一种具有测绘路径规划功能的智能车的制作方法
1.本发明属于智能测绘路径规划技术领域,具体为一种具有测绘路径规划功能的智能车。
背景技术:
2.在对一些区域进行路径规划时,现有技术中可以通过智能车对路径进行预先测绘,然后将数据传递到控制中心对智能车传递过来的图像与超声波数据进行处理,并规划出最适合的道路路径,可以适合在一些环境恶劣的区域进行使用。但是目前智能车存在一些问题:1、在一些泥泞的区域测绘时,车轮容易粘接大量的泥土,影响车轮的转动;2、在智能车测绘的过程中,信号容易受到环境的干扰,导致信号传递受到影响,造成测绘的同步率受到影响,进而影响最后的路径规划结果。因此,需要设计一种具有测绘路径规划功能的智能车。
技术实现要素:
3.本发明的目的就在于为了解决上述问题而提供一种具有测绘路径规划功能的智能车,解决了背景技术中提到的问题。
4.为了解决上述问题,本发明提供了一种具有测绘路径规划功能的智能车技术方案:
5.一种具有测绘路径规划功能的智能车,包括底座、车壳、信号发射机构、驱动机、车轮、清理机构、车灯、雷达发射器、中心处理器、车窗、驱动座、摄像机、雨刮驱动器、雨刮刷,所述底座上固定连接有车壳,所述车壳上设置有信号发射机构,所述底座的内部固定连接有驱动机,所述驱动机的输出轴上固定连接有车轮,所述底座的内部设置有清理机构,所述底座上固定安装有两个对称分布的车灯,所述底座上固定安装有多个均匀分布的雷达发射器,所述车壳的内部固定安装有中心处理器。
6.作为优选,所述车壳上固定连接有两个扩展架,两个所述扩展架在所述车壳上对称分布,扩展架可以用于特定装置的固定。
7.作为优选,所述车壳的内部固定连接有驱动座,所述驱动座的输出轴上固定连接有摄像机,所述车壳上固定连接有车窗,所述车壳的内部固定连接有雨刮驱动器,所述雨刮驱动器的输出端上固定连接有雨刮刷,所述雨刮驱动器和雨刮刷均与所述车窗接触,雨刮刷可以对车窗进行清理。
8.作为优选,所述信号发射机构包括安装座、转动管、连接轴、信号收发天线、锥齿轮一、固定杆、锥齿轮二、直齿轮一、直齿轮二、减速电机,所述车壳上固定连接有安装座,所述安装座的内部通过轴承安装有转动管,所述转动管上通过轴承安装有连接轴,所述连接轴的一端固定连接有信号收发天线,所述连接轴的另一端固定连接有锥齿轮一,所述安装座的内部固定连接有固定杆,所述固定杆的一端固定连接有锥齿轮二,所述转动管的外侧固定连接有直齿轮一,所述安装座的内部通过轴承安装有直齿轮二,所述安装座上固定安装
有减速电机,减速电机带动直齿轮二进行转动,直齿轮二通过直齿轮一带动转动管进行转动,转动管在转动的过程中带动信号收发天线以转动管的中心为圆心进行转动,转动管在转动的过程中带动锥齿轮一进行转动,锥齿轮一在转动的过程中通过与锥齿轮二之间的啮合带动连接轴进行转动,连接轴带动信号收发天线以连接轴的中心为圆心进行转动,从而可以有效的增加信号收发天线的信号收发范围,可以避免信号薄弱影响对智能车的控制。
9.作为优选,所述锥齿轮一与所述锥齿轮二啮合,所述减速电机的输出轴与所述直齿轮二通过螺栓连接,所述直齿轮一与所述直齿轮二啮合,锥齿轮可以改变动力的传递方向。
10.作为优选,所述清理机构包括铰接板、支撑杆、拉簧、超声波发射器、超声波刮板、硅胶条、固定板、弹性带,所述底座的内部铰接有铰接板,所述铰接板的内部滑动连接有支撑杆,所述支撑杆上设置有拉簧,所述支撑杆的一端固定连接有超声波发射器,所述超声波发射器的输出端固定连接有超声波刮板,所述超声波刮板上固定连接有硅胶条,所述底座的内部固定连接有固定板,所述固定板上设置有弹性带,所述硅胶条与所述车轮接触,超声波发射器通过输出端将超声波传递到超声波刮板上,并且超声波刮板与硅胶条在拉簧与弹性带之间的弹力带动下顶在车轮的外侧,当车轮外侧粘附有大量的泥土后,车轮在转动的过程中带动泥土与超声波刮板接触便可通过振动将泥土从车轮上刮取下来,可以避免泥土过多影响车轮的转动,使得智能车可以在恶劣的环境下作业。
