一种车辆冗余制动系统的制作方法
1.本发明属于制动技术领域,特别涉及一种冗余制动系统配置。
背景技术:
2.公开号为wo2021115827a1的发明专利公开了一种具有第一控制单元的多功能车辆的制动系统,所述第一控制单元(27)通过总线系统(45,46)连接到制动单元。连接的电动气轮(1)连接组合式制动缸(19)的服务制动室(20),并且通过总线(45,46)电子控制车轮制动单元(1),以控制服务制动室的气动制动压力(20)基于制动请求的组合式制动缸(19)。第二控制单元(29)通过总线(45,46)连接到电动气动轮式制动单元(1),并通过总线系统(45,46)的l中间电控制车轮制动单元(1)为了基于制动请求控制组合式制动缸(19)的使用制动室(20)的气动制动压力。
3.上述现有技术中,所述的总线系统(45,46)为两根实质上没有区别的数据传输线,设立目的在于防止45或46单根线出现问题后还存在另一根线能传输数据,确保制动系统的冗余设计。然而,基于上述45、46总线系统本质上一样设置的数据传输线,两跟线发生错误信号的概率相同,仍存在较大的风险,所以需要设计一种不是两根实质上相同的传输线形成的冗余制动系统。
技术实现要素:
4.本发明的目的是针对现有的技术存在上述问题,提出了一种用到的通讯数据线不完全相同的车辆冗余制动系统。
5.为了实现创新本发明的目的可通过下列技术方案来实现:一种车辆冗余制动系统,包含制动请求装置,车轴,制动器和控制单元,所述的车轴包含第一车轴,所述的制动器包含第一车轴上的第一制动器,所述的控制单元还包含第一制动器上的第一轴控制单元,所述的第一轴控制单元与第一制动器之间设有第一通讯数据线;所述的车轴还包含第二车轴,所述的制动器还包含第二车轴上的第二制动器,所述的控制单元还包含第二制动器上的第二轴控制单元,所述的第二轴控制单元与第二车轴控制器之间也设有第一通讯数据线;第一通讯数据线用于在车轴内部连接,当车辆制动系统无故障时,第一轴控制单元和第二轴控制单元可分别获取制动请求信号,也可以获取其他信号例如车速车重转向角等,分别计算自身车轴两侧车轮上的制动器所需要的制动力,最后由第一通讯数据线将第一轴控制单元制动力信号传递给第一制动器,将第二轴控制单元的制动力信号传递给第二制动器。
6.所述的相邻的车轴之间还设有第二通讯数据线,所述的第二通讯数据线依次连接控制单元和与控制单元所在车轴相邻的车轴上的制动器。第二通讯数据线是第一通讯数据线的冗余制动配置,每条线路依次交替的连接控制单元和制动器,在第一通讯数据线的基础上,效验和改善相邻车轴之间的故障,确保制动力在整车上的分布更加均匀,使相邻车轴实现更加稳定可靠的制动。
7.在上述的车辆冗余制动系统中,所述的车轴还包含第三车轴,所述的制动器包含第三车轴上的第三制动器,所述的控制单元还包含第三制动器上的第三轴控制单元,所述的第三轴控制单元与第三制动器之间设有第一通讯数据线;所述的车轴还包含第四车轴,所述的制动器包含第四车轴上的第四制动器,所述的控制单元还包含第四制动器上的第四轴控制单元,所述的第四轴控制单元与第四制动器之间也设有第一通讯数据线;
8.在上述的车辆冗余制动系统中,还包含第三通讯数据线,所述的第三通讯数据线连接上述所有控制单元。第三通讯数据线在所有车轴的控制单元之连接,在第一通讯数据线和第二通讯数据线的基础上再次实现安全冗余配置,在各车轴的控制单元之间互相校验,如果某个车轴的控制单元存在明显异常情况,例如其计算的制动力与其余车轴的控制单元的计算值差距较大,则可选择将其他车轴的控制单元的制动信号传递给它使用,或选择停止该车轴的制动,由其他车轴完成制动。所以在单个车轴或车轴上的车轮制动器等出现故障后,可由第三通讯数据线识别并加以改善。
9.在上述的车辆冗余制动系统中,所述的第二通讯数据线路依次交替连接奇数车轴上的控制单元和偶数车轴上的制动器;所述的第二通讯数据线路还依次交替连接偶数车轴上的控制单元和奇数车轴上的制动器。每条线间隔设置,可以有效改善间隔车辆之间的故障,确保间隔的车轴之间的制动力更加可靠。
10.在上述的车辆冗余制动系统中,所述的第二通讯数据线包含线路一,所述的线路一连接第一轴控制单元、第三轴控制单元、第二制动器和第四制动器;还包含线路二,所述的线路二连接第二轴控制单元、第四轴控制单元、第一制动器和第三制动器。线路一跟线路二间隔设置,并将所有车轴中的制动器和控制单元连接起来,确保无论任何数量的车轴都不会遗漏制动器和控制单元,在第一通讯数据线的技术上实现通讯冗余。
