自动驾驶控制方法及车辆与流程
本发明涉及道路交通安全,更具体地,涉及自动驾驶控制方法及车辆。
背景技术:
1、在车辆驾驶过程中,驾驶员经常会遇到因强光照射而影响视线的情况,即“晃眼”现象,例如在不得不面向阳光方向驾驶时。在这种情况下,驾驶员往往不得不忍受长时间的高光情况下带来的眼部不适来进行驾驶。此外,光线的骤然变化也会导致晃眼现象的发生,例如车辆在转弯后或驶出建筑物的遮阴区后突然受到太阳光直射,遇到对向车道的车头灯强光照射、进出隧道时的光线明暗骤变等等,这种时候驾驶员会有一瞬间完全无法看清前方路况,并且通常需要数秒或数十秒才能逐渐回复。这种因光线照射而导致的晃眼现象不仅对驾驶员产生影响,对于自动驾驶车辆同样造成影响。
2、车辆自动驾驶技术依赖于各类传感器,其中摄像头(也称“相机”)是其中的一种常用的车载传感设备。对于基于摄像头或主要基于摄像头的自动驾驶技术,车辆对摄像头的捕捉画面进行对象识别,并进而做出自动驾驶决策,因此摄像头画面的质量对于自动驾驶决策的安全性和可靠性至关重要。因此,当摄像头的视野中遭遇强光照射时,摄像头的画面将受到类似于人感受到的晃眼现象,因而可能造成自动驾驶功能的识别和判断失误,从而引发事故,对交通安全造成了隐患。针对这类情况,目前尚没有能够有效解决的办法。
技术实现思路
1、提供本
技术实现要素:
以便以简化形式介绍将在以下具体实施方式中进一步的描述一些概念。本发明内容并非旨在标识所要求保护的主题的关键特征或必要特征,也不旨在用于帮助确定所要求保护的主题的范围。
2、针对以上问题,本发明提供了一种改进的自动驾驶控制方案,能够预先确定可能存在受光线影响导致自动驾驶功能失效的风险位置,并随车辆位置的变化相应地采取预警和措施,调整自动驾驶策略,从而有效解决光线对自动驾驶功能不利影响的问题,消除自动驾驶安全隐患。
3、根据本发明的一个方面,提供了一种用于车辆的自动驾驶控制方法,包括:
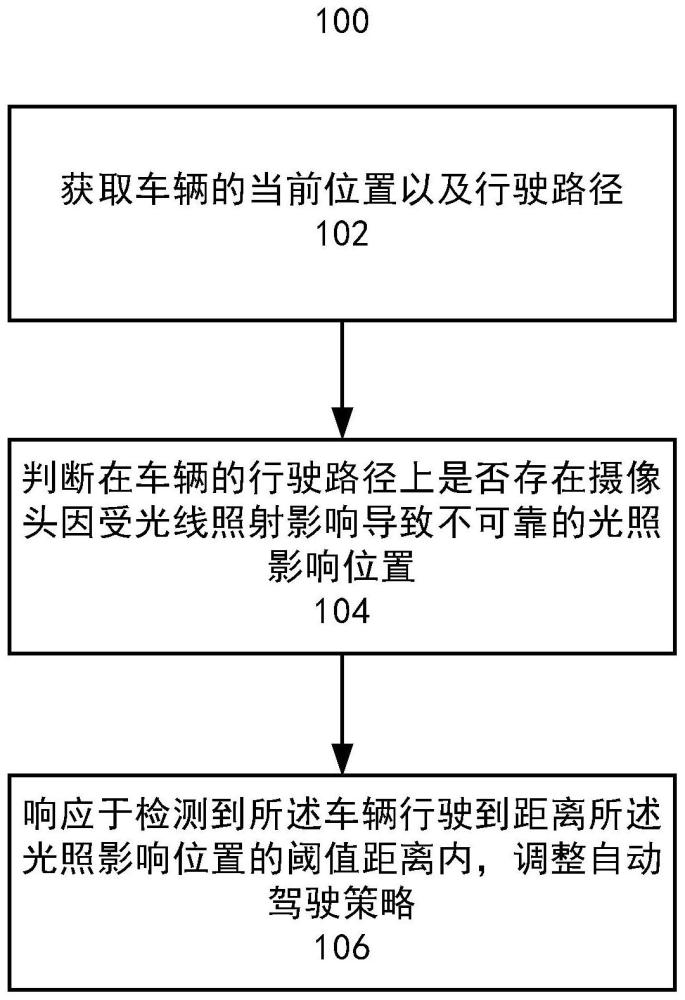
4、获取车辆的当前位置以及行驶路径;
5、判断在所述车辆的行驶路径上是否存在摄像头因受光线照射影响导致不可靠的光照影响位置,其中所述摄像头用于提供所述车辆的自动驾驶所需要的部分传感数据;以及
6、响应于检测到所述车辆行驶到距离所述光照影响位置的阈值距离内,调整自动驾驶策略。
7、根据本发明的进一步实施例,判断在所述车辆的行驶路径上是否存在摄像头因受光线照射影响导致不可靠的光照影响位置进一步包括:基于所述当前位置以及行驶路径确定所述车辆经过所述行驶路径上的各位置的时间以及车头朝向;基于所确定的经过各位置的时间计算该时间各位置的太阳高度角;以及当太阳高度角处于阈值范围内时,将相应位置确定为所述光照影响位置。
