三角部;
41.c4:第四角部;
42.i:交叉点;
43.l1:计算距离;
44.p:路面描绘图案;
45.w:后侧端部。
具体实施方式
46.以下,参照附图说明本发明的实施方式。需要注意的是,在实施方式说明中,对于与已经说明的部件具有相同的参照编号的部件,为了说明方便,省略其说明。另外,本附图所示的各个部件的尺寸为了说明方便,可能与实际的各个部材的尺寸不同。
47.另外,在本实施方式的说明中,为了说明方便,适当使用了“左右方向”、“前后方向”、“上下方向”。在此,“上下方向”是包含“上方”以及“下方”的方向。“前后方向”是包含“前方”以及“后方”的方向。“左右方向”是包含“左方”以及“右方”的方向。在下文说明的图中所示的符号u表示上方。符号d表示下方。符号f表示前方。符号b表示后方。符号l表示左方。符号r表示右方。这些方向对应于从出现在车辆内的驾驶员观察的方向。
48.参照图1以及图2,以下对具备本实施方式的路面描绘系统1的车辆100进行说明。
图1是示出本实施方式的路面描绘系统1的路面描绘的情况的俯视图。图2是说明路面描绘系统1的结构的框图。车辆100是能够在例如手动驾驶模式或者自动驾驶模式下行驶的车辆(汽车)。在本实施方式中,路面描绘系统1的所有结构都搭载于车辆100。
49.路面描绘系统1具备交叉点检测部10、路面描绘部20、控制部30。
50.交叉点检测部10搭载于行驶的车辆,在车辆进入交叉点前,检测存在于车辆前方的交叉点i。交叉点检测部10具备包含相机、lidar、加速度传感器、车速传感器、或者制动传感器的至少一种的传感器11。交叉点检测部10基于传感器11的输出,利用公知的方法检测存在于车辆前方的交叉点i。
51.例如在传感器11包含相机的情况下,能够构成为在相机取得的图像中,在特定了本车辆行驶的第一道路、和在与第一道路交叉的方向延伸的第二道路时,检测为在本车辆前方存在交叉点。
52.或者,传感器11除了相机或lidar等取得车辆100的外部信息的传感器之外,还可以包含加速度传感器、车速传感器、制动传感器。
53.路面描绘部20通过向路面照射光,在交叉点i的路面描绘表示在交叉点直行i的图像(路面描绘图案p)。路面描绘部20具备灯具21。在本实施方式中,灯具21是搭载于车辆100前部的左右的头灯。但是,灯具21的配置位置以及结构未特别限定。例如,灯具21可以搭载于位于车辆100后部的尾灯或者倒车灯等。灯具21也可以单独搭载于车辆100。另外例如,灯具21可以配置于车辆100的车顶上。
54.灯具21构成为使车辆100能够在路面上描绘路面描绘图案p。在本实施方式中,路面描绘图案p表现为朝向前方的箭头。路面描绘图案p的表现方法不限于本实施方式。例如,可以通过路面描绘文字表示在交叉点i直行。另外,灯具21也可以构成为,不仅将表示在交叉点i直行的信息还将表示在交叉点i右转以及左转的信息在路面描绘。
55.灯具21的路面描绘的方式没有特别限定。例如,作为路面描绘的方式可以采用投影方式或扫描方式。
56.控制部30构成为在由交叉点检测部10检测出的交叉点i直行的情况下,使路面描绘部20将路面描绘图案p向前方的路面投影。控制部30由电子控制单元(ecu)构成。ecu包含cpu(central processing unit,中央处理单元)等处理器、存储了路面描绘的控制程序的rom(read only memory,只读存储器)、暂时存储与路面描绘的控制相关的数据的ram(read access memory,随机存取存储器)。处理器构成为将从存储于rom的各种车辆控制程序中指定的程序在ram上展开,并与ram协同工作来执行各种处理。
57.接着,使用图1以及图2,对路面描绘系统1的动作进行说明。当车辆100接近交叉点i时,交叉点检测部10确认在前方有交叉点i。在确认出在前方有交叉点i时,在交叉点i直行的情况下,在进入交叉点i前控制部30使路面描绘部20投影路面描绘图案p。
58.专利文献1使用了路面描绘系统作为方向指示器的支援性作用。即,为了强调在左右转前事先向周围唤起注意的效果,投影路面描绘图案。但是,发明者发现:即使在车辆直行的情况下,例如在可视性差的交叉点直行等情况下,事先向周围唤起注意对实现畅通的交通的方面也是有用的。