11.作为优选,所述拉簧的一端与所述支撑杆固定连接,所述拉簧的另一端与所述铰接板固定连接,所述弹性带的一端与所述固定板固定连接,所述弹性带的另一端与所述铰接板固定连接,弹性带可以通过弹力带动超声波刮板上的硅胶条顶在车轮上。
12.作为优选,还包括雷达传感模块、摄像头模块、车辆驱动模块、数据采集处理模块、供电模块、路径控制计算模块、数据信号传递模块、控制中心接收模块、路径测绘规划模块,所述中心处理器与所述雷达传感模块连接,所述中心处理器与所述摄像头模块连接,所述中心处理器与所述车辆驱动模块连接,所述中心处理器与所述数据采集处理模块连接,所述中心处理器与所述供电模块连接,所述中心处理器与所述路径控制计算模块连接,所述中心处理器与所述数据信号传递模块连接,所述数据信号传递模块与所述控制中心接收模块连接,所述控制中心接收模块与所述路径测绘规划模块连接,在对路径进行规划时,将车辆放置到预定的位置后通过中心处理器控制车辆驱动模块控制驱动机上的车轮进行转动,车轮在转动的过程中带动底座与车壳进行移动,智能车在移动的过程中可以通过摄像机对智能车前方的图像数据进行采集,采集后的数据传递到中心处理器的内部经过数据采集处理模块的处理后再次反馈到中心处理器的内部,然后传递到数据信号传递模块的内部,并通过信号收发天线发生到控制中心接收模块的上,然后通过控制中心内部的路径测绘规划模块对数据进行处理绘制。
13.本发明的有益效果是:本发明涉及一种具有测绘路径规划功能的智能车,具有可以增强信号收发与便于清理车轮的特点,在具体的使用中,具有以下有益效果:
14.首先,通过在车壳上加设安装座、转动管与连接轴等结构,在智能车行驶的过程中可以通过转动管带动信号收发天线以转动管的中心为圆心进行转动,增加纵向接收的面积,并且还可以通过锥齿轮之间的配合带动信号收发天线以连接轴的圆心为中心进行转动,从而可以有效的增加信号接收范围,可以有效的避免信号影响最后的测绘结果。
15.其次,通过在底座的内部加设铰接板、超声波发射器与超声波刮板等结构,在车轮转动的过程中可以通过超声波刮板对车轮进行清理,从而可以有效的避免粘接的泥土影响车轮转动。
附图说明:
16.为了易于说明,本发明由下述的具体实施及附图作以详细描述。
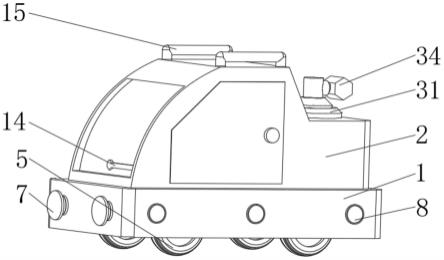
17.图1为本发明的整体结构立体图;
18.图2为本发明的图1的正视剖视图;
19.图3为本发明的图1的底座的正视剖视图;
20.图4为本发明的图2的安装座的放大剖视图;
21.图5为本发明的图3的a部结构放大图;
22.图6为本发明的图2的中心处理器工作模块图。
23.图中:1、底座;2、车壳;3、信号发射机构;4、驱动机;5、车轮;6、清理机构;7、车灯;8、雷达发射器;9、中心处理器;10、车窗;11、驱动座;12、摄像机;13、雨刮驱动器;14、雨刮刷;15、扩展架;31、安装座;32、转动管;33、连接轴;34、信号收发天线;35、锥齿轮一;36、固定杆;37、锥齿轮二;38、直齿轮一;39、直齿轮二;30、减速电机;61、铰接板;62、支撑杆;63、拉簧;64、超声波发射器;65、超声波刮板;66、硅胶条;67、固定板;68、弹性带;91、雷达传感模块;92、摄像头模块;93、车辆驱动模块;94、数据采集处理模块;95、供电模块;96、路径控制计算模块;97、数据信号传递模块;98、控制中心接收模块;99、路径测绘规划模块。
