一种电子踏板的制作方法
1.本发明属于汽车零部件技术领域,涉及一种电子踏板。
背景技术:
2.在交通业高速发展的今天,越来越多的车辆出现在人们的日常生活中,汽车已经成为主流的交通工具,目前市场上,电子踏板已广泛用于汽车的制动踏板、油门踏板、离合器踏板等相关领域。
3.现有的电子踏板在踩踏时具有迟滞效应,即踏板在踩踏过程中会产生与踏板运动方向相反的迟滞力,从而减缓踏板的运动速度,且随着踏板踩踏幅度的变大,迟滞力就越大。
4.例如一种申请号为201980099502.5的中国发明专利,公开了一种用于机动车辆的踏板,其具有踏板臂(2),具有至少一个第一回位弹簧(8)并且具有摩擦系统(10),所述摩擦系统包括单独的摩擦元件(12)和基础部件(6)的与所述单独的摩擦元件(12)对应地构造的摩擦面(6.1.1)。
5.目前大部分电子踏板的迟滞效果较差,且迟滞力不够平稳。
技术实现要素:
6.本发明的目的是针对现有技术存在的上述问题,提出了一种电子踏板。
7.本发明的目的可通过下列技术方案来实现:一种电子踏板,包括:
8.底座;
9.踏板臂,所述踏板臂可转动地安装于所述底座;
10.摇臂,所述摇臂具有铰接部,所述摇臂通过所述铰接部可转动地与所述底座连接,并且所述摇臂可绕所述铰接部转动,所述摇臂与所述踏板臂联动连接,所述铰接部的表面具有第一摩擦面;
11.迟滞组件,所述迟滞组件具有与所述第一摩擦面相适配的第二摩擦面,所述迟滞组件与所述摇臂联动连接;
12.当所述踏板臂被压下时所述摇臂绕所述铰接部转动,并且所述摇臂驱动所述第二摩擦面抵靠于所述第一摩擦面从而迟滞所述踏板臂转动。
13.较佳的,所述迟滞组件包括翘板,所述翘板可摆动地与所述底座连接并且所述翘板的一端压下时另一端翘起,所述摇臂可传递压力地与所述翘板的一端联动连接,所述第二摩擦面位于所述翘板的另一端,当所述摇臂按压所述翘板的一端时所述翘板的另一端翘起并向所述第二摩擦面施加压力。
14.较佳的,所述迟滞组件还包括弹性件,所述弹性件可传递压力地安装于所述翘板的一端与所述摇臂之间。
15.较佳的,所述翘板位于所述摇臂的下方,当所述踏板臂受到按压时将压力通过所述摇臂传递至所述翘板,并且使所述第二摩擦面从所述铰接部的下方顶向所述第一摩擦
面。
16.较佳的,所述翘板的底部具有弧面支撑部,所述弧面支撑部与所述底座连接并且所述翘板可绕所述弧面支撑部转动。
17.较佳的,所述踏板臂具有联动部,所述铰接部位于所述摇臂的一端,所述联动部与所述摇臂的另一端铰接。
18.较佳的,所述铰接部为轮状结构,所述底座设置有支撑轴,所述支撑轴穿设于所述铰接部的圆心处并且所述铰接部可绕所述支撑轴转动。
19.较佳的,所述底座具有内腔,所述摇臂以及所述迟滞组件均位于所述内腔,所述联动部可通过所述内腔的开口穿入所述内腔。
20.较佳的,所述踏板臂在踩踏过程中随着踩踏力的加大依次通过第一行程段以及第二行程段,当所述踏板臂位于所述第二行程段时受到的迟滞力大于位于所述第一行程段时受到的迟滞力。
21.与现有技术相比,本发明的有益效果为:
22.1、提供了一种能够提供迟滞效果的电子踏板,提供的迟滞效果非常的平稳。
23.2、摇臂向下压的过程中,铰接部转动并且翘板将摇臂的压力传递至铰接部上,且踏板臂被踩踏的幅度越大,摇臂传递给翘板的压力也越大,最终产生的迟滞效果也越强,这样能够根据踏板臂被踩踏的行程而产生对应的迟滞效果。
24.3、踏板的迟滞力随着踏板臂的被踩踏幅度增大而变大,并且在踏板臂受到踩踏的初始阶段受到的迟滞效果较小,更加符合实际的操作习惯,此外,弹性件还能够让踏板臂复位,当驾驶人员松开踏板臂后,弹性件伸展并推动摇臂复位,摇臂复位过程中能够推动踏板臂复位。
25.4、联动部与摇臂铰接,这样能够让踏板臂与摇臂联动连接,并且在踏板臂转动过程中允许踏板臂与摇臂发生相对转动,确保踏板臂与摇臂的运动流畅。
26.5、通过轮状结构的圆弧面设计,能够在铰接部转动过程中让第一摩擦面与第二摩擦面一直保持接触。
附图说明
27.图1为本发明的电子踏板的连接关系示意图。
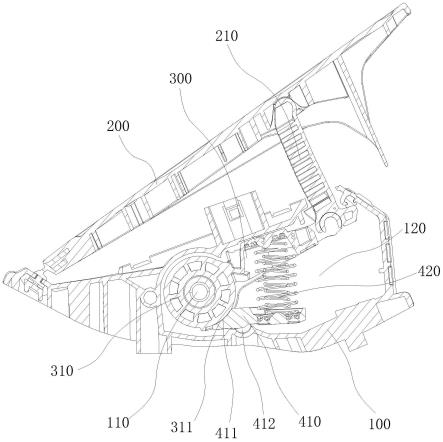
28.图2为本发明的电子踏板的内部结构示意图。
29.图3为本发明的迟滞组件与摇臂的连接关系示意图。
30.图4为本发明的电子踏板的结构分解图。
31.图5为本发明的底座的结构示意图。
32.图6为本发明的电子踏板的整体结构示意图。