8、根据本发明的进一步实施例,判断在所述车辆的行驶路径上是否存在摄像头因受光线照射影响导致不可靠的光照影响位置进一步包括:基于所确定的经过各位置的时间,获取所述车辆经过各位置时的天气预报;以及基于所述天气预报排除不受太阳光照影响的位置。
9、根据本发明的进一步实施例,响应于检测到所述车辆行驶到距离所述光照影响位置的阈值距离内,调整自动驾驶策略进一步包括:测量当前车辆周围环境光强度;以及响应于测得的环境光强度小于阈值光强度,判定摄像头不受光线照射影响。
10、根据本发明的进一步实施例,判断在所述车辆的行驶路径上是否存在摄像头因受光线照射影响导致不可靠的光照影响位置进一步包括:确定所述行驶路径上是否存在被标记为光照影响位置的位置;获取相关光照影响位置的信息,所述信息至少包括该位置受光照影响的时间和光源方向;基于所述当前位置以及行驶路径确定所述车辆经过所述相关光照影响位置的时间和车头朝向;以及基于经过所述相关光照影响位置的时间和车头朝向以及相应光照影响位置受光照影响的时间和光源方向来判断该位置是否构成影响所述车辆的光照影响位置。
11、根据本发明的进一步实施例,调整自动驾驶策略包括以下的一种或多种:调整自动驾驶决策所使用的传感器;调整自动驾驶等级;调整车辆行驶速度;以及调整规划路径。
12、根据本发明的另一方面,提供了一种用于标识车载摄像头受光照影响位置的方法,包括:
13、确定数字地图上是否存在光线照射导致摄像头不可靠的情形的位置,其中所述摄像头用于提供车辆的自动驾驶所需要的部分传感数据;以及
14、将被确定为存在光线照射导致摄像头不可靠的情形的位置标识为光照影响位置,并记录该位置受光照影响的时间和光源方向。
15、根据本发明的进一步实施例,所述方法进一步包括:收集车载摄像头的过曝图像;基于与所述过曝图像相关联的数据采集时间和位置信息,确定所述过曝图像的过曝原因是否为光线照射导致;对因光线照射导致的过曝图像进行标记,形成训练数据集;以及基于所述训练数据集,训练用于摄像头的光照影响情形识别模型。
16、根据本发明的进一步实施例,所述方法进一步包括:收集车辆上报的光照影响事件,所述光照影响事件是由所述车辆响应于光照影响情形识别模型识别出因光线照射导致过曝的图像而确定的;以及将所述光照影响事件的发生位置标识为光照影响位置,并记录相应的时间以及车头朝向。
17、根据本发明的又一方面,提供了一种车辆,包括:
18、摄像头,所述摄像头被配置成捕捉图像数据作为所述车辆的自动驾驶所需要的部分传感数据;
19、定位单元,所述定位单元被配置成确定所述车辆的当前位置;以及
20、控制单元,所述控制单元被配置成:
21、获取所述车辆的行驶路径;
22、判断在所述车辆的行驶路径上是否存在摄像头因受光线照射影响导致不可靠的光照影响位置;以及