59.根据本实施方式的路面描绘系统1,在由交叉点检测部10检测出的交叉点i直行的情况下,路面描绘部20在进入交叉点i前,将表示在交叉点i直行的路面描绘图案p向车辆前
方投影。因此,周围的步行者以及驾驶员能够在该车辆将要进入交叉点i前,知道该车辆在交叉点i直行。由此,能够提供如下路面描绘系统1:周围的步行者以及驾驶员变得易于应对该车辆在交叉点i直行,因此支援更加畅通的交通。
60.如前所述,交叉点检测部10具备的传感器11包含相机或lidar等取得车辆100的外部信息的传感器。
61.根据本实施方式的路面描绘系统1,包含取得车辆100的外部信息的传感器,因此能够基于车辆100的外部信息检测交叉点i。
62.交叉点检测部10还可以包含本车位置取得部12、地图取得部13。本车位置取得部12例如由能够通过接收多个人工卫星发送的无线电波检测接收者的当前位置的gps(global positioning system,全球定位系统),取得车辆100的位置。另外,地图取得部13取得例如国内全域的地图数据。在地图数据中包含在地图的哪个位置存在交叉点i等的交叉点信息。交叉点检测部10能够与汽车导航系统通信连接以使例如本车位置取得部12从汽车导航系统取得车辆100的位置,地图取得部13从汽车导航系统取得与交叉点的位置相关的信息。
63.根据本实施方式的路面描绘系统1,交叉点检测部10包含取得本车的位置信息的本车位置取得部12、和包含交叉点信息的地图信息,因此能够更准确地检测交叉点i。
64.图3是说明从车辆100到交叉点i的计算距离l1的图。如图2以及图3所示,控制部30还具有距离计算部31。距离计算部31基于由交叉点检测部10得到的信息,计算从车辆100到交叉点i的计算距离l1。作为用于计算从车辆到交叉点i的距离的方法,可以采用如下等公知的方法:“在交叉点设置信标,根据在车辆接收的信号的强度计算到交叉点i的距离”,“通过汽车导航系统的本车位置信息和地图信息的交叉点位置信息计算距离”,“利用立体相机探测交叉点,并基于交叉点内的任意点的左右相机的视差角计算距离”等。
65.控制部30还可以具有距离判定部32。距离判定部32根据由距离计算部31求得的计算距离l1,判定车辆100是否在交叉点i直行。使用图3,对控制部30具有距离计算部31的情况下的控制部30的动作进行说明。当由交叉点检测部10检测到在车辆100的前方有交叉点i时,距离计算部31计算将第一角部c1和第二角部c2连结的假想的直线与车辆之间的计算距离l1。所谓的第一角部c1和第二角部c2相当于交叉点i的近前侧的左右的角。例如使用立体相机的视差角,计算将第一角部c1和第二角部c2连结的假想的直线与车辆之间的计算距离l1。
66.在此例如所谓的规定距离l2可以为最低左右转动作开始距离l3或者制动距离l4。
67.所谓的最低左右转动作开始距离l3是指“由各国的交通法规规定的、必须具有方向指示器的显示的最低距离”。例如在日本,在交叉点i左右转的情况下,规定必须从靠近左右转的地点30米前发出方向指示器,因此最低左右转动作开始距离l3为30米。
68.对规定距离l2为最低左右转动作开始距离l3的情况下的控制部30的控制进行说明。在从车辆100到交叉点i的计算距离l1由距离计算部31计算时,距离判定部32对计算距离l1和最低左右转动作开始距离l3进行比较。假定最低左右转动作开始距离l3为30米。在来自使方向指示器工作的装置40的信号未被输入的状态下计算距离l1低于30米时,距离判定部32判断为车辆100在交叉点i直行。在距离判定部32判断为车辆100在交叉点i直行时,控制部30使路面描绘部20开始路面描绘图案p的投影。
69.根据本实施方式的路面描绘系统1,在判断为由距离计算部31得到的从车辆到交叉点i的距离低于最低左右转动作开始距离l3时,控制以使路面描绘部20将表示直行的路面描绘图案p在车辆前方投影,因此周围的步行者以及驾驶员能够在该车辆驶入交叉点i前,有充足的时间知晓该车辆在交叉点i直行。另外,控制部30在手动驾驶时也能够判断该车辆在交叉点i直行。