33.图中,100、底座;110、支撑轴;120、内腔;200、踏板臂;210、联动部;300、摇臂;310、铰接部;311、第一摩擦面;400、迟滞组件;410、翘板;411、第二摩擦面;412、弧面支撑部;420、弹性件。
具体实施方式
34.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,
但本发明并不限于这些实施例。
35.如图1-6所示,一种电子踏板,包括:底座100、踏板臂200、摇臂300以及迟滞组件400,所述踏板臂200可转动地安装于所述底座100;所述摇臂300具有铰接部310,所述摇臂300通过所述铰接部310可转动地与所述底座100连接,并且所述摇臂300可绕所述铰接部310转动,所述摇臂300与所述踏板臂200联动连接,所述铰接部310的表面具有第一摩擦面311;所述迟滞组件400具有与所述第一摩擦面311相适配的第二摩擦面411,所述迟滞组件400与所述摇臂300联动连接;当所述踏板臂200被压下时所述摇臂300绕所述铰接部310转动,并且所述摇臂300驱动所述第二摩擦面411抵靠于所述第一摩擦面311从而迟滞所述踏板臂200转动。
36.底座100与车身连接,踏板臂200安装在底座100上并且可以踩踏,由于摇臂300与踏板臂200联动连接,踏板臂200被踩下时可以带动摇臂300朝下转动,而摇臂300朝下转动时能够向迟滞组件400传递压力,进而让迟滞组件400的第二摩擦面411以一定压力抵靠在第一摩擦面311上,由于踏板臂200被朝下踩压的过程中摇臂300的铰接部310会发生转动,第一摩擦面311与第二摩擦面411之间产生的摩擦力通过铰接部310阻碍摇臂300转动,进而形成阻碍踏板臂200转动的迟滞力。
37.在上述过程中,由于迟滞组件400与摇臂300联动连接的,摇臂300与踏板臂200联动连接,踏板臂200通过摇臂300将压力传递给迟滞组件400的第二摩擦面411,在此过程中第一摩擦面311随着铰接部310的转动相对于第二摩擦面411运动,所以提供的迟滞效果非常的平稳
38.如图1-4所示,所述迟滞组件400包括翘板410,所述翘板410可摆动地与所述底座100连接并且所述翘板410的一端压下时另一端翘起,所述摇臂300可传递压力地与所述翘板410的一端联动连接,所述第二摩擦面411位于所述翘板410的另一端,当所述摇臂300按压所述翘板410的一端时所述翘板410的另一端翘起并向所述第二摩擦面411施加压力。
39.翘板410类似于跷跷板结构,翘板410的中部与底座100铰接,所以翘板410的一端压下时另一端翘起,通过翘板410能够将摇臂300的压力传递给第二摩擦面411,当踏板臂200被踩压时,摇臂300能够按压翘板410的一端,从而使翘板410的另一端翘起并朝着铰接部310施加压力,所以摇臂300向下压的过程中,铰接部310转动并且翘板410将摇臂300的压力传递至铰接部310上,且踏板臂200被踩踏的幅度越大,摇臂300传递给翘板410的压力也越大,最终产生的迟滞效果也越强,这样能够根据踏板臂200被踩踏的行程而产生对应的迟滞效果。
40.优选的,所述迟滞组件400还包括弹性件420,所述弹性件420可传递压力地安装于所述翘板410的一端与所述摇臂300之间。
41.摇臂300在下压的过程中,弹性件420将压力传递给翘板410,从而使翘板410具有第二摩擦面411的一端产生翘起的趋势,进而让第二摩擦面411以相应的压力与第一摩擦面311抵靠在一起,并且通过弹性件420能够让迟滞效果随着踏板臂200被踩踏的幅度变大而增加。
42.弹性件420优选为弹簧,在实际踩压踏板的过程中,当踏板臂200被踩压的幅度较小时,弹性件420比较容易压缩,所以传递给翘板410的压力较小,第一摩擦面311与第二摩擦面411之间的摩擦力也比较小,所以迟滞效果较弱,随着踏板臂200踩踏幅度的加大,弹性
件420基本上不再压缩,在此阶段摇臂300的压力完全传递至翘板410,此时第一摩擦面311与第二摩擦面411的摩擦力比较大,所以迟滞效果比较强,且踏板臂200踩踏至最大幅度时第一摩擦面311与第二摩擦面411之间的摩擦力最大,迟滞效果最强。
43.通过上述的弹性件420,能够让踏板的迟滞力随着踏板臂200的被踩踏幅度增大而变大,并且在踏板臂200受到踩踏的初始阶段受到的迟滞效果较小,更加符合实际的操作习惯,此外,弹性件420还能够让踏板臂200复位,当驾驶人员松开踏板臂200后,弹性件420伸展并推动摇臂300复位,摇臂300复位过程中能够推动踏板臂200复位。