23、响应于检测到所述车辆行驶到距离所述光照影响位置的阈值距离内,调整自动驾驶策略。
24、根据本发明的进一步实施例,判断在所述车辆的行驶路径上是否存在摄像头因受光线照射影响导致不可靠的光照影响位置进一步包括:基于所述当前位置以及行驶路径确定所述车辆经过所述行驶路径上的各位置的时间以及车头朝向;基于所确定的经过各位置的时间计算该时间各位置的太阳高度角;以及当太阳高度角处于阈值范围内时,将相应位置确定为所述光照影响位置。
25、根据本发明的进一步实施例,判断在所述车辆的行驶路径上是否存在摄像头因受光线照射影响导致不可靠的光照影响位置进一步包括:基于所确定的经过各位置的时间,获取所述车辆经过各位置时的天气预报;以及基于所述天气预报排除不受太阳光照影响的位置。
26、根据本发明的进一步实施例,所述车辆进一步包括:环境光强度测量单元,所述环境光强度测量单元被配置成测量当前车辆周围环境光强度,并且所述控制单元被进一步配置成响应于测得的环境光强度小于阈值光强度,判定摄像头不受光线照射影响。
27、根据本发明的进一步实施例,判断在所述车辆的行驶路径上是否存在摄像头因受光线照射影响导致不可靠的光照影响位置进一步包括:确定所述行驶路径上是否存在被标记为光照影响位置的位置;获取相关光照影响位置的信息,所述信息至少包括该位置受光照影响的时间和光源方向;基于所述当前位置以及行驶路径确定所述车辆经过所述相关光照影响位置的时间和车头朝向;以及基于经过所述相关光照影响位置的时间和车头朝向以及相应光照影响位置受光照影响的时间和光源方向来判断该位置是否构成影响所述车辆的光照影响位置。
28、根据本发明的进一步实施例,所述摄像头被进一步配置成识别捕捉到的过曝图像中因受光线照射影响导致过曝的图像,并且所述控制单元被进一步配置成响应于识别到因光线照射导致过曝的图像,将所述过曝图像及其相关联的时间以及车头朝向作为光照影响事件上报给与所述车辆相关联的服务端。
29、与现有技术相比,本发明提供的自动驾驶控制方法至少具有以下优点:
30、1、可以确定行驶路径沿途的受光照影响可能导致自动驾驶用摄像头不可靠情况发生的位置,从而在行驶到风险位置点附近时,可及时调整自动驾驶策略,以降低安全隐患;
31、2、提供了可供服务器或车辆推算沿途可能遭遇晃眼事件的位置的计算方法;
32、3、提供了晃眼事件上报和标记平台,通过收集用户手动上报或车辆自动上报的事件,平台确定晃眼事件发生的位置并维护相关时间、原因、光源方向等信息,并且可基于收集到的数据训练用于识别晃眼位置和晃眼事件的模型。
33、通过阅读下面的详细描述并参考相关联的附图,这些及其他特点和优点将变得显而易见。应该理解,前面的概括说明和下面的详细描述只是说明性的,不会对所要求保护的各方面形成限制。
- 还没有人留言评论。精彩留言会获得点赞!