11.在上述的车辆冗余制动系统中,还包含第三通讯数据线,所述的第三通讯数据线连接上述所有控制单元,所述的第三通讯数据线连接第一轴控制单元、第二轴控制单元、第三轴控制单元和第四轴控制单元等所有控制单元。
12.在上述的车辆冗余制动系统中,所述的制动请求装置可以产生供控制单元接受的制动请求信号,所述的制动请求装置为制动踏板、驻车开关或自动驾驶系统、自动辅助驾驶系统等自动制动输入装置。
13.在上述的车辆冗余制动系统中,所述的控制单元为电子控制单元,所述的控制单元还包含储能模块,所述的储能模块可以向控制单元和制动器提供电力。
14.在上述的车辆冗余制动系统中,所述的第一通讯数据线、第二通讯数据线、第三通讯数据线为can总线或flexray总线、以太网等。
15.在上述的车辆冗余制动系统中,所述的制动器包含电机、控制器、传递机构、卡钳、制动盘等。所述的控制单元控制控制器,所述的电机由控制器提供驱动电流,经传递机构连接、减速、转换运动方式等传递至卡钳,所述的卡钳受电机驱动后与制动盘产生摩擦最终实现制动。
16.与现有技术相比,本制动系统设置了交替设置的第二通讯数据线,确保在第一通讯数据线的基础上设有不完全相同的冗余,尤其适合在三轴以上的车辆中使用,确保制动力在整车上的分布更加均衡;还设有第三通讯数据线,检测第一通讯数据线与第二通讯数据线的差距是否过大,确保第三重冗余,减少故障的概率。
附图说明
17.图1是本发明实施例1只有两个车轴的结构示意图;
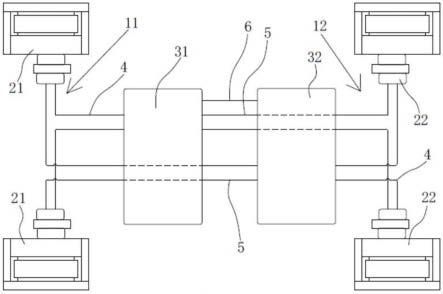
18.图2是本发明实施例2有四个车轴的结构示意图。
19.图中,1、车轴;11、第一车轴;12、第二车轴;13、第三车轴;14、第四车轴;2、制动器;21、第一制动器;22、第二制动器;23、第三制动器;24、第四制动器;3、控制单元;31、第一轴控制单元;32、第二轴控制单元;33、第三轴控制单元;34、第四轴控制单元;4、第一通讯数据线;5、第二通讯数据线;51、线路一;52、线路二;6、第三通讯数据线。
具体实施方式
20.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
21.具体实施例1如图1所示:一种车辆冗余制动系统,包含制动请求装置,车轴1,制动器2和控制单元3,车轴1包含第一车轴11,制动器2包含第一车轴11上的第一制动器21,控制单元3还包含第一制动器21上的第一轴控制单元31,第一轴控制单元31与第一制动器21之间设有第一通讯数据线4;还包含第二车轴12,制动器2包含第二车轴12上的第二制动器22,控制单元3包含第二制动器22上的第二轴控制单元32,第二轴控制单元32与第二制动器22之间也设有第一通讯数据线4;第一通讯数据线4用于在车轴1内部连接,当车辆制动系统无故障时,第一轴控制单元31和第二轴控制单元32可分别获取制动请求信号,也可以获取其他信号例如车速车重转向角等,分别计算自身车轴1两侧车轮上的制动器2所需要的制动力,最后由第一通讯数据线4将第一轴控制单元31制动力信号传递给第一制动器21,将第二轴控制单元32的制动力信号传递给第二制动器22。第一车轴11和第二车轴12之间还设有第二通讯数据线5,第二通讯数据线5依次连接控制单元3和与控制单元3所在车轴1相邻的车轴1上的制动器2,第二通讯数据线5路包含连接第一轴控制单元31和第二制动器22的线路一51、连接第二轴控制单元32和第一制动器21的线路二52。第二通讯数据线5是第一通讯数据线4的冗余制动配置,每条线路依次交替的连接控制单元3和制动器2,在第一通讯数据线4的基础上,效验和改善相邻车轴1之间的故障,确保制动力在整车上的分布更加均匀,使相邻车轴1实现更加稳定可靠的制动。
22.还包含第三通讯数据线6,所述的第三通讯数据线6连接上述所有控制单元3,即连接第一轴控制单元31和第二轴控制单元32。第三通讯数据线6在所有车轴1的控制单元3之连接,在第一通讯数据线4和第二通讯数据线5的基础上再次实现安全冗余配置,在各车轴1的控制单元3之间互相校验,如果某个车轴1的控制单元3存在明显异常情况,例如其计算的制动力与其余车轴1的控制单元3的计算值差距较大,则可选择将其他车轴1的控制单元3的制动信号传递给它使用,或选择停止该车轴1的制动,由其他车轴1完成制动。所以在单个车轴1或车轴1上的车轮制动器2等出现故障后,可由第三通讯数据线6识别并加以改善。