70.另外,规定距离l2可以基于制动距离l4确定。制动距离l4与车速的平方成正比而确定。车速通过由车速传感器测定,或者通过到车辆100的交叉点i的距离变化率计算而求得。在车辆到交叉点i的距离低于制动距离l4时,意味着车辆在交叉点i不打算减速。因为车辆在左右转时会减速,所以在交叉点i不打算减速意味着直行。因此,在车辆到交叉点i的距离低于制动距离l4时,交叉点检测部10判断为车辆直行。需要注意的是,在车辆打算左转的情况下,一般出于安全会在左转地点之前停车。在该情况下,在车辆进入交叉点前车辆到交叉点i的距离不会低于制动距离l4。
71.对规定距离l2为制动距离l4的情况下的控制部30的控制进行说明。在从车辆100到交叉点i的计算距离l1通过距离计算部31被计算时,距离判定部32对计算距离l1和制动距离l4进行比较。在计算距离l1低于制动距离l4时,距离判定部32判断为车辆100在交叉点i直行。在距离判定部32判断为车辆100在交叉点i直行时,控制部30使路面描绘部20开始路面描绘图案p的投影。
72.控制部30在判断为由距离计算部31得到的从车辆到交叉点i的距离低于制动距离l4时,控制以使路面描绘部20将表示直行的路面描绘图案p在车辆前方投影,因此周围的步行者以及驾驶员能够在该车辆驶入交叉点i前,有充足的时间知晓该车辆在交叉点i直行。另外,控制部30也能够在手动驾驶时判断该车辆在交叉点i直行。
73.而且,可以基于最低左右转动作开始距离l3和制动距离l4的比较,确定规定距离l2。
74.对在规定距离l2基于最低左右转动作开始距离l3和制动距离l4的比较而被确定的情况下的控制部30的动作进行说明。距离判定部32首先比较最低左右转动作开始距离l3和制动距离l4。
75.在最低左右转动作开始距离l3比制动距离l4大的情况下,规定距离l2被处理为等同于最低左右转动作开始距离l3。即,在来自使方向指示器工作的装置40的信号被输入的状态下由距离计算部31求得的计算距离l1低于最低左右转动作开始距离l3时,控制部30使路面描绘部20开始路面描绘图案p的投影。
76.在制动距离l4比最低左右转动作开始距离l3大的情况下,规定距离l2被处理为等于制动距离。即,在由距离计算部31求得的计算距离l1低于制动距离l4时,控制部30使路面描绘部20开始路面描绘图案p的投影。
77.控制部30在判断为由距离计算部31得到的从车辆到交叉点i的距离低于最低左右转动作开始距离l3和制动距离l4中更大一方的距离时,控制以使路面描绘部20将表示直行的路面描绘图案p向车辆前方投影,因此周围的步行者以及驾驶员能够在该车辆驶入交叉点i前,有充足的时间知晓该车辆在交叉点i直行。另外,控制部30也能够在手动驾驶时判断该车辆在交叉点i直行。
78.控制部30还可以具有计划路线取得部33和计划路线判定部34。计划路线取得部33
特别在能够自动驾驶行驶的车辆100中,在车辆100行驶的计划路线由车辆控制部确定的情况下,从车辆控制部取得计划路线。计划路线判定部34基于由计划路线取得部33得到的计划路线,判定车辆100在交叉点i是否直行。
79.由计划路线取得部33得到计划路线时,计划路线判定部34判定在下个交叉点i是否直行。然后,由交叉点检测部10检测交叉点i,在计划路线判定部34判断为在该交叉点i直行时,控制部30使路面描绘部20开始路面描绘图案p的投影。
80.根据本实施方式的路面描绘系统1,控制部根据计划路线判定部34的判定结果,使路面描绘部20将表示直行的路面描绘图案p向车辆前方投影,因此能够以更简单的结构进行对路面描绘部20的控制。
81.需要注意的是,由计划路线判定部34判定直行是车辆基于自动驾驶行驶时特别有效的方法。在车辆100能够切换基于自动驾驶的行驶和基于手动驾驶的行驶的情况下,也可以切换车辆100是否在交叉点i直行的判定方法。例如,在基于自动驾驶的行驶时,由计划路线取得部33以及计划路线判定部34判定车辆100是否在交叉点i直行,在基于手动驾驶的行驶时,也可以由距离计算部31以及距离判定部32判定车辆100是否在交叉点i直行。