具体实施方式:
24.如图1-6所示,本具体实施方式采用以下技术方案:
25.实施例:
26.一种具有测绘路径规划功能的智能车,包括底座1、车壳2、信号发射机构3、驱动机4、车轮5、清理机构6、车灯7、雷达发射器8、中心处理器9、车窗10、驱动座11、摄像机12、雨刮驱动器13、雨刮刷14,所述底座1上固定连接有车壳2,所述车壳2上设置有信号发射机构3,所述底座1的内部固定连接有驱动机4,所述驱动机4的输出轴上固定连接有车轮5,所述底座1的内部设置有清理机构6,所述底座1上固定安装有两个对称分布的车灯7,所述底座1上固定安装有多个均匀分布的雷达发射器8,所述车壳2的内部固定安装有中心处理器9。
27.其中,所述车壳2上固定连接有两个扩展架15,两个所述扩展架15在所述车壳2上对称分布,扩展架15可以用于特定装置的固定。
28.其中,所述车壳2的内部固定连接有驱动座11,所述驱动座11的输出轴上固定连接有摄像机12,所述车壳2上固定连接有车窗10,所述车壳2的内部固定连接有雨刮驱动器13,所述雨刮驱动器13的输出端上固定连接有雨刮刷14,所述雨刮驱动器13和雨刮刷14均与所述车窗10接触,雨刮刷14可以对车窗10进行清理。
29.其中,所述信号发射机构3包括安装座31、转动管32、连接轴33、信号收发天线34、锥齿轮一35、固定杆36、锥齿轮二37、直齿轮一38、直齿轮二39、减速电机30,所述车壳2上固定连接有安装座31,所述安装座31的内部通过轴承安装有转动管32,所述转动管32上通过轴承安装有连接轴33,所述连接轴33的一端固定连接有信号收发天线34,所述连接轴33的
另一端固定连接有锥齿轮一35,所述安装座31的内部固定连接有固定杆36,所述固定杆36的一端固定连接有锥齿轮二37,所述转动管32的外侧固定连接有直齿轮一38,所述安装座31的内部通过轴承安装有直齿轮二39,所述安装座31上固定安装有减速电机30,减速电机30带动直齿轮二39进行转动,直齿轮二39通过直齿轮一38带动转动管32进行转动,转动管32在转动的过程中带动信号收发天线34以转动管32的中心为圆心进行转动,转动管32在转动的过程中带动锥齿轮一35进行转动,锥齿轮一35在转动的过程中通过与锥齿轮二37之间的啮合带动连接轴33进行转动,连接轴33带动信号收发天线34以连接轴33的中心为圆心进行转动,从而可以有效的增加信号收发天线34的信号收发范围,可以避免信号薄弱影响对智能车的控制。
30.其中,所述锥齿轮一35与所述锥齿轮二37啮合,所述减速电机30的输出轴与所述直齿轮二39通过螺栓连接,所述直齿轮一38与所述直齿轮二39啮合,锥齿轮可以改变动力的传递方向。
31.其中,所述清理机构6包括铰接板61、支撑杆62、拉簧63、超声波发射器64、超声波刮板65、硅胶条66、固定板67、弹性带68,所述底座1的内部铰接有铰接板61,所述铰接板61的内部滑动连接有支撑杆62,所述支撑杆62上设置有拉簧63,所述支撑杆62的一端固定连接有超声波发射器64,所述超声波发射器64的输出端固定连接有超声波刮板65,所述超声波刮板65上固定连接有硅胶条66,所述底座1的内部固定连接有固定板67,所述固定板67上设置有弹性带68,所述硅胶条66与所述车轮5接触,超声波发射器64通过输出端将超声波传递到超声波刮板65上,并且超声波刮板65与硅胶条66在拉簧63与弹性带68之间的弹力带动下顶在车轮5的外侧,当车轮5外侧粘附有大量的泥土后,车轮5在转动的过程中带动泥土与超声波刮板65接触便可通过振动将泥土从车轮5上刮取下来,可以避免泥土过多影响车轮5的转动,使得智能车可以在恶劣的环境下作业。