23.制动请求装置可以产生供控制单元3接受的制动请求信号,所述的制动请求装置为制动踏板、驻车开关或自动驾驶系统、自动辅助驾驶系统等自动制动输入装置。控制单元3为电子控制单元3,所述的控制单元3还包含储能模块,所述的储能模块可以向控制单元3和制动器2提供电力。上述第一通讯数据线4、第二通讯数据线5、第三通讯数据线6为can总线或flexray总线、以太网等。所述的制动器2包含电机、控制器、传递机构、卡钳、制动盘等。
所述的控制单元3控制控制器,所述的电机由控制器提供驱动电流,经传递机构连接、减速、转换运动方式等传递至卡钳,所述的卡钳受电机驱动后与制动盘产生摩擦最终实现制动。
24.具体实施例2如图2所示:一种车辆冗余制动系统,包含制动请求装置,车轴1,制动器2和控制单元3,车轴1包含第一车轴11、第二车轴12、第三车轴13和第四车轴14,第一车轴11上设有第一制动器21、第一轴控制单元31,第一轴控制单元31与第一制动器21之间设有第一通讯数据线4;第二车轴12上设有第二制动器22、第二轴控制单元32,第二轴控制单元32与第二制动器22之间设有第一通讯数据线4;第三车轴13上设有第三制动器23、第三轴控制单元33,第三轴控制单元33与第三制动器23之间设有第一通讯数据线4;第四车轴14上设有第四制动器24、第四轴控制单元34,第四轴控制单元34与第四制动器24之间设有第一通讯数据线4。
25.第二通讯数据线5路依次交替连接奇数车轴1上的控制单元3和偶数车轴1上的制动器2;第二通讯数据线5路依次交替连接奇数车轴1上的控制单元3和偶数车轴1上的制动器2;所述的第二通讯数据线5路还依次交替连接偶数车轴1上的控制单元3和奇数车轴1上的制动器2。第二通讯数据线5包含线路一51,线路一51连接第一轴控制单元31、第三轴控制单元33、第二制动器22和第四制动器24;还包含线路二52,所述的线路二52连接第二车轴12控单元、第四轴控制单元34、第一制动器21和第三制动器23。线路一51跟线路二52间隔设置,并将所有车轴1中的制动器2和控制单元3连接起来,确保无论任何数量的车轴1都不会遗漏制动器2和控制单元3,在第一通讯数据线4的技术上实现通讯冗余,可以有效改善间隔车辆之间的故障,确保间隔的车轴1之间的制动力更加可靠。
26.还包含第三通讯数据线6,第三通讯数据线6连接上述所有控制单元3,第三通讯数据线6连接第一轴控制单元31、第二轴控制单元32、第三轴控制单元33和第四轴控制单元34等所有控制单元3。第三通讯数据线6在所有车轴1的控制单元3之连接,在第一通讯数据线4和第二通讯数据线5的基础上再次实现安全冗余配置,在各车轴1的控制单元3之间互相校验,如果某个车轴1的控制单元3存在明显异常情况,例如其计算的制动力与其余车轴1的控制单元3的计算值差距较大,则可选择将其他车轴1的控制单元3的制动信号传递给它使用,或选择停止该车轴1的制动,由其他车轴1完成制动。所以在单个车轴1或车轴1上的车轮制动器2等出现故障后,可由第三通讯数据线6识别并加以改善。
27.制动请求装置可以产生供控制单元3接受的制动请求信号,所述的制动请求装置为制动踏板、驻车开关或自动驾驶系统、自动辅助驾驶系统等自动制动输入装置。控制单元3为电子控制单元3,所述的控制单元3还包含储能模块,所述的储能模块可以向控制单元3和制动器2提供电力。上述第一通讯数据线4、第二通讯数据线5、第三通讯数据线6为can总线或flexray总线、以太网等。所述的制动器2包含电机、控制器、传递机构、卡钳、制动盘等。所述的控制单元3控制控制器,所述的电机由控制器提供驱动电流,经传递机构连接、减速、转换运动方式等传递至卡钳,所述的卡钳受电机驱动后与制动盘产生摩擦最终实现制动。
28.本实施例2与实施例1的区别在于增加第三车轴13和第四车轴14,并拓展了第一通讯数据线4、第二通讯数据线5第三通讯数据线6与上述车轴1之间的连接关系。
29.本车辆冗余系统的工作过程如下:第一轴控制单元31、第二轴控制单元32、第三轴控制单元33和第四轴控制单元34接受到来自踏板的制动请求信号后,各自车轴1上的控制单元3计算出各自车轴1所需的制动力,并由第一通讯数据线4传递给各自车轴1上的制动器
2,由各自制动器2实现对各自车轴1的制动;第三通讯数据线6连接所有车轴1之间的控制单元3,校验各自控制单元3接收到的制动请求信号和传递给制动器2的制动力信号,确保误差在可控范围内;第二通讯数据线5的线路一51和线路二52分别交替交叉连接控制单元3和相邻车轴1上的制动器2,实现与第一通讯数据线4不完全一致的安全冗余。
30.本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1