82.控制部30还可以具备交叉点通过判定部35。交叉点通过判定部35判断车辆100驶入了交叉点i。在本实施方式中,对基于由搭载于车辆100的相机取得的图像判断驶入了交叉点i的实施方式进行说明。
83.使用图4对交叉点通过判定部35的动作进行说明。图4是示出由搭载于车辆100的相机得到的图像的图。另外,图4(a)是车辆100驶入交叉点i前的图像,图4(b)是车辆100驶入交叉点i后的图像。
84.如图4所示,在相机图像中拍摄有车辆前方的风景。在此,交叉点通过判定部35例如通过参照如图4所示那样的相机图像,判断车辆100是否驶入了交叉点i。在图4(a)所示的图像中,能够确认设置于交叉点i的人行横道的后侧端部w。但是,在图4(b)所示的图像中,不能确认设置于交叉点i的人行横道的后侧端部w。这样地,根据人行横道的后侧端部w是否映入相机图像,判断车辆100是否驶入了交叉点i。
85.作为使用相机图像判断车辆100是否驶入了交叉点i的另一个例子,也可以以相当于图1中的交叉点i的前侧角部的第三角部c3以及第四角部c4是否映入相机图像为判断基准。
86.接着,对车辆100驶入了交叉点i的情况下的控制部30的动作进行说明。路面描绘部20在驶入交叉点i前的状态下进行路面描绘图案p的投影。在此,在由交叉点通过判定部35判断为车辆100驶入了交叉点i时,控制部30使路面描绘部20停止路面描绘图案p的投影。
87.在车辆100通过交叉点i前,为了提前使周围的驾驶员或步行者注意车辆100的存在,周围的驾驶员或步行者易于采取适当的行动,路面描绘部20投影路面描绘图案p。换言之,在车辆100驶入交叉点i后,就不需要路面描绘图案p的投影。
88.根据本实施方式的路面描绘系统1,控制部进行控制以使基于交叉点通过判定部35的输出,停止使路面描绘部20将表示直行的路面描绘图案p向车辆前方投影,因此能够在不需要路面描绘时中止路面描绘图案p的投影。由此,能够向周围的步行者以及驾驶员只传达需要的信息,因此能够更好地支援畅通的交通。
89.另外,根据本实施方式的路面描绘系统1,路面描绘部20安装于车辆100,因此能够
从车辆将表示在交叉点i直行的路面描绘图案p投影。由此,能够向周围的步行者以及驾驶员传达在交叉点i直行的信息。
90.(变形例)
91.对本实施方式的变形例进行说明。图5是示出变形例的路面描绘系统1a的路面描绘的情况的俯视图。如图5所示,在变形例的路面描绘系统1a中路面描绘部20a设置于信号机100a。信号机100a是固定于交叉点i而设置的路上基础设施装置的一例。在信号机100a的下部设置灯具21a。路面描绘图案p从设置于信号机的下部的灯具21a被投影。
92.控制部30还具备控制侧通信部36(参照图2)。另外,信号机100a具备描绘装置侧通信部22。控制部30在判断为应该向交叉点i投影路面描绘图案p时,通过从控制侧通信部36向描绘装置侧通信部22发送信号,使信号机100a投影路面描绘图案p。
93.根据本变形例的路面描绘系统1a,路面描绘部20a设置于作为在交叉点i设置的路上基础设施装置的信号机100a。因此,即使车辆100处于较远的位置,也能够从固定于交叉点i的信号机100a以充足的亮度进行路面描绘,从而能够实现可视性高的路面描绘。
94.以上,基于实施方式说明了本公开。本实施方式是本公开的一例,不限于上述实施方式,可以适当变形、改进等。此外,上述实施方式中的各个构成要素的材质、形状、尺寸、数值、形态、数量、配置场所等只要能够达成本公开可以任意,未限定。
95.例如,作为“在进入交叉点前”投影路面描绘图案的一例,对到交叉点的距离低于规定的距离时投影路面描绘图案的形态作了说明。但是,本公开不限于该示例。例如,路面描绘系统也可以构成为在车辆到达交叉点所需预测时间低于规定时间时投影路面描绘图案。车辆达到交叉点所需的预测时间能够根据计算出的到交叉点的距离、和计算出的到交叉点的距离的变化率或由车速传感器等求得的车速而导出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1