44.优选的,所述翘板410位于所述摇臂300的下方,当所述踏板臂200受到按压时将压力通过所述摇臂300传递至所述翘板410,并且使所述第二摩擦面411从所述铰接部310的下方顶向所述第一摩擦面311。
45.由于踏板受到踩踏时,摇臂300是向下转动的,这样能够向下压翘板410的一端,使得翘板410具有第二摩擦面411的一端翘起,即第二摩擦面411是铰接部310的下方朝上抵靠第一摩擦面311。
46.如图1-4所示,所述翘板410的底部具有弧面支撑部412,所述弧面支撑部412与所述底座100连接并且所述翘板410可绕所述弧面支撑部412转动。
47.弧面支撑部412实际上就是翘板410底部的凸块结构,且弧面支撑部412的底面为弧面,底座100具有与弧面支撑部412相适配的弧形凹槽,弧面支撑部412位于弧形凹槽内,翘板410可以通过弧面支撑部412实现一头翘起另一头下降的效果,且在翘板410的底部设置弧面支撑部412的设计能够极大的提高翘板410与底座100连接的稳定性,不会因为频繁运动而产生断轴的情况。
48.如图1-4所示,所述踏板臂200具有联动部210,所述铰接部310位于所述摇臂300的一端,所述联动部210与所述摇臂300的另一端铰接。联动部210与摇臂300铰接,这样能够让踏板臂200与摇臂300联动连接,并且在踏板臂200转动过程中允许踏板臂200与摇臂300发生相对转动,确保踏板臂200与摇臂300的运动流畅。
49.如图1、图4、图5所示,所述铰接部310为轮状结构,所述底座100设置有支撑轴110,所述支撑轴110穿设于所述铰接部310的圆心处并且所述铰接部310可绕所述支撑轴110转动。在摇臂300转动过程中,铰接部310绕着支撑轴110转动,且由于铰接部310是轮状结构,所以第一摩擦面311为圆弧面,而第二摩擦面411对应第一摩擦面311构造,使得第一摩擦面311与第二摩擦面411互补,通过轮状结构的圆弧面设计,能够在铰接部310转动过程中让第一摩擦面311与第二摩擦面411一直保持接触。
50.如图1-5所示,所述底座100具有内腔120,所述摇臂300以及所述迟滞组件400均位于所述内腔120,所述联动部210可通过所述内腔120的开口穿入所述内腔120。优选的,这种设计能够将摇臂300以及迟滞组件400集成在内腔120中,避免这些结构外露,让整体结构更加的紧凑,并且减小踏板所需的安装空间。
51.如图1、图2、图3、图6所示,所述踏板臂200在踩踏过程中随着踩踏力的加大依次通过第一行程段(图中未标出)以及第二行程段(图中未标出),当所述踏板臂200位于所述第二行程段时受到的迟滞力大于位于所述第一行程段时受到的迟滞力。
52.简单来说,踏板臂200踩踏的幅度越大,受到的迟滞力也越大,由于踏板具有弹性件420,所以踏板臂200在踩踏时的幅度大小与受到的踩踏力有关,迟滞力则与踩踏幅度以
及踩踏力大小正相关,踏板臂200在刚刚踩下时位于第一行程段内,随着踏板臂200继续踩下其进入第二行程段内,为了符合驾驶员的操作习惯,通过本踏板的迟滞组件400能够让迟滞力随着踩踏的行程增大呈现出先小后大的趋势,当踏板臂200在第一行程段时其受到的迟滞力非常小,当踏板臂200在第二行程段时,其受到的迟滞力急剧增大,知道踏板臂200到极限位置时停止。
53.例如,当踏板臂200受到的踩踏力f1为15.5n
±
3n时,踏板臂200的转动幅度小于等于1
°
并位于第一行程内,此时受到的迟滞力h1大于等于25%的f1;当踏板臂200受到的踩踏力f2为35n
±
5n时,踏板臂200的转动幅度约为14.9
±
0.5
°
并位于第二行程段内,此时受到的迟滞力h2大于等于25%的f2。
54.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
55.另外,在本发明中如涉及“第一”、“第二”、“一”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
56.在本发明中,除非另有明确的规定和限定,术语“连接”、“固定”等应做广义理解,例如,“固定”可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。
57.另外,本发明各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1