32.其中,所述拉簧63的一端与所述支撑杆62固定连接,所述拉簧63的另一端与所述铰接板61固定连接,所述弹性带68的一端与所述固定板67固定连接,所述弹性带68的另一端与所述铰接板61固定连接,弹性带68可以通过弹力带动超声波刮板65上的硅胶条66顶在车轮5上。
33.其中,还包括雷达传感模块91、摄像头模块92、车辆驱动模块93、数据采集处理模块94、供电模块95、路径控制计算模块96、数据信号传递模块97、控制中心接收模块98、路径测绘规划模块99,所述中心处理器9与所述雷达传感模块91连接,所述中心处理器9与所述摄像头模块92连接,所述中心处理器9与所述车辆驱动模块93连接,所述中心处理器9与所述数据采集处理模块94连接,所述中心处理器9与所述供电模块95连接,所述中心处理器9与所述路径控制计算模块96连接,所述中心处理器9与所述数据信号传递模块97连接,所述数据信号传递模块97与所述控制中心接收模块98连接,所述控制中心接收模块98与所述路径测绘规划模块99连接,在对路径进行规划时,将车辆放置到预定的位置后通过中心处理器9控制车辆驱动模块93控制驱动机4上的车轮5进行转动,车轮5在转动的过程中带动底座1与车壳2进行移动,智能车在移动的过程中可以通过摄像机12对智能车前方的图像数据进行采集,采集后的数据传递到中心处理器9的内部经过数据采集处理模块94的处理后再次反馈到中心处理器9的内部,然后传递到数据信号传递模块97的内部,并通过信号收发天线34发生到控制中心接收模块98的上,然后通过控制中心内部的路径测绘规划模块99对数据
进行处理绘制。
34.本发明的使用状态为:在对路径进行规划时,将车辆放置到预定的位置后通过中心处理器9控制车辆驱动模块93控制驱动机4上的车轮5进行转动,车轮5在转动的过程中带动底座1与车壳2进行移动,智能车在移动的过程中可以通过摄像机12对智能车前方的图像数据进行采集,采集后的数据传递到中心处理器9的内部经过数据采集处理模块94的处理后再次反馈到中心处理器9的内部,然后传递到数据信号传递模块97的内部,并通过信号收发天线34发生到控制中心接收模块98的上,然后通过控制中心内部的路径测绘规划模块99对数据进行处理绘制;
35.在智能车移动的过程中,启动减速电机30,减速电机30带动直齿轮二39进行转动,直齿轮二39通过直齿轮一38带动转动管32进行转动,转动管32在转动的过程中带动信号收发天线34以转动管32的中心为圆心进行转动,转动管32在转动的过程中带动锥齿轮一35进行转动,锥齿轮一35在转动的过程中通过与锥齿轮二37之间的啮合带动连接轴33进行转动,连接轴33带动信号收发天线34以连接轴33的中心为圆心进行转动,从而可以有效的增加信号收发天线34的信号收发范围,可以避免信号薄弱影响对智能车的控制;
36.在智能车行驶的过程中遇到泥泞路面时,启动超声波发射器64,超声波发射器64通过输出端将超声波传递到超声波刮板65上,并且超声波刮板65与硅胶条66在拉簧63与弹性带68之间的弹力带动下顶在车轮5的外侧,当车轮5外侧粘附有大量的泥土后,车轮5在转动的过程中带动泥土与超声波刮板65接触便可通过振动将泥土从车轮5上刮取下来,可以避免泥土过多影响车轮5的转动,使得智能车可以在恶劣的环境下作业。
37.以上显示和描述了本发明的基本原理和主要特征和本发明的优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内